

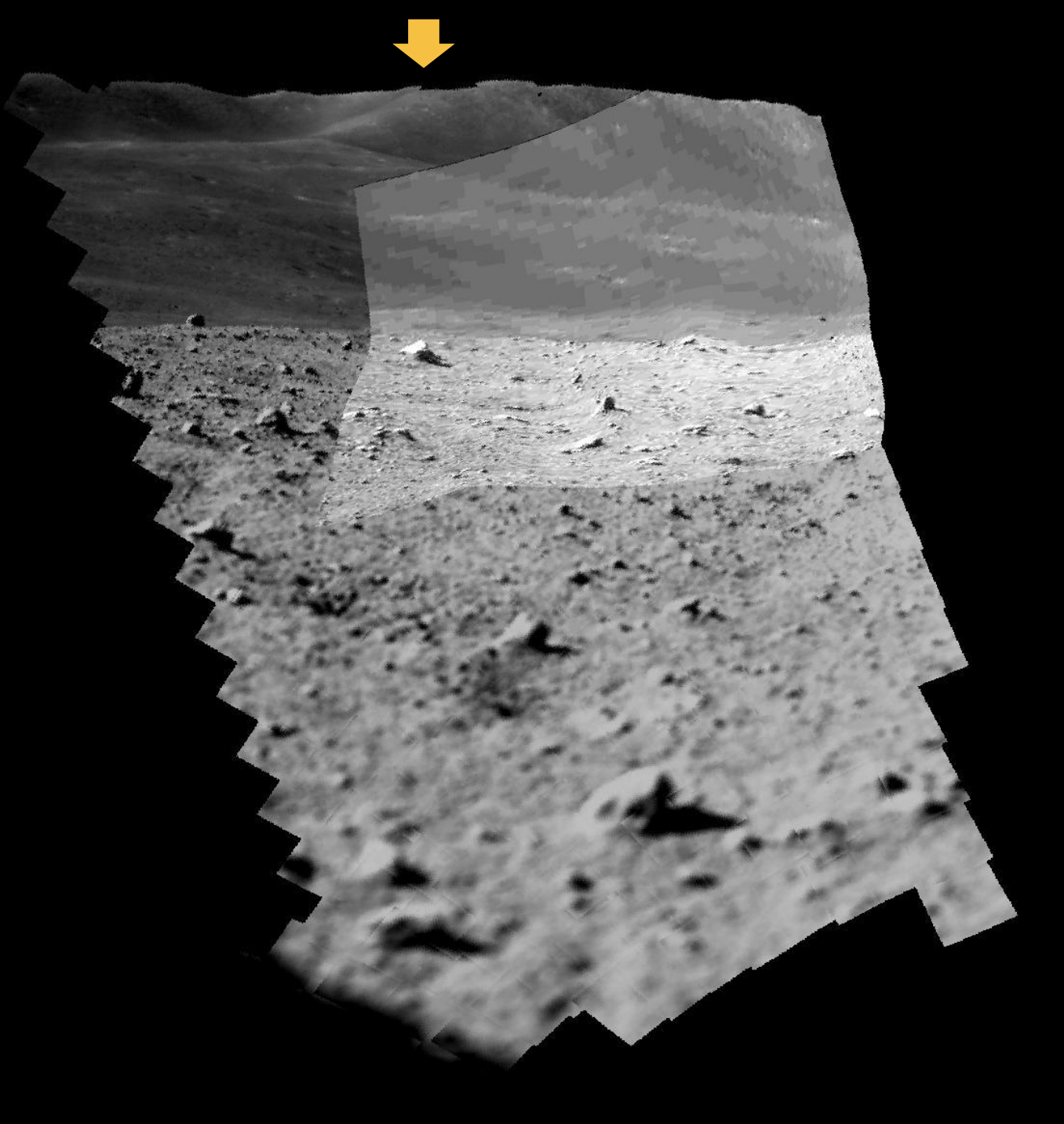
Ni boca abajo, ni de lado. La sonda japonesa SLIM quedó con el morro clavado en el suelo durante su alunizaje del 19 de enero de 2024 a las 15:20 UTC por culpa del fallo de uno de los dos motores principales, que perdió una tobera. El hecho de que los paneles solares no estuviesen generando electricidad apuntaba a que la sonda quedó con una orientación incorrecta tras posarse en la superficie y, además, los datos de telemetría mostraban la sonda con el morro hacia abajo. Pero la interpretación de estos datos no es sencilla y había muchos escenarios posibles que podían explicar la situación de la sonda. Sin embargo, la agencia espacial japonesa JAXA ha confirmado hoy 25 de enero, seis días después del alunizaje, que los paneles solares de SLIM se quedaron en la sombra por una orientación incorrecta de la nave, que quedó literalmente «clavada» en la Luna. Para llegar a esta conclusión no ha sido necesario un análisis concienzudo de la telemetría o llevar a cabo complejas simulaciones, sino simplemente ver la siguiente imagen:

Pro, ¿quién ha obtenido esta fotografía? Pues el pequeño robot-bola LEV-2, de 250 gramos y 8 centímetros de diámetro, que se separó de SLIM poco antes del aterrizaje a 5 metros de altitud junto con su compañero, el LEV-1, un robot un poco más grande, de 26 x 40 x 30 centímetros y 2,1 kilogramos de masa, con un sistema de comunicaciones de tan solo 90 gramos). El LEV-2, también apodado SORA-Q (ソラキュー), es capaz de desplazarse separando los dos hemisferios de su estructura y dispone de dos pequeñas cámaras. Es un proyecto de JAXA y la empresa de juguetes Takara-Tomy, a cargo de los muñecos de los Transformers. LEV-2 envío esta imagen el día 19 de enero a través de su robot hermano LEV-1, que sí era capaz de comunicarse directamente con la Tierra. De hecho, el LEV-1 se ha convertido en la sonda más pequeña y ligera que se ha comunicado directamente con la Tierra desde la superficie lunar. El LEV-1 iba equipado con un mecanismo saltador y logró desplazarse por la superficie dando saltos.
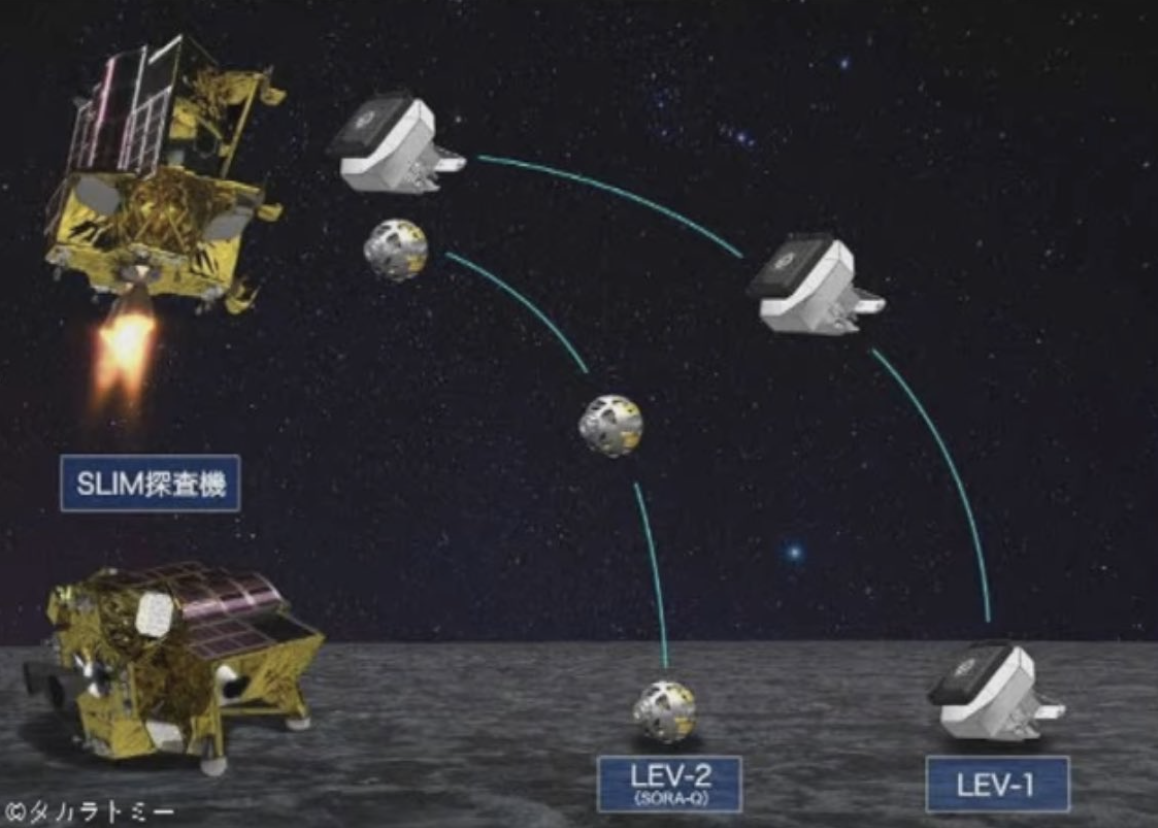


Aunque no es la primera sonda que salta por la Luna —la sonda Surveyor 6 de la NASA y la Chandrayaan 3 de la India se le han adelantado—, sí es la primera en hacerlo de forma mecánica sin usar propulsores. LEV-1 se apagó a las 17:10 UTC y el control de la misión volverá a intentar contactar con la sonda cuando las condiciones de iluminación cambien. Por otro lado, en esta misión el pequeño LEV-2 ha podido demostrar su valía después de que el primer ejemplar de este robot se estrellase en la Luna con el módulo lunar japonés HAKUTO-R en abril del año pasado.
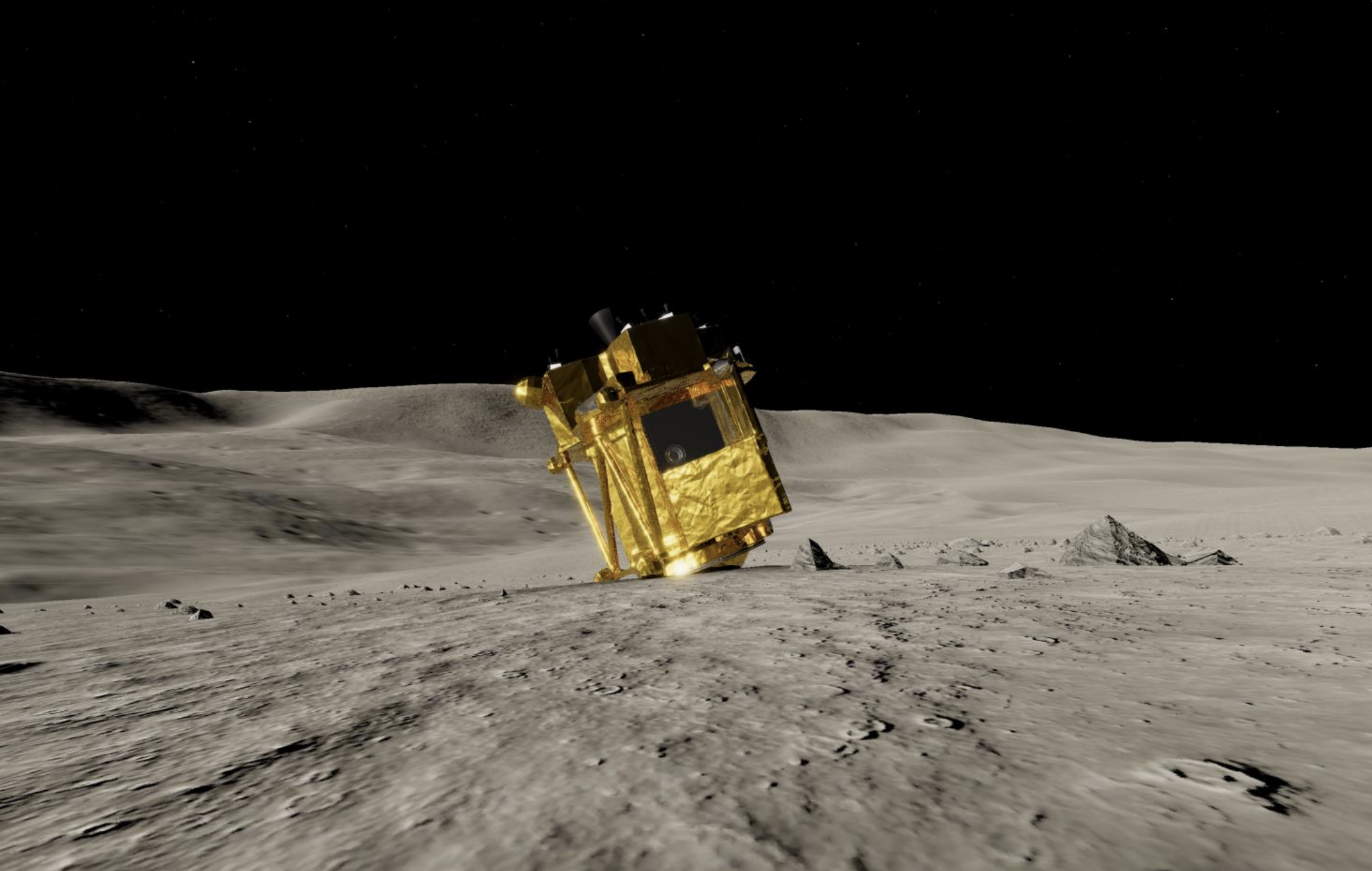

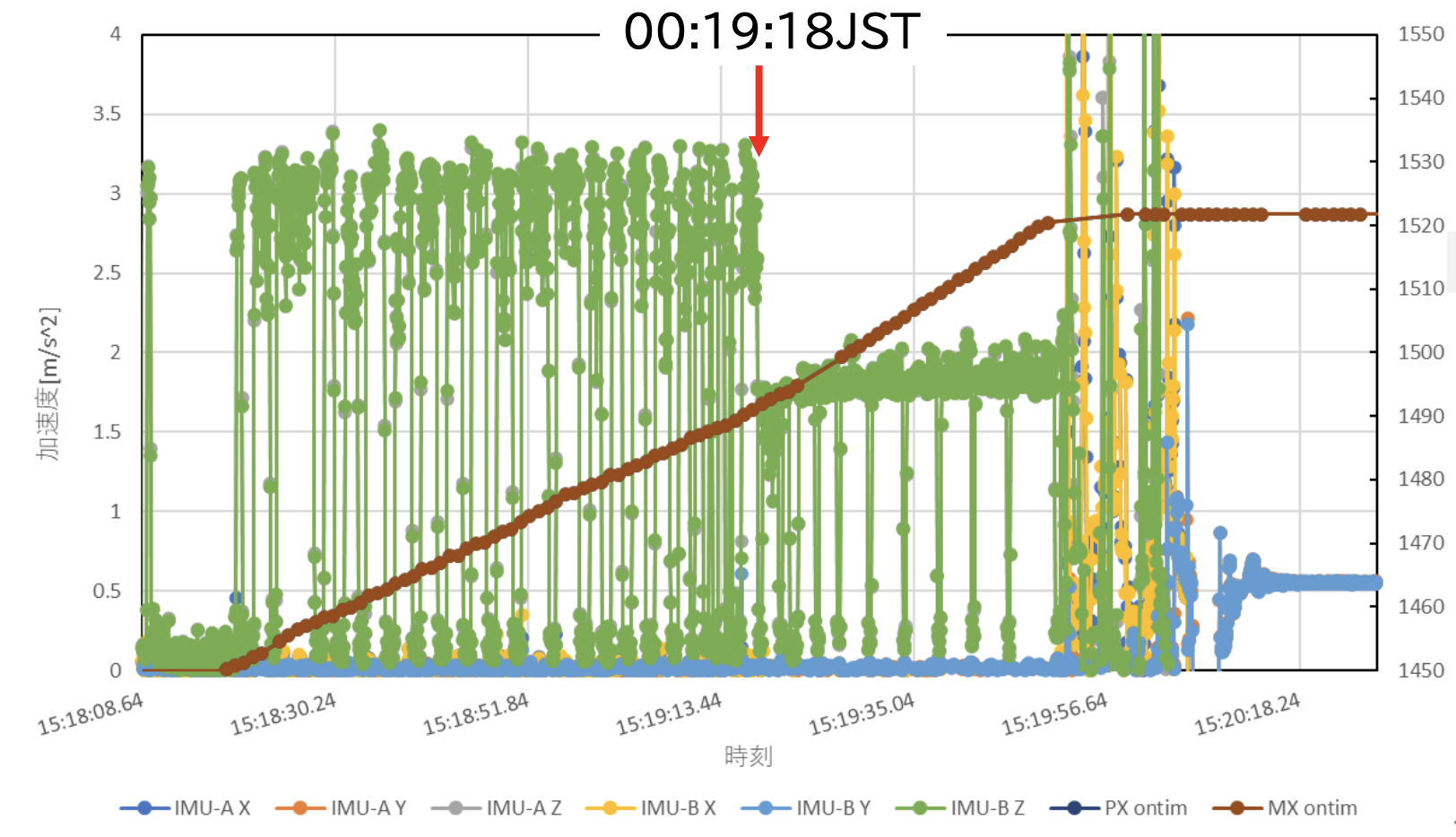
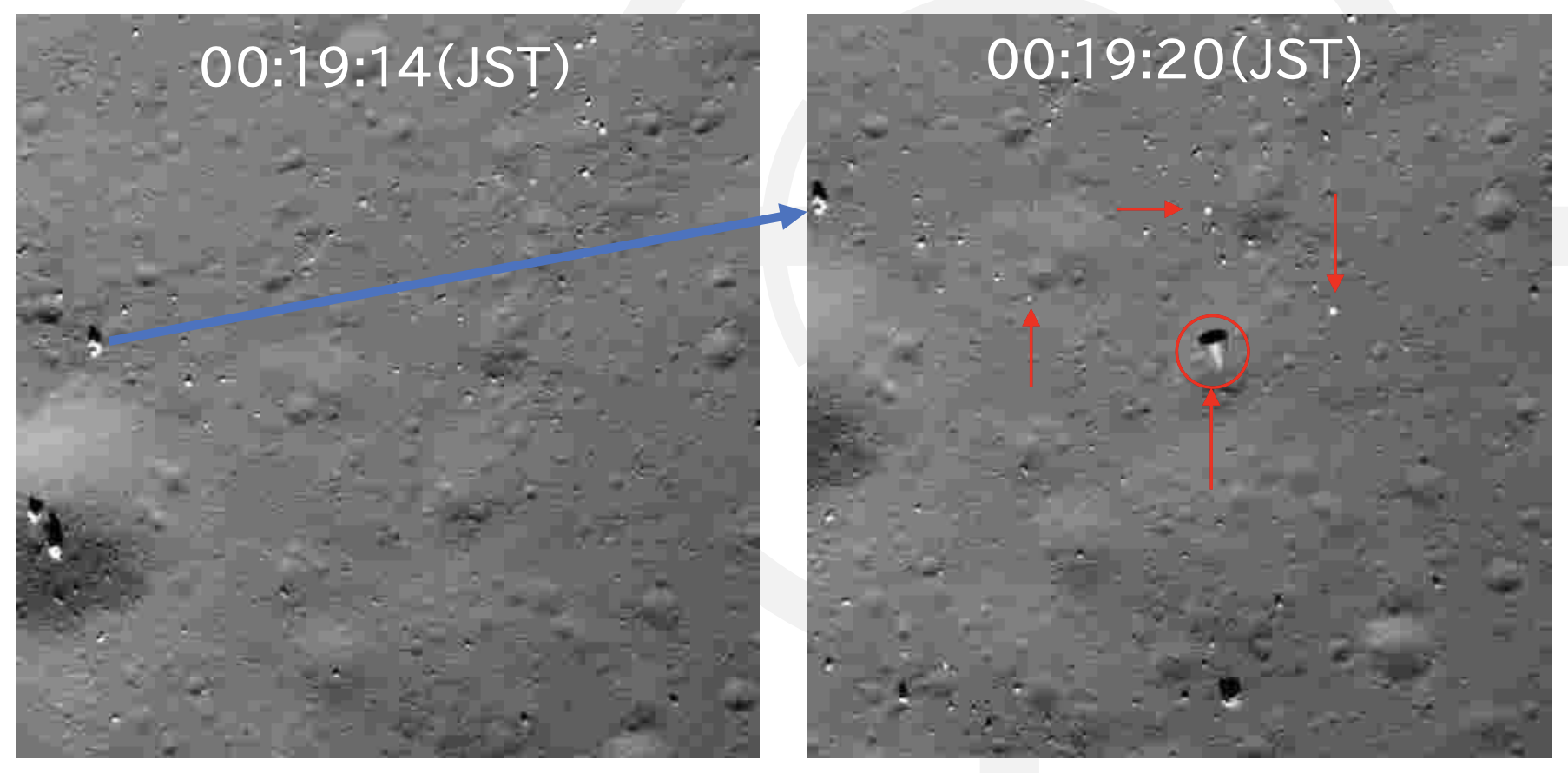
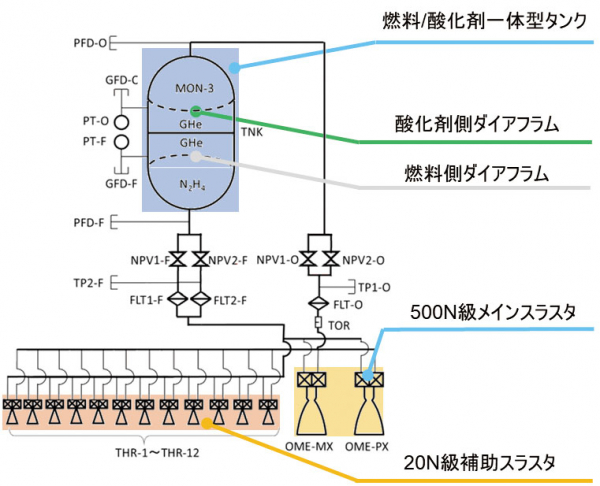
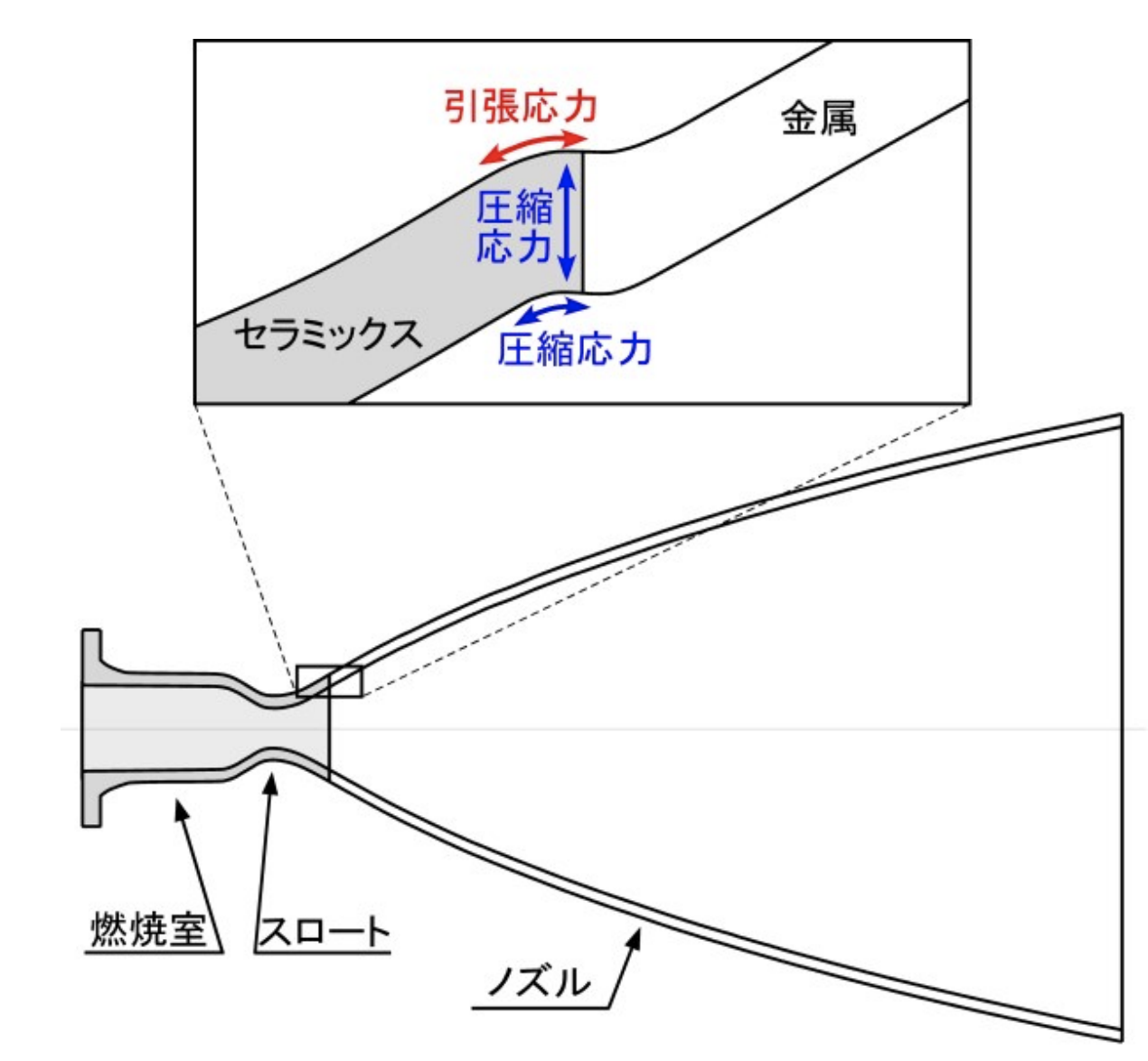
Pero, ¿por qué quedó SLIM en esta posición? Pues por culpa de uno de los dos motores principales de la sonda, que falló a 50 metros de altitud, justo antes de que la sonda detuviese su descenso y maniobrase horizontalmente para evitar los obstáculos del terreno usando navegación óptica. El motor no se limitó a fallar, sino que su tobera se desprendió. El otro motor compensó la pérdida y SLIM logró realizar esta maniobra, desplazándose hacia el este y continuando luego con el descenso. Sin embargo, en la delicada maniobra final de transición de la posición vertical a horizontal el vehículo no pudo compensar la pérdida de uno de los motores y se desequilibró, terminando en una posición con el morro hacia abajo. Curiosamente, la velocidad del contacto con el suelo no fue demasiado alta, sino demasiado baja, de 1,4 m/s. Cada motor OME de SLIM tiene un empuje medio de 500 newton y dispone de una cámara de combustión de cerámica de nitruro de silicio capaz de soportar 1500 ºC, mientras que la tobera es de niobio. Una de las dificultades en el diseño de este motor fue la soldadura de la tobera metálica a la cerámica (ahora está claro por qué). Los motores son básicamente similares al motor principal de la sonda Akatsuki para el estudio de Venus, que, precisamente, también tuvo un fallo catastrófico en 2010 en el que la tobera quedó probablemente destruida, imposibilitando que la nave se pusiese en órbita del planeta (finalmente logró alcanzar la órbita de Venus en 2015 mediante los propulsores secundarios). Por el momento se desconoce si el fallo de este motor de SLIM tiene que ver con el que sufrió el OME de Akatsuki, aunque los dos incidentes son muy parecidos (por cierto, gracias al debate en los comentarios en la anterior entrada sobre SLIM acerca del motor entre Erick y David B hemos podido aprender más sobre el mismo).

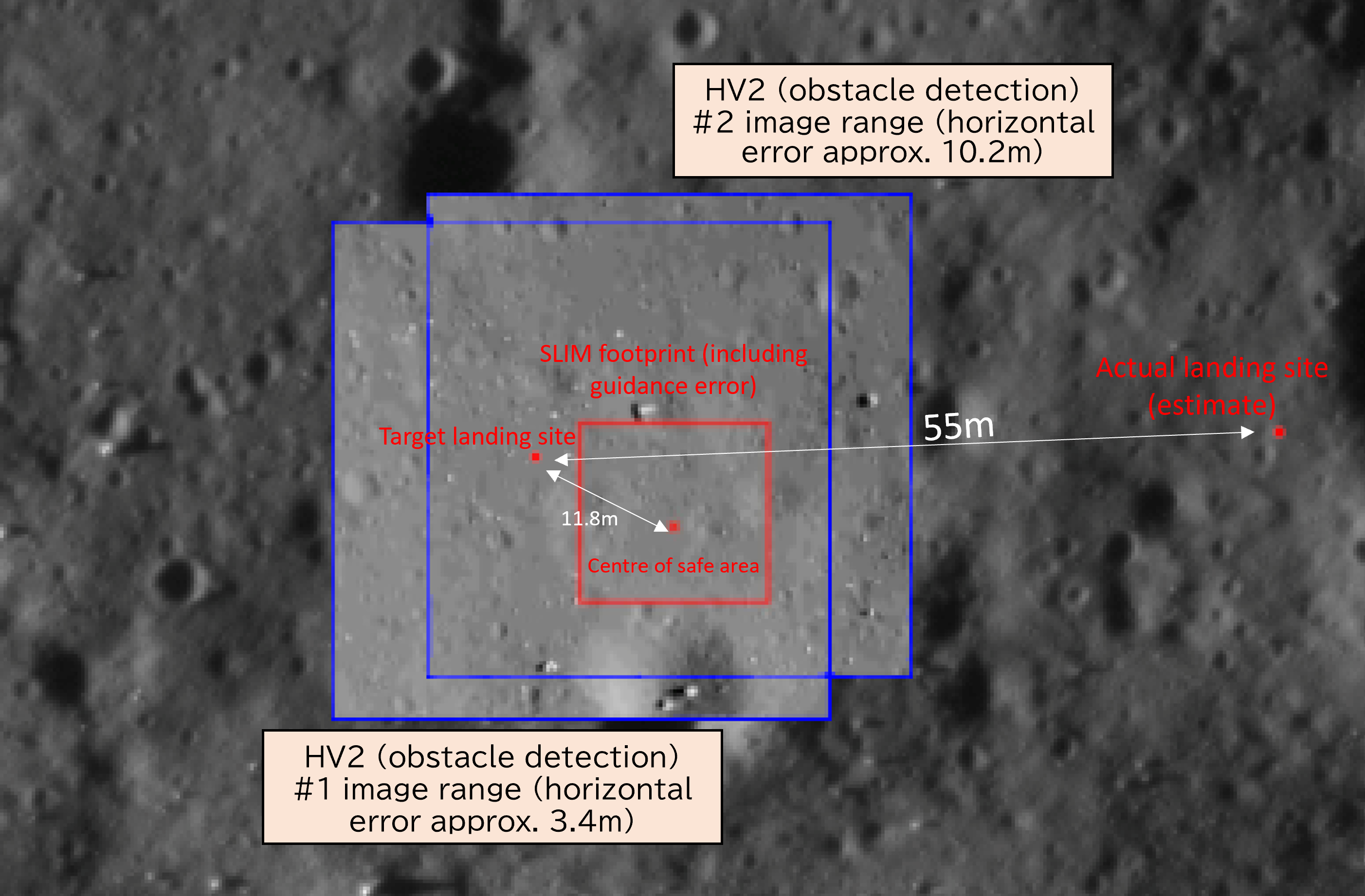
Pese al fallo del motor, SLIM aterrizó a tan solo 55 metros del lugar original de alunizaje, al este del cráter Shioli (13,31549º sur, 25,24889º este). JAXA calcula que la precisión en el aterrizaje gracias a la maniobra de navegación autónoma fue de 3 a 4 metros. De esta forma, SLIM logró alcanzar el objetivo principal de la misión, un alunizaje con una precisión superior a 100 metros. De hecho, se convierte en la nave que ha alunizado con una mayor precisión en la historia. Podemos decir que SLIM ha clavado su alunizaje, literalmente. Por ejemplo, el Apolo 12, que logró aterrizar cerca de la sonda Suerveyor 3, alcanzó una precisión de 163 metros, mientras que la reciente sonda india Chandrayaan 3 debía aterrizar en una elipse de 30 x 15 kilómetros (no hay datos concluyentes sobre la precisión final de las recientes misiones chinas). Para conseguir esta precisión, el sistema de navegación de SLIM analizó las imágenes del terreno en 14 ocasiones.
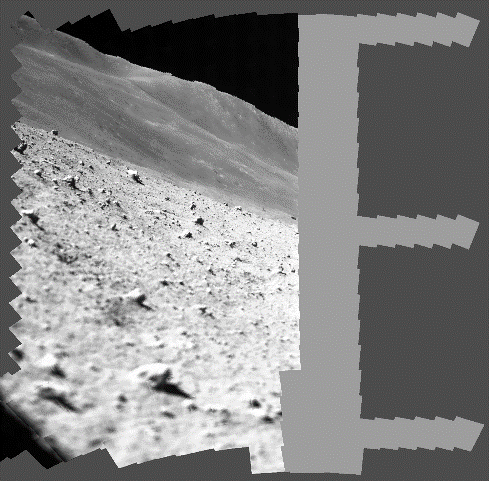
Antes de que se ordenase a la sonda entrar en hibernación a las 17:57 UTC del 19 de enero, SLIM logró enviar datos directamente a la Tierra y, aparte de las imágenes del pequeño LEV-2, la cámara de navegación y la cámara MBC pudieron funcionar. MBC tomó 257 imágenes del terreno circundante y el equipo de la misión ya ha puesto nombres de razas de perros a las rocas que se ven en el paisaje (Kaiken, Bulldog, Shibainu, Akitainu, etc.). La descarga de datos tuvo lugar entre las 15:20 y las 16:30 UTC y también se apagaron los calefactores y equipos secundarios para ahorrar la energía de las baterías. Entre las 16:30 y las 16:50 horas SLIM pasó de comunicarse con la estación principal en Japón a hacerlo con la DSN de la NASA. Luego, entre las 16:50 y las 17:35 UTC, se obtuvieron las observaciones de la cámara MBC (Multi-Band Camera) en modo pancromático (es decir, en blanco y negro; no se pudieron realizar imágenes multiespectrales con los diez filtros por la falta de tiempo antes de que se apagasen los sistemas). A las 17:57 UTC se ordenó desconectar la batería del sistema eléctrico (en ese momento quedaba un 12% de carga).

Tras la rueda de prensa de hoy, está claro que SLIM ha sido bastante más exitosa de lo que parecía tras la ducha de agua fría del pasado viernes. La pequeña sonda ha logrado funcionar en la superficie enviando numerosas imágenes y ha conseguido alcanzar su principal objetivo: un alunizaje de alta precisión (algo que será muy útil para la futura misión conjunta con India, LUPEX, y otras sondas relacionadas con el programa Artemisa). Y como bola extra tenemos el éxito de los pequeños robots LEV-1 y LEV-2. Eso sí, la misión ha tenido una vida muy corta y la sonda ha quedado en una posición un tanto… curiosa, cuanto menos. Pero SLIM podría tener un as en la manga. Antes de que se ponga el Sol en la zona de aterrizaje el 1 de febrero, la posición del Sol en el cielo habrá cambiado y los paneles solares estarán lo suficientemente iluminados como para intentar que la sonda resucite. Por ahora la JAXA no se rinde y SLIM tampoco.
Jajaja esperemos que la próxima sea un alunizaje más tradicional ????
Outch!
Una aspirina para Slim?
Un honor Maestro, que me nombres en la entrada, pero los aportes buenos los hicieron tú y David B…
Hay que sumar que el Ingenuity está para jubilar, tiene una aspa con una punta rota y la NASA ha dicho que volar no volará más.
SLIM VULEVE a demostrar que la JAXA en misiones tecnologícas es la repera, a pesar de haber tenido algunos fallos…
En coste-beneficio de sus misiones para mí solo es superado por la ISRO…
Y está tecnología de aterrizaje de precisión, será VITAL si queremos hacer una base Lunar…
A mí 14m/s me sigue pareciendo una velocidad altísima para tocar suelo.
Creo que es un errata, en otro lado vi que eran 1,4 m/s
En Control de misión (Youtube) se dijo que era 1,4 m/s
Es 1,4 m/s según los documentos de la JAXA. La coma no apareció 😉
Ojalá se haya captado algun video de un salto de LEV-1 y de la bolita «juguetona» 😉 desplazandose por el regolito Lunar…
La posición en que quedó SLIM me hizo acordar a la imagen emblema de la vieja película «Le Voyage dans la Lune».
https://es.wikipedia.org/wiki/Viaje_a_la_Luna
Pudo haber «rolado» de mas en ese giro de 90° que tenia planificado?
Y cuidado con el robot bolita, que puede ser un Decepticon!
Gracias Daniel por el informe.
A mi me recuerda a la sección de inicio del KSP !Muna o Revienta! xD.
De verdad esta gente tiene una capacidad de ingeniárselas y una suerte (buena y mala al mismo tiempo) envidiable jajaja. A pesar del poco retorno científico que pueda tener esta misión, sin duda la demostración tecnológica está servida y es igualmente importante de cara a la exploración y colonización de la luna. Tanto por la maniobra de precisión como por la posibilidad de enviar sondas de reconocimiento tan pequeñas y relativamente baratas. Yo también considero esta misión un éxito a pesar de lo «aparatoso» del tochdown jajaja.
Quedamos a la espera de ver si estos días le llega suficiente luz para que se despierte al menos para decirnos adiós, estoy seguro que Daniel se está preparando un articulazo sobre la retirada con honores que tuvimos en Marte con uno de mayores demostradores tecnológicos que han habido en la Historia, el pequeño Ingenuity
Muy buen titulo para esta entrada. Y muy buena la explicación de lo sucedido y los antecedentes históricos de otros saltadores y alunizadores.
???
¿Podrá enderezarse con un “golpe de encendido corrector de posición?
Para dejar de hacer el pino, digo.
??
Los maestros de la robótica no le instalaron un brazo mecánico para que pudiera reorientarse en caso de vuelco. Cosas que no se explican!!!!
Y las patas de araña típica para un terreno Irregular???
La misión iba justo de probar alternativas a lo que propones (y gastándose poco) como añadido al objetivo principal de probar los sistemas de guía para el aterrizaje preciso (de allí que no sea retórica que la misión haya sido principalmente un éxito). Puedes leer las entradas anteriores de Daniel sobre la sonda.
esto es muy Kerbal…. cuando la pata se rompe..y quedan de costado.
varias preguntas…
apollo 13 ¿iba a ser de «precision»? (y apollo 14…creo que lo era… pero en la practica no fue tan presiso, y 15 -17 no importo mucho)
¿son nombres de perros? shiba inu…los demas no los conosco
Si pudiesen acceder al control de la tobera, un empuje de una fracción de segundo quizás podría poner en funcionamiento la tercera ley de Newton ? total, no debe pesar mucho en la Luna.
O que el robot LEV le de un empujón ?
Ese es muy pequeño (ni los dos a la vez son capaces de tumbarle)
No podemos esperar un golpe de viento.
Algunos nos hemos reído con este alunizaje de cabeza y con su carga de robots que parecen juguetes, pero la verdad es que ha sido todo un éxito está misión, con tres sondas por una funcionando en la superficie de la Luna a la vez.?
Coincido, Fisivi. La misión ha sido un éxito casi total. Eso sí, la JAXA se va a tener que replantear lo de esos motores y rediseñarlos, lo que ha pasado con esa tobera no es normal.
Por lo demás, hay que felicitar a los desarrolladores del software de control de vuelo y a la empresa de juguetes que construyó los robotitos. Creo que tengo en algún sitio alguna de esas pequeñas bolas-robot de juguete “bakugan” de cuando mi hijo era pequeño y que venían en los paquetes de burguer de McDonals (ahora prefiere ejercitarse en el gimnasio ??). Voy a ver si las encuentro y las pongo en un lugar destacado de mi pequeño museo tecnológico.
Ahora vamos a hacer un ejercicio de imaginación espaciotrastornada, sumando la tecnología de este tipo de robots con las crecientes capacidades de control de enjambres de drones y el desarrollo de IA autónomas que estamos viviendo…
Año 2059. Lugar, Marte, Ganimedes, Europa o Calixto, a elegir. Una nave nodriza de 10 toneladas controlada por una inteligencia artificial suelta desde la órbita de cualquiera de esos mundos un lander que antes de aterrizar despliega un enjambre de varias decenas de robots rodantes y aéreos… El éxito de la misión “Bakugan” es tal que durante la posterior rueda de prensa ni los responsables japoneses de la misma ni los periodistas presentes pueden ocultar su entusiasmo, como atestigua este impresionante documento gráfico:
https://estaticos-cdn.prensaiberica.es/clip/a6f610a2-2ffc-4fde-b19b-1970c7bd0d0b_alta-libre-aspect-ratio_default_0.jpg
???
La expresividad japonesa nos es incomprensible. Supongo que están eufóricos?
Como el humorista Eugenio, que en una de sus actuaciones apareció con su cara de estaca habitual diciendo: aunque ustedes no se lo crean, estoy muy contento.
Solo los que conocieran a este personaje entenderán la gracia.
Eugenio, un gran humorista con una vida marcada por su propia tragedia personal, a la que se enfrentó haciendo reír a los demás, con un eterno cigarrillo en unaano y un whisky en la otra. El hombre que sólo se reía cuando cobraba y que siempre empezaba sus chistes con su famosísimo «Saben aquell que diu…»
Por cierto, hay una película sobre él, Tengo que verla.
Yo discrepo en lo de éxito. ¿Tan bajo vamos a poner el listón?
Ha soltado los robots, que han funcionado, su software he cumplido y compensado un fallo estructural y ha logrado alunizar, a lo que se ve de una pieza. Era una misión experimental en la que cabía que se espetara contra el suelo y se convirtiese en chatarra. Incluso es posible que pueda ser reiniciada.
Yo lo veo un éxito. No al 100% pero sí al 80%.
Además, tú siempre discrepas de algo. ???
También es verdad jaja
Gran artículo del maestro Daniel, y emocionante misión. Creo que JAXA ha tenido pura mala suerte en el alunizaje: casi cualquier posición aleatoria hubiera dejado una mejor orientación de los paneles.
Apuesto a que la empresa de los juguetitos habrá subido en bolsa por las fotos enviadas, curiosa colaboración privada que ojalá dé muchos beneficios para que se anime esta forma de hacer cosas.
Perder un motor no es mala suerte, es que algo no ha ido bien. Hay que analizar cuál ha sido el problema para que no vuelva a suceder.
Amigo Pochi, me refiero a que aun perdiendo esa tobera, la sonda podía haber caído fácilmente en una posición más favorable para recibir luz en las placas solares, pero es que ha caído de cabeza con los paneles prácticamente mirando al suelo, casi como tirar una moneda y que caiga de canto
Pero no ha sido aleatorio. Al parecer, la velocidad lateral y la actitud al contacto estaban por encima del rango previsto y eso pudo ser la causa de la posición alcanzada.
Ah, no conocía ese detalle
Muchas gracias por darnos parte del crédito por la información que nos proporcionaste en realidad tú, Daniel 😉
Una nota: por lo que tengo entendido (y mirando la Luna desde mi balcón cada noche jejej) el 1 de febrero no es que se espere que le llegue a dar mejor el sol, sino que será la puesta de sol en el lugar de aterrizaje. Así que *antes* del 1 de febrero se espera que le dé el sol en los paneles con una orientación suficientemente favorable (si aún funcionan, puede que se haya roto algún contacto con el frío en la orientación en la que están) como para permitirle reiniciarse.
Efectivamente, lo corrijo 😉
Gracias Daniel otra entrada espectacular…
La foto de la tobera en la superficie de la luna me ha dejao loco…
Se puede ver cosas en la superficie de la luma con esa precisión??? teniendo en cuenta el tamaño de la misma…
Donde están las imágenes de los apolo con esa precisión por que las que he visto se ven desde muy arriba y apenas se distinguen trazas de caminatas y elemento del aterrizaje…
Ls foto de la tobera la realizó la misma sonda unos metros por encima, mientras aterrizaba.
ok
gracias….
eso me caudra mas… pensaba que había sido alguna sonda que orbita la luna y por eso me había extrañado…
Esta es la foto desde la órbita del LRO
https://english.kyodonews.net/news/2024/01/6ebb4ae0ef23-nasa-unveils-images-of-japans-slim-moon-probe-after-landing-success.html
Por cierto que la JAXA clone, patente ese SOTFWARE de la Sonda SLIM, porque menuda salvada, ese ordenador, es más bueno que el Pan ejejje….
Me veo a la JAXA vendiendo su WindowSLIM para el resto de Sondas, como programa de base… 😉
Desde luego, esa precisión para cargas está muy bien. Si la carga no es delicada (ej. un envío de bocatas para la base), un aterrizaje movido tampoco es problema. Eso sí, si te entra polvillo lunar, adiós a los bocatas XD.
Me encanta y me asombra que dos «juguetitos» hayan sido capaces de hacer y enviar esas fotos. A ver si hay más empresas de este tipo con ganas de desarrollar cosas así.
También está muy bien, dentro de la mala suerte que han tenido, que hayan podido saber lo del problema con la tobera del motor para poder averiguar qué ha pasado.
Así que la JAXA recibió la foto y sabía perfectamente lo que había pasado con la sonda casi inmediatamente tras el alunizaje, pero no quiso soltar prenda.
Muy mal por ellos.
Nunca juegues al poker con un nipón, Pochimax.
Estarían madurando la posible solución antes de decidir si hacerse el harakiri o celebrarlo.
Son gente seria que se toma su tiempo antes de asumir éxitos o responsabilidades (creo que están buscando al que sujeta las toberas)
Seppukku o como se diga XD
Parecen equivalentes. (Igualmente tremendos)
https://es.wikipedia.org/wiki/Harakiri
El seppuku, harakiri, haraquiri o hara-kiri (腹切 o 腹切り? lit. ‘corte del vientre’) es el ritual de suicidio japonés por desentrañamiento. Formaba parte del bushidō, el código ético de los samuráis y se realizaba de forma voluntaria para morir con honor, en lugar de caer en manos del enemigo y ser torturado, o bien como una forma de pena capital para aquellos que habían cometido serias ofensas o habían sido deshonrados.1
Es que son muy perfecionistas, así que les daba vergüenza que se viera su sonda con el culo al aire. A alguien le habrá costado convencerles?
OFF TOPIC
PDLSpace se lleva los 40 millones del concurso de microlanzador del CDTI. Era previsible.
https://astroaventura.net/aeroespacial/pld-space-gana-el-contrato-para-construir-el-primer-cohete-orbital-espanol/amp/
Os remito a la ampliación del artículo a cargo de nuestro amigo Martín Morala para saber más de esta noticia.
pues a mi me parece falta que sea una subvención que hay que devolver y no sea una inversión.
es una diferencia sutil pero muy importante y un atraso
Off Topic: Estimado Daniel, ahora que la misión del Ingenuity lamentablemente ha llegado a su fin, y teniendo en consideración su éxito e importancia (una nueva forma de hacer exploración en planetas con atmósfera) pienso que a más de uno nos gustaría ver en el blog un resumen sobre toda su misión de 72 vuelos.
https://danielmarin.naukas.com/2021/04/06/todo-listo-para-el-vuelo-de-ingenuity-en-marte/
https://danielmarin.naukas.com/2022/04/12/ingenuity-un-ano-y-25-vuelos-por-el-cielo-de-marte/
https://danielmarin.naukas.com/2022/04/28/ingenuity-sobrevuela-el-paracaidas-de-perseverance/
¿continuará…?
Muchas gracias y buenos cielos!.
—-
Canal Whatsapp Astronomía: https://whatsapp.com/channel/0029VaAnEGi9mrGTUZwWOA1J
Mirando fotografías de la sonda he observado que algunas de las toberas de los impulsores de maniobra no apuntan alineadas con el eje de la misma, sino con una ligera desviación lateral.
Si la sonda recupera energía con los paneles solares quizás exista alguna posibilidad de tumbarla accionando esos impulsores. (Propelentes tiene de sobra).
Mirando la primera representación del módulo posado de este PDF, apuesto a que los dos impulsores laterales de la parte inferior podrían servir. (Idealmente combinados con alguno de los otros para empujarlo en la dirección correcta, eso se los dejamos al ordenador de a bordo que parece tener buenas aptitudes).
https://global.jaxa.jp/countdown/slim/SLIM-mediakit-EN_2310.pdf
He leído que la sonda ya está operando.
Sabéis algo??