

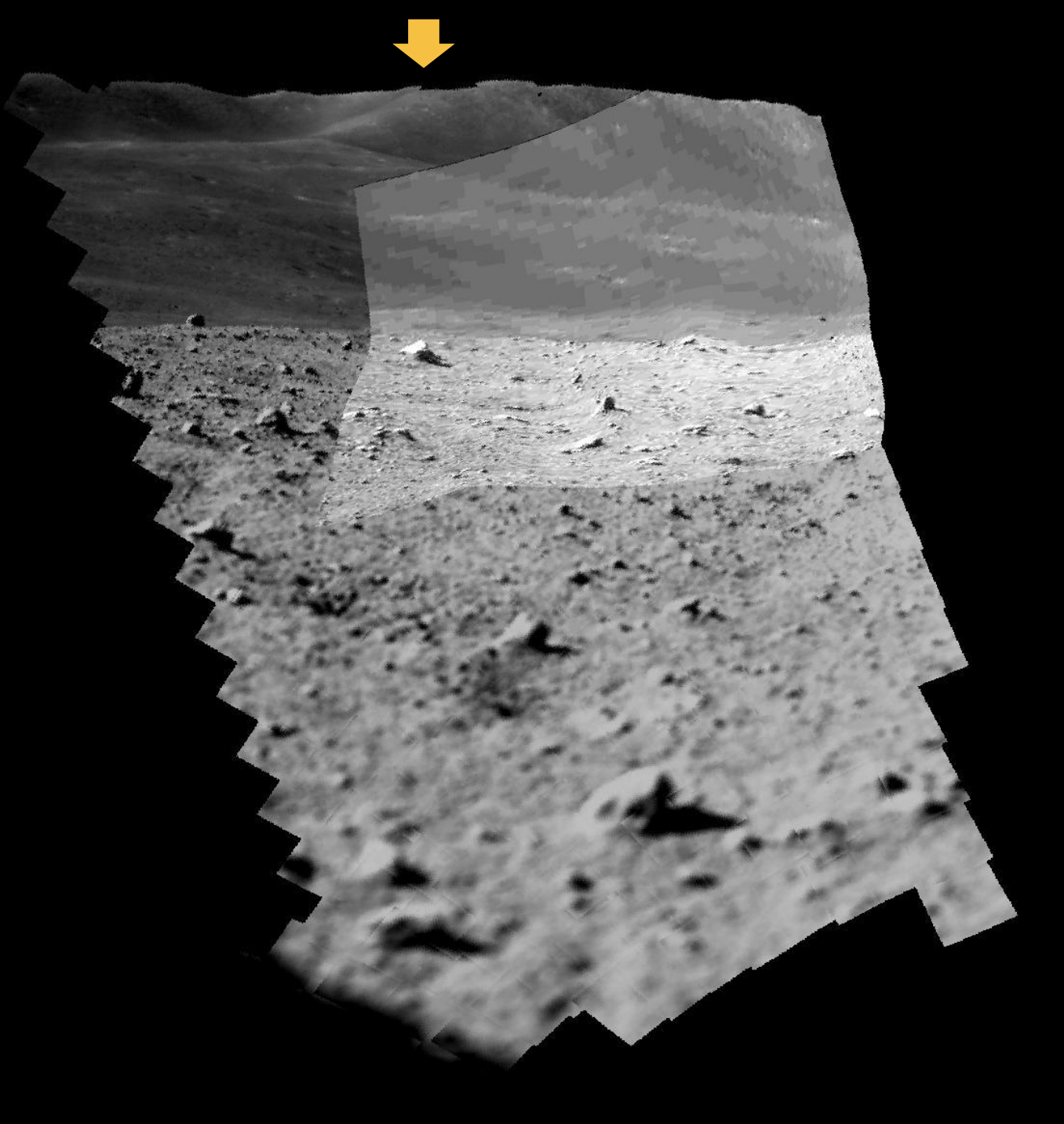
Ni boca abajo, ni de lado. La sonda japonesa SLIM quedó con el morro clavado en el suelo durante su alunizaje del 19 de enero de 2024 a las 15:20 UTC por culpa del fallo de uno de los dos motores principales, que perdió una tobera. El hecho de que los paneles solares no estuviesen generando electricidad apuntaba a que la sonda quedó con una orientación incorrecta tras posarse en la superficie y, además, los datos de telemetría mostraban la sonda con el morro hacia abajo. Pero la interpretación de estos datos no es sencilla y había muchos escenarios posibles que podían explicar la situación de la sonda. Sin embargo, la agencia espacial japonesa JAXA ha confirmado hoy 25 de enero, seis días después del alunizaje, que los paneles solares de SLIM se quedaron en la sombra por una orientación incorrecta de la nave, que quedó literalmente «clavada» en la Luna. Para llegar a esta conclusión no ha sido necesario un análisis concienzudo de la telemetría o llevar a cabo complejas simulaciones, sino simplemente ver la siguiente imagen:

Pro, ¿quién ha obtenido esta fotografía? Pues el pequeño robot-bola LEV-2, de 250 gramos y 8 centímetros de diámetro, que se separó de SLIM poco antes del aterrizaje a 5 metros de altitud junto con su compañero, el LEV-1, un robot un poco más grande, de 26 x 40 x 30 centímetros y 2,1 kilogramos de masa, con un sistema de comunicaciones de tan solo 90 gramos). El LEV-2, también apodado SORA-Q (ソラキュー), es capaz de desplazarse separando los dos hemisferios de su estructura y dispone de dos pequeñas cámaras. Es un proyecto de JAXA y la empresa de juguetes Takara-Tomy, a cargo de los muñecos de los Transformers. LEV-2 envío esta imagen el día 19 de enero a través de su robot hermano LEV-1, que sí era capaz de comunicarse directamente con la Tierra. De hecho, el LEV-1 se ha convertido en la sonda más pequeña y ligera que se ha comunicado directamente con la Tierra desde la superficie lunar. El LEV-1 iba equipado con un mecanismo saltador y logró desplazarse por la superficie dando saltos.
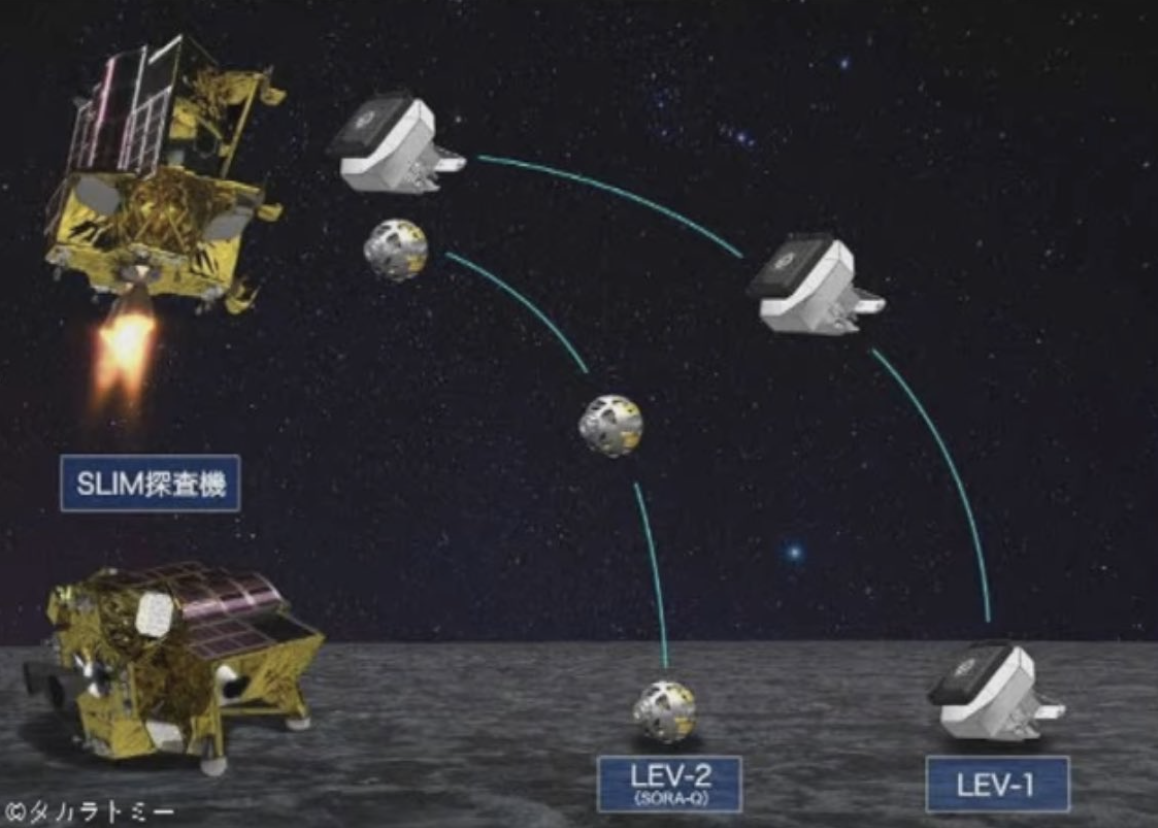


Aunque no es la primera sonda que salta por la Luna —la sonda Surveyor 6 de la NASA y la Chandrayaan 3 de la India se le han adelantado—, sí es la primera en hacerlo de forma mecánica sin usar propulsores. LEV-1 se apagó a las 17:10 UTC y el control de la misión volverá a intentar contactar con la sonda cuando las condiciones de iluminación cambien. Por otro lado, en esta misión el pequeño LEV-2 ha podido demostrar su valía después de que el primer ejemplar de este robot se estrellase en la Luna con el módulo lunar japonés HAKUTO-R en abril del año pasado.
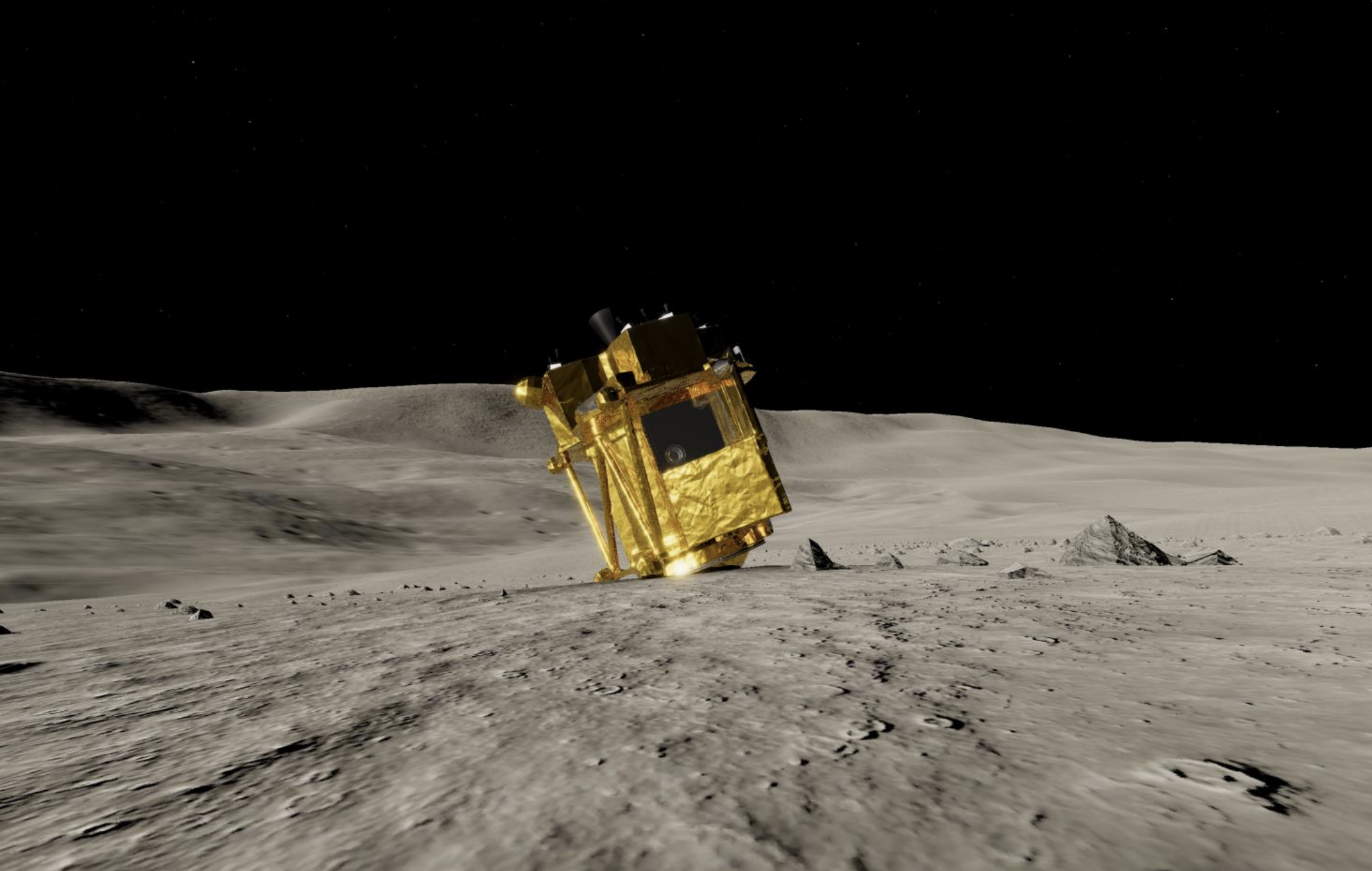

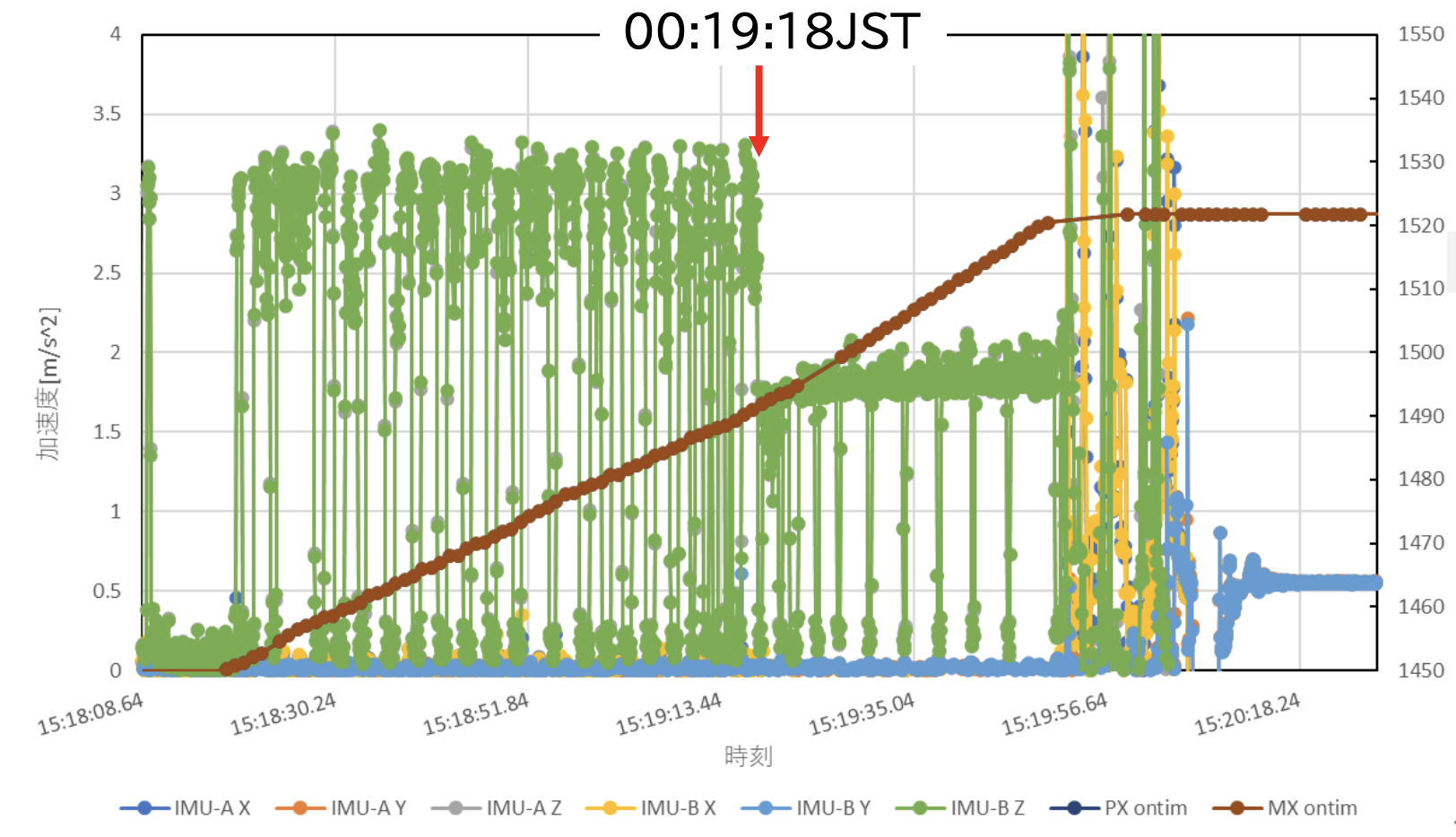
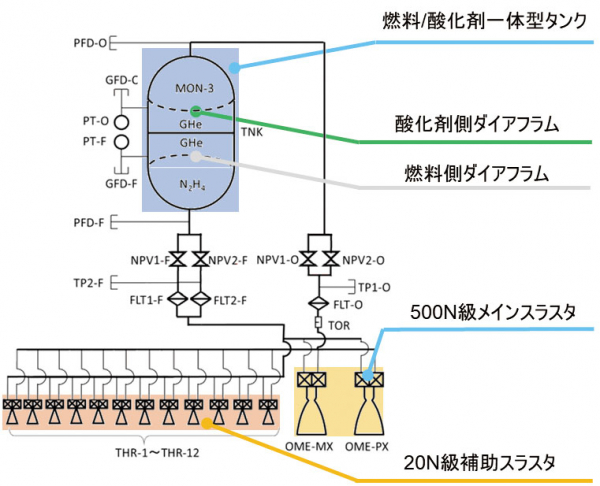
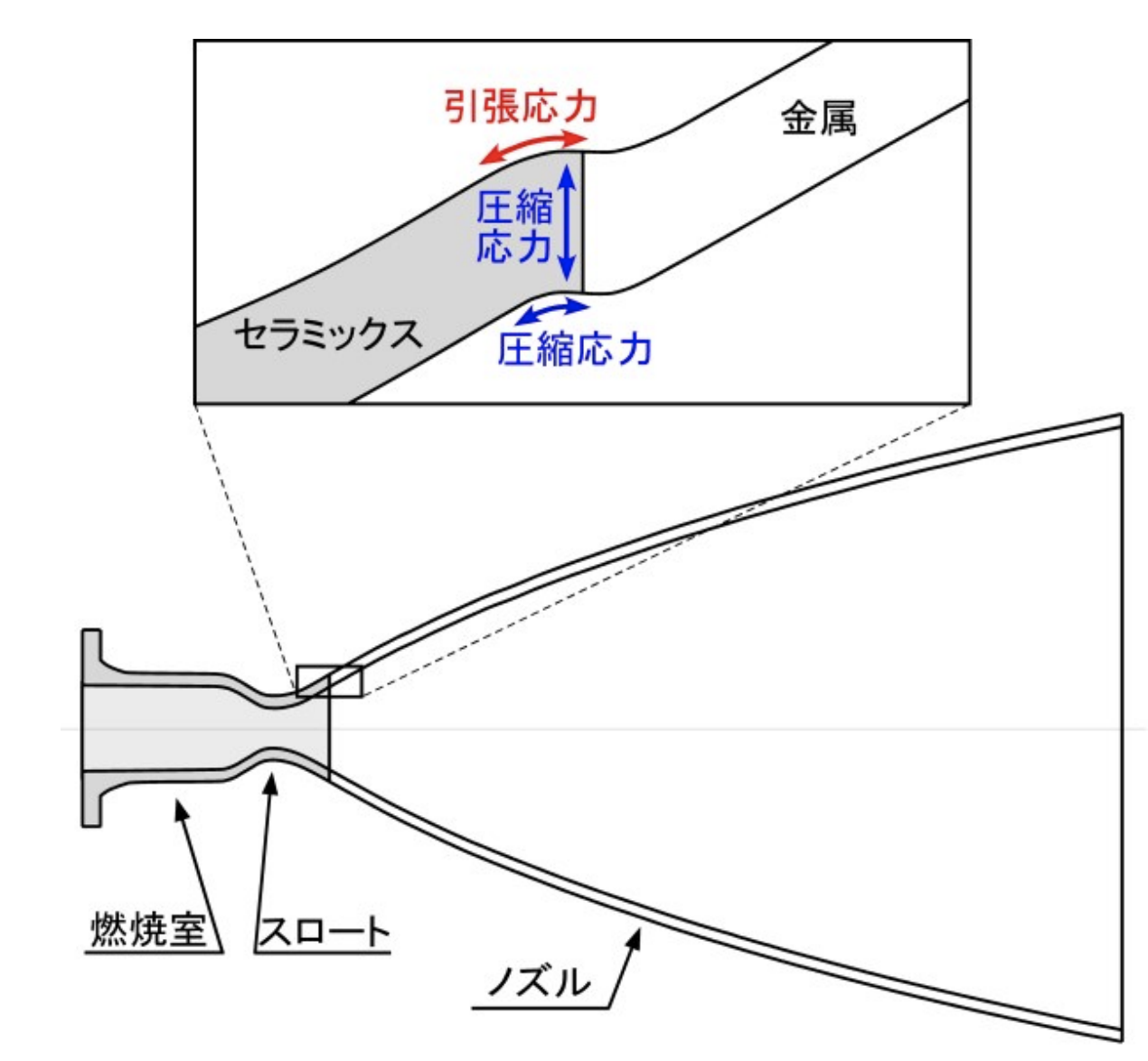
Pero, ¿por qué quedó SLIM en esta posición? Pues por culpa de uno de los dos motores principales de la sonda, que falló a 50 metros de altitud, justo antes de que la sonda detuviese su descenso y maniobrase horizontalmente para evitar los obstáculos del terreno usando navegación óptica. El motor no se limitó a fallar, sino que su tobera se desprendió. El otro motor compensó la pérdida y SLIM logró realizar esta maniobra, desplazándose hacia el este y continuando luego con el descenso. Sin embargo, en la delicada maniobra final de transición de la posición vertical a horizontal el vehículo no pudo compensar la pérdida de uno de los motores y se desequilibró, terminando en una posición con el morro hacia abajo. Curiosamente, la velocidad del contacto con el suelo no fue demasiado alta, sino demasiado baja, de 1,4 m/s. Cada motor OME de SLIM tiene un empuje medio de 500 newton y dispone de una cámara de combustión de cerámica de nitruro de silicio capaz de soportar 1500 ºC, mientras que la tobera es de niobio. Una de las dificultades en el diseño de este motor fue la soldadura de la tobera metálica a la cerámica (ahora está claro por qué). Los motores son básicamente similares al motor principal de la sonda Akatsuki para el estudio de Venus, que, precisamente, también tuvo un fallo catastrófico en 2010 en el que la tobera quedó probablemente destruida, imposibilitando que la nave se pusiese en órbita del planeta (finalmente logró alcanzar la órbita de Venus en 2015 mediante los propulsores secundarios). Por el momento se desconoce si el fallo de este motor de SLIM tiene que ver con el que sufrió el OME de Akatsuki, aunque los dos incidentes son muy parecidos (por cierto, gracias al debate en los comentarios en la anterior entrada sobre SLIM acerca del motor entre Erick y David B hemos podido aprender más sobre el mismo).

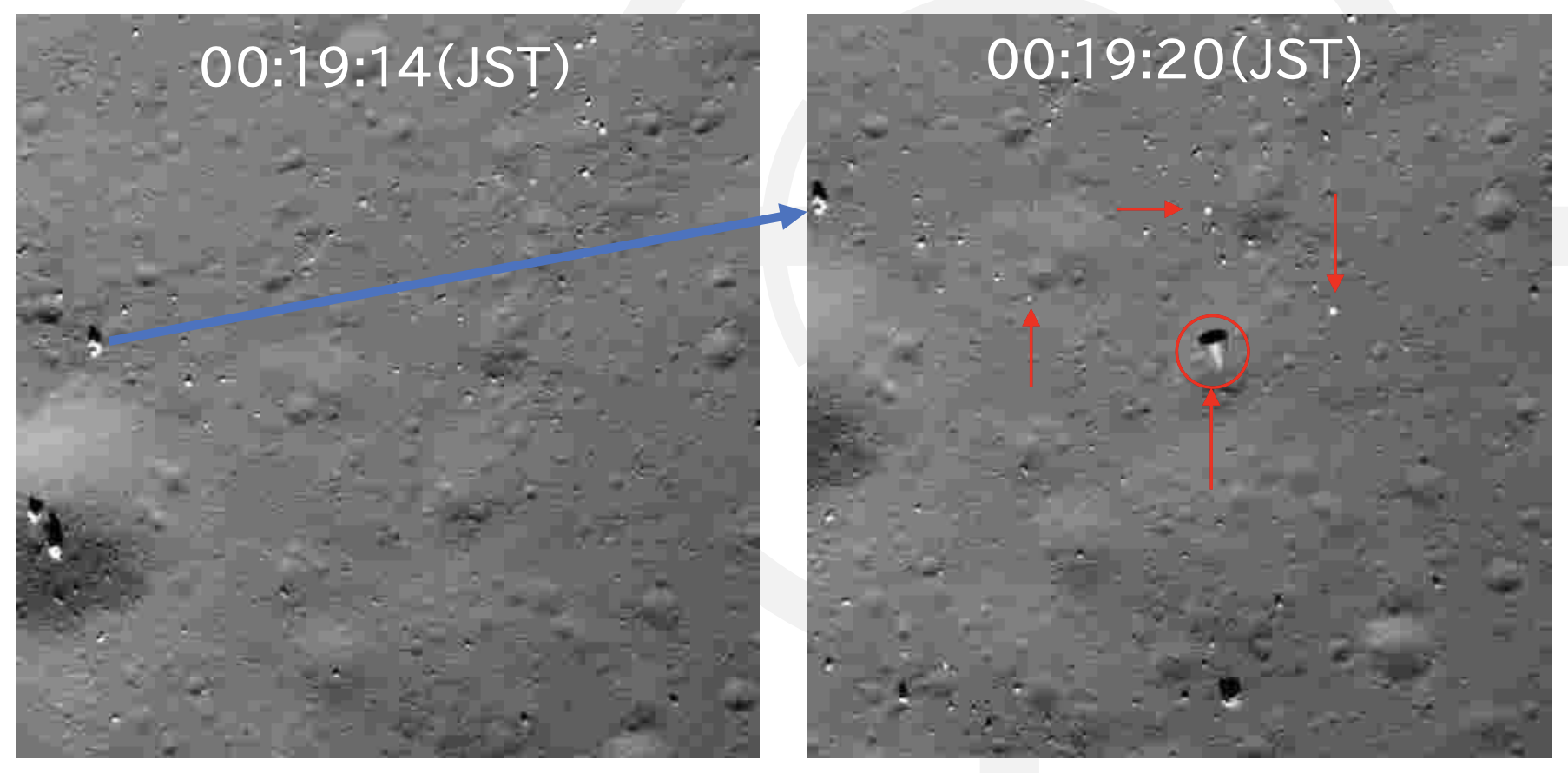
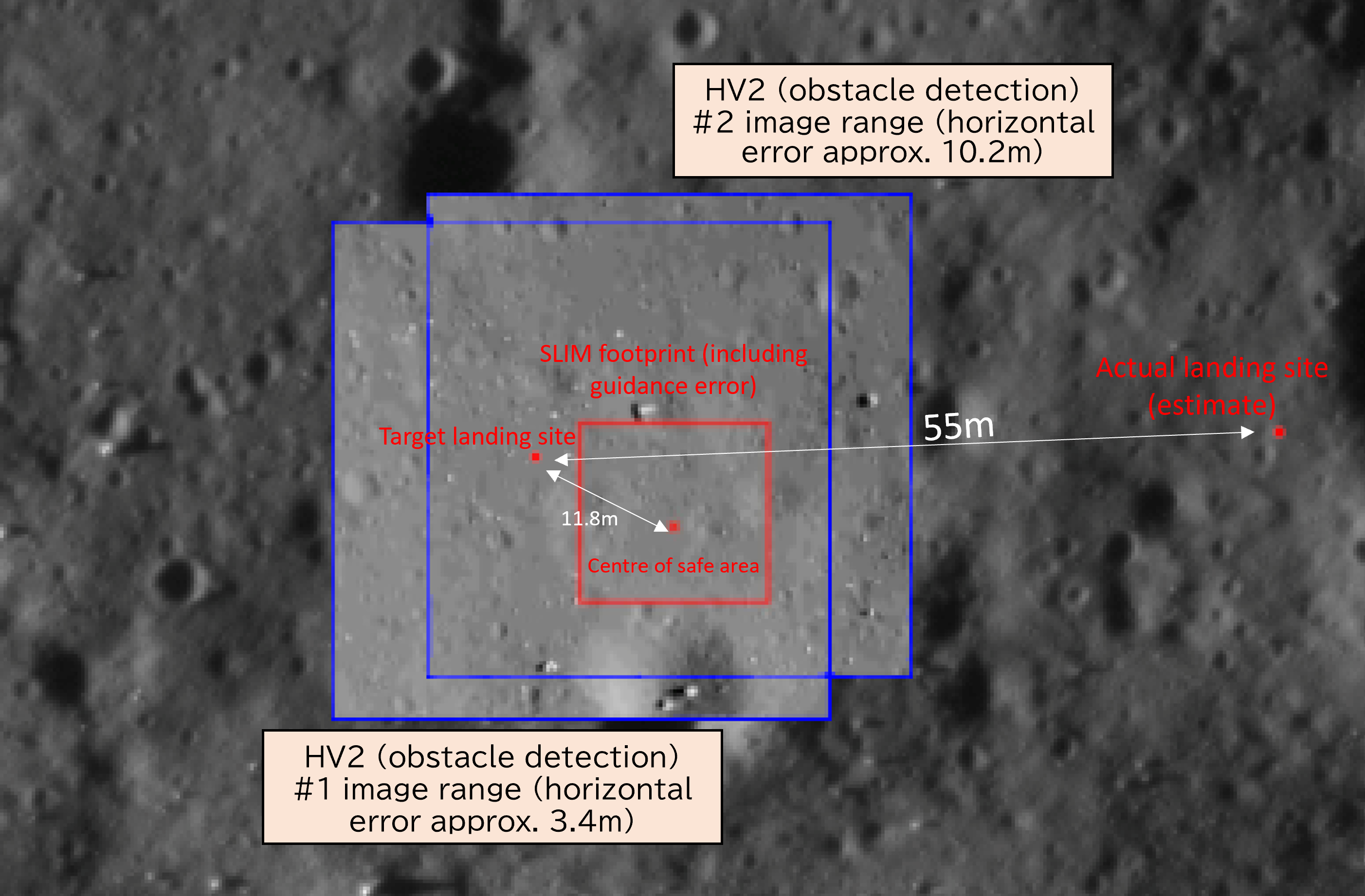
Pese al fallo del motor, SLIM aterrizó a tan solo 55 metros del lugar original de alunizaje, al este del cráter Shioli (13,31549º sur, 25,24889º este). JAXA calcula que la precisión en el aterrizaje gracias a la maniobra de navegación autónoma fue de 3 a 4 metros. De esta forma, SLIM logró alcanzar el objetivo principal de la misión, un alunizaje con una precisión superior a 100 metros. De hecho, se convierte en la nave que ha alunizado con una mayor precisión en la historia. Podemos decir que SLIM ha clavado su alunizaje, literalmente. Por ejemplo, el Apolo 12, que logró aterrizar cerca de la sonda Suerveyor 3, alcanzó una precisión de 163 metros, mientras que la reciente sonda india Chandrayaan 3 debía aterrizar en una elipse de 30 x 15 kilómetros (no hay datos concluyentes sobre la precisión final de las recientes misiones chinas). Para conseguir esta precisión, el sistema de navegación de SLIM analizó las imágenes del terreno en 14 ocasiones.
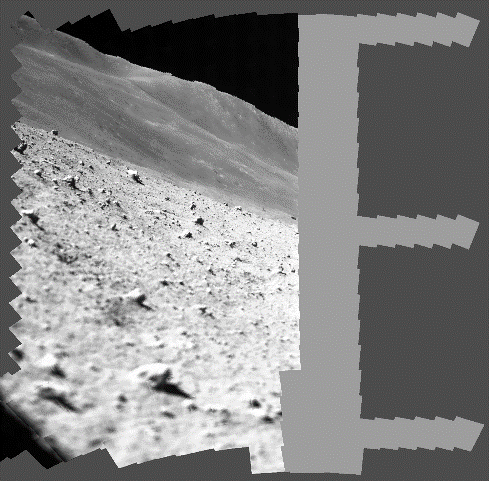
Antes de que se ordenase a la sonda entrar en hibernación a las 17:57 UTC del 19 de enero, SLIM logró enviar datos directamente a la Tierra y, aparte de las imágenes del pequeño LEV-2, la cámara de navegación y la cámara MBC pudieron funcionar. MBC tomó 257 imágenes del terreno circundante y el equipo de la misión ya ha puesto nombres de razas de perros a las rocas que se ven en el paisaje (Kaiken, Bulldog, Shibainu, Akitainu, etc.). La descarga de datos tuvo lugar entre las 15:20 y las 16:30 UTC y también se apagaron los calefactores y equipos secundarios para ahorrar la energía de las baterías. Entre las 16:30 y las 16:50 horas SLIM pasó de comunicarse con la estación principal en Japón a hacerlo con la DSN de la NASA. Luego, entre las 16:50 y las 17:35 UTC, se obtuvieron las observaciones de la cámara MBC (Multi-Band Camera) en modo pancromático (es decir, en blanco y negro; no se pudieron realizar imágenes multiespectrales con los diez filtros por la falta de tiempo antes de que se apagasen los sistemas). A las 17:57 UTC se ordenó desconectar la batería del sistema eléctrico (en ese momento quedaba un 12% de carga).

Tras la rueda de prensa de hoy, está claro que SLIM ha sido bastante más exitosa de lo que parecía tras la ducha de agua fría del pasado viernes. La pequeña sonda ha logrado funcionar en la superficie enviando numerosas imágenes y ha conseguido alcanzar su principal objetivo: un alunizaje de alta precisión (algo que será muy útil para la futura misión conjunta con India, LUPEX, y otras sondas relacionadas con el programa Artemisa). Y como bola extra tenemos el éxito de los pequeños robots LEV-1 y LEV-2. Eso sí, la misión ha tenido una vida muy corta y la sonda ha quedado en una posición un tanto… curiosa, cuanto menos. Pero SLIM podría tener un as en la manga. Antes de que se ponga el Sol en la zona de aterrizaje el 1 de febrero, la posición del Sol en el cielo habrá cambiado y los paneles solares estarán lo suficientemente iluminados como para intentar que la sonda resucite. Por ahora la JAXA no se rinde y SLIM tampoco.
No deja de ser curioso que los de la JAXA hayan puesto nombres de razas de perros a los pedruscos, cuando es de dominio público (porque lo sabéis, ¿no? ?) que en Japón hay muchos más gatos domésticos que perros. En concreto, hay 9 millones de mininos.
Creo que es para dar diferencia de tamaños.
No entiendo de gatos… los gatos son todos más o menos iguales no? De tamaño de raza, digo.
Cómo todo el mundo sabe (?) la Asociación Internacional del Gato (sí, existe) calcula que existen un total de 71 razas estandarizadas.
Todas con siete vidas… o mas !
Pues no sé para qué fechas estaba optimizada la orientación de los paneles solares. Pero si colocan la sonda como debería haber estado es probable que se queden peor que ahora.
Aunque sería un intento interesante probar a colocarla mirando al sol, aunque siga estando mal, antes de perderla definitivamente.
Solamente los japoneses reiterarían en el mismo error de la tobera.
Entonces como lo llamamos? Fracquexito, litofrenado suave de precisión…
Revivió!!! =D
Pues ha resucitado!!!