

El pasado 19 de diciembre tuvo lugar en la Estación Espacial Internacional (ISS) el paseo espacial EVA-63 con los cosmonautas Alexéi Ovchinin e Iván Vágner, miembros de la Expedición 72. La actividad extravehicular era relativamente rutinaria, pero tenía una novedad muy llamativa y es que los cosmonautas usaron el brazo robot ERA para moverse por el exterior de la estación. ¿Y qué tiene esto de especial? Pues porque los cosmonautas rusos usaron un brazo robot europeo para desplazarse por el exterior de un módulo ruso, un brazo que fue concebido inicialmente para la estación Mir 2 y ahora, décadas después, se ha empleado por primera vez en un momento en el que Roscosmos y la Agencia Espacial Europea (ESA) han roto sus relaciones por completo.

El paseo espacial EVA-63 del segmento ruso de la ISS (VKD-63 por sus siglas en ruso) tuvo una duración de 7 horas y 17 minutos. Ovchinin llevó la escafandra Orlán-MKS nº 5 con rayas rojas y Vágner la nº 4 con rayas azules. Los cosmonautas salieron del módulo Poisk (MIM2), que actualmente sirve como esclusa del segmento ruso, y realizaron varias tareas, siendo la principal la instalación del espectrómetro de rayos X SPIN-X1-MVN en el exterior del módulo Zvezdá. Luego retiraron parte de equipos ya obsoletos situados fuera del módulo Poisk (experimentos Kontrol, Test y Vynoslivost) y los introdujeron en una bolsa. Ovchinin colocó sus pies en la plataforma de trabajo PRM unida al brazo ERA y, una vez estuvo a cierta distancia, soltó la bolsa con los equipos en órbita. Durante el paseo, el brazo estuvo controlado por Alexánder Gorbunov mediante el panel situado dentro del módulo Nauka. De hecho, los cosmonautas también movieron el panel de control externo del brazo ERA, situado en un lateral de Nauka, hasta el extremo del mismo módulo, cerca del módulo Prichal.


Aunque esto pueda parecer una imprudencia por contribuir al aumento de la basura espacial, la realidad es que estos equipos han estado expuestos a propergoles de las naves de carga Progress que se acoplan con el módulo Poisk (actualmente está acoplada la Progress MS-29) y meterlos dentro de la estación puede ocasionar problemas de salud (evidentemente, la comodidad de soltarlos en órbita sin más es un factor a tener en cuenta). En cualquier caso, es una práctica común en los paseos espaciales rusos. Para soltar la bolsa con los equipos, Ovchinin apuntó hacia el sentido opuesto al avance de la estación en órbita y con un ángulo hacia arriba de 30º. Al empujarlo hacia atrás, su velocidad será inferior a la de la estación y facilitará su reentrada al reducir un poco su perigeo. Lanzarlo con un ángulo hacia arriba puede parecer contraintuitivo, pero se hace porque al estar en una órbita ligeramente superior, su velocidad será menor y no adelantará a la estación, cosa que haría si se lanza en ángulo hacia la Tierra. Cosas de la mecánica orbital.



El asunto es que esta es la primera vez que se usa el brazo europeo ERA para mover cosmonautas por el exterior de la estación de forma operativa. ERA (European Robotic Arm) nació en los años 80 como HERA (Hermes Robot Arm), un brazo robot para el transbordador Hermes europeo a cargo de la empresa aeronáutica holandesa Fokker. Cuando este fue cancelado, en 1993 la ESA decidió usar una versión rediseñada del mismo, ahora llamada ERA, para la estación rusa Mir 2. Y, cuando la Mir 2 se unió con la estación Freedom estadounidense en 1995 para dar lugar a la ISS, ERA pasó a formar parte del proyecto. ERA tenía que haber viajado en el módulo ruso SPP (Science and Power Platform) en 1999 a bordo del shuttle de la NASA, pero cuando módulo fue cancelado el brazo se quedó en tierra a la espera de encontrar un billete al espacio. Se sugirió mandarlo en el transbordador estadounidense o en otro módulo, pero estos planes tampoco salieron adelante.






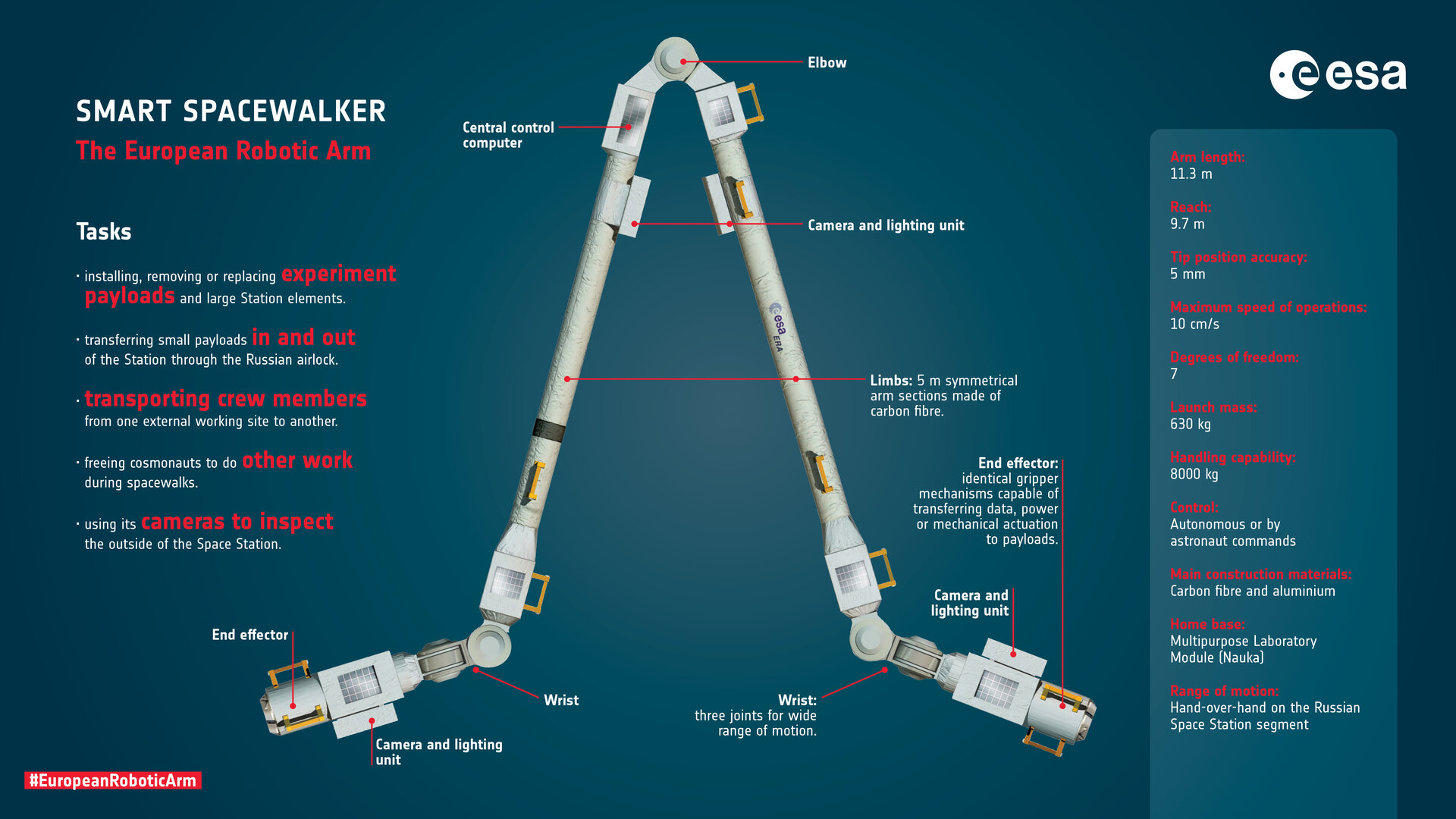
Cuando fue concebido, ERA usaba un diseño novedoso similar al Canadarm 2 del segmento estadounidense de la ISS que le permite moverse por diversos puntos de apoyo de la estación como si fuera un gusano. ERA tiene una longitud de 11,3 metros y una masa de 619 kg, siendo capaz de mover elementos de hasta 8 toneladas. Dispone de tres articulaciones principales, como el Canadarm 2 (SSRMS en la jerga de la NASA), aunque el brazo canadiense es más largo (17,6 metros) y puede mover hasta 11,6 toneladas. ERA fue concebido para ser el segundo de los tres brazos robot de la ISS, después del Canadarm 2 y el brazo robot japonés JEMRMS del módulo Kibo, el gran olvidado de la historia de la estación. Sin embargo, el brazo robot japonés llegaría antes a la ISS. El brazo nipón es un poco más pequeño que ERA, 9,9 metros, y, aunque su masa es mayor (757 kg), solo puede mover hasta 7 toneladas. Sea como sea, el JEMRMS es fijo y se usa para mover cargas desde la esclusa de Kibo hasta la plataforma externa, así que no se puede mover por la estación como el Candarm 2 y el ERA y tampoco fue concebido para desplazar astronautas. Roscosmos (antes Rosaviacosmos) mostró interés en ERA precisamente por esta capacidad, ya que los cosmonautas soviéticos y rusos habían usado hasta entonces brazos mecánicos Strelá para moverse por la Mir y la ISS, en realidad más grúas telescópicas de accionamiento manual muy diferentes de brazos articulados. Por contra, la NASA estaba acostumbrada a usar el Candarm del transbordador espacial para llevar a un lado a otro a sus astronautas durante los paseos espaciales.





Por estos motivos, aunque la construcción de ERA finalizó en 2002, el brazo languideció en tierra hasta que se decidió lanzarlo en el módulo Nauka (MLM), que sufrió numerosos retrasos. Nauka despegó finalmente el 21 de julio de 2021 y se acopló tras varios problemas con el módulo Zvezdá 8 días más tarde. En febrero de 2022 Rusia invadió Ucrania y la ESA decidió cortar todas las relaciones con Roscosmos, dejando las operaciones de ERA en un extraño limbo jurídico y de relaciones públicas. No obstante, el 18 y el 28 de abril de 2022 Oleg Artemyev y Denis Matveiev realizaron dos paseos espaciales para permitir que ERA se pudiese desplazar por la estación. Durante el último paseo de la pareja, la VKD-53 (7 horas y 42 minutos de duración), el brazo robot se movió en el espacio por primera vez tras décadas de espera. Bajo supervisión de los dos cosmonautas, ERA se desplazó por los puntos de agarre del módulo Nauka poniendo a prueba su capacidad de maniobra.



Una vez liberado, ERA demostró su utilidad realizando su primera misión: la instalación del radiador y la esclusa ShK en el exterior del módulo Nauka. Esta esclusa, diseñada para exponer experimentos al vacío del espacio desde el interior del módulo Nauka, estaba «aparcada» junto al radiador en el exterior del módulo Rassvet desde que este módulo se acopló con la estación en mayo de 2010 durante la misión STS-132 Atlantis. El radiador fue transferido desde el módulo Rassvet al Nauka el 18 de abril de 2023 durante el paseo espacial VKD-56 (7 horas y 55 minutos de duración), a cargo de Serguéi Prokopyev y Dmitri Petelin. Posteriormente, el 3 de mayo, ERA movió la esclusa desde el módulo Rassvet hasta el Nauka y lo acopló en el puerto andrógino lateral de este último (ERA necesitó un adaptador usado para los brazos mecánicos Strelá para poder llegar hasta el módulo). El movimiento estuvo supervisado, una vez más, por los cosmonautas Prokopyev y Petelin, que efectuaron la VKD-57 de 7 horas y 11 minutos.



Pero quedaba demostrar la capacidad de ERA para mover cosmonautas por el exterior, no solo equipos. Esa capacidad se demostró el 9 de agosto de 2023, cuando Prokopyev y Petelin efectuaron la VKD-60, de 6 horas y 35 minutos de duración. Una de las tareas de la EVA fue probar la idoneidad de la plataforma de sujeción de los cosmonautas o PRM por sus siglas en ruso, una plataforma que también llevaba desde 2010 esperando al ERA en el exterior del Rassvet. Prokpyev se montó en la PRM y, por primera vez, ERA se usó para mover un cosmonauta, en este caso hacia las cercanías del módulo Rassvet y de vuelta al Nauka.



Tras este paseo espacial VKD-63 podemos decir que, finalmente, el brazo ERA ya está operativo. Paradójicamente, ha tardado tanto en entrar en servicio que China se adelantó con su propio brazo robot, muy similar al ERA y que se usa en la Estación Espacial China. El brazo chino tiene una longitud muy parecida, 10,37 metros, pero su masa es mayor (738 kg) y puede transportar una carga mucho mayor, hasta 25 toneladas. Este brazo fue lanzado en el exterior del módulo Tianhe en 2021 y se usa en combinación con el otro brazo robot de la estación china, de 5 metros de longitud, y que fue lanzado en el módulo Wentian en 2022. Mientras, como hemos visto, los cosmonautas rusos apenas han empleado el ERA en un par de paseos espaciales, los chinos lo han usado en las 17 EVAs que hasta la fecha se han realizado desde esta estación y ya forma parte de las operaciones rutinarias de la estación china. En cualquier caso, lo importante es que ERA ya está operativo tras tantos años de espera.



Momento de la EVA-63 en la que Alexéi Ovchinin, montado en el brazo robot europeo ERA, suelta en órbita una bolsa con equipos obsoletos (no se considera seguro meterlos dentro de la estación por si tienen restos de propergoles y otras sustancias). pic.twitter.com/y0vhOKKzwI
— Daniel Marín (@Eurekablog) December 22, 2024
Muchas gracias Daniel por este completo artículo y por los que has escrito durante el presente año. Agradezco el tiempo que dedicas para compartir tu pasión por esto con nosotros, tus lectores.
Aprovecho para desearles a todos Muy Felices Fiestas y un Muy Próspero 2025!!!. Colmado de buenas noticias de astronomía y astronáutica 😉
Buenos cielos!.
—
Canal Whatsapp Astronomía: https://whatsapp.com/channel/0029VaAnEGi9mrGTUZwWOA1J
Muy buen artículo, muy completo.
Al final parece que se ha impuesto la razón y puede usarse el brazo para lo que se diseñó.
Muy interesante historia del ERA, ¿Creen que reviva el Hermes con la mayor independencia de la Unión Europea?, ¿Con las ansias por liderazgo de parte de Francia?
Bueno de momento la Space Rider, que es lo más parecido que tiene la ESA se supone que debuta este nuevo año…
Veremos…
Sorprende que después de tantos años no haya una manera de almacenar las herramientas en la estación en vez de tirarlas al espacio. El hecho de arrojar la bolsa de las herramientas hacia atrás viene a ser lo mismo que hacerlo a favor del sentido en el que se desplaza la estación. Es una maniobra de seguridad que aleja la bolsa unos metros del vehículo, metros que se incrementan si se impulsa hacia arriba. Aunque la bolsa pesa poco en esa órbita, conserva su masa e inercia. Podría seguir una órbita diferente de la estación o bien pegarse a ella y terminar entrando en la atmósfera. Hace pocos meses una bolsa de herramientas perdida en el espacio fue fotografiada en una trayectoria que la acercaba a la atmósfera.
Daniel, feliz Nochebuena y lo mejor para 2025
Todo el artículo “era” muy interesante pero la perla de como se deshacen de materiales peligrosos me lo ha parecida aún más y nos enseña conceptos inimaginables para los profanos que te/os seguimos con adición en el blog Eureka.
Muchas gracias por tantos regalos y emocionantes noticias ilustradas.
Y gracias por tantos comentarios complementarios de calidad.
Es poco estèético, pero entiendo que lo hacen por posible contaminación con combustibles hipergólicos.
No se puede pegar a la órbita de la estación, se hace de manera que decaiga más rápido que la estación
Marte, desconozco qué es Hermes y que relación tiene con Francia.
Eso sí, Francia es uno de los países líderes y fundacionales de la Unión Europea. El Tratado constitutivo de la Comunidad Económica Europea creó un mercado común entre los seis países participantes (Alemania, Bélgica, Francia, Italia, Luxemburgo y Países Bajos). De los seis países iniciales hemos pasado a 27 miembros, no se incluye Reino Unido que abandonó la UE en 2020. España ingresó en el Mercado Común junto con Portugal en 1986. Mientras que Francia es país fundacional del Tratado desde 1958.
El problema no es que Francia sea país líder de la UE sino si este liderazgo ocasiona fricciones con Italia, España, Alemania, Países Bajos, etc. Lo que ocurra en el futuro nadie lo sabe a ciencia cierta.
Pero si lo ha contado Daniel en su artículo… no puedes decir que no sabes lo que es el Hermes, salvo que no hayas leído el artículo.
Hola Trenchtown! que tal,
Hermes fue el proyecto de transbordador espacial de Europa, entre los 80´s y 90´s. Para mejor información puedes buscar en el blog de Daniel, hay muchos post sobre el
En resumen, Francia fue el país que más lideró el desarrollo de este proyecto y todo se cayó por mayor intromisión de Alemania/Reino Unido (de Reino Unido se entiende que solo se mete para parar proyectos europeos) y pérdida de soberanía de Europa (ESA).
Los franceses son muy suyos y cuando algo no les interesa el boicot es mayúsculo. El AVE a París, las conexiones de trenes nocturnos con Suiza o la conexión de gas del levante español al centro de Europa son buenos ejemplos. Me los quiero mucho, pero son complicados de cojones.
«Todos estos momentos se perderán como lagrimas en la lluvia»…
De verdad espero que antes de desintegrar la ISS, se haga un plan exhaustivo y detallado de TODO lo que se puede salvar de la majestuosa ISS…
Desde los módulos semi nuevos Kibo y Columbus, hasta este mismo brazo, los paneles solares iROSA que están nuevos, muchas baterías integradas nuevas, ahora un experimiento de Corea del Sur puesto en su exterior, etc…
Me da igual en que estación espacial terminen, sea la de Axiom, Starlab, o la Blue Reef…pero que no terminen desintegrados de forma absurda…
Veremos…
Pues conociendo a algunos lumbreras que mandan en estas cosas… dalos por perdidos…
… aunque también puede ser (especulo 100%) que, con Isaacman «a los mandos», se racionalice un poco más la cosa y se tenga en cuenta lo que comentas.
Veremos…
Joer pues si que tiene poder de «pulso» el brazo robot de la estación China…se nota que la tecnología avanza…
A mi también me asombró que pudiera mover más del doble de masa (25 toneladas) que el Canadaram 2 (11,6 toneladas)
OT: Espectacular y lleno de imágenes preciosas este vídeo de Blue Origin…
https://youtu.be/zvDcuRwMCIE?si=OVjYLRUyPavNm5Fa
Llego el momento del «Despertar de un GIGANTE»…
Se viene una ERA exponencial espacial y Blue será una gran fuerza de este movimiento…
Una de las muchas tecnologías que está trabajando Blue:
https://www.nimbuspowersystems.com/2024/12/11/blue-origin-licenses-nimbus-power-systems-fuel-cell-technology-for-development-of-space-power-systems/
Mi más ferviente deseo de que BO despegue este próximo año 2025.
✨??
Estos si tienen 0 gramos en órbita.
Ansioso por ver a New Glenn poner en orbita sus poderosas 25 toneladas de capacidad,
aunque en el futuro seguramente lleguen a 45 toneladas
Recordando el histórico viaje del Apollo 8 por estas mismas fechas, feliz Navidad a todos los amantes del espacio.
¡¡¡FELIZ NAVIDAD!!!
Para toda la muchachada del Blog.
https://youtu.be/SPAW5_Rz22k?si=SLOFSD9jNyftSoEy
Gracias ?
Muchas felicidades en estas fiestas y pásenlo de lo mejor!
Un abrazo
????✨
Ot : gente hoy 24 de diciembre de 2024 la sonda de la NASA Parker alcanzo un nuevo récord de proximidad y velocidad con el sol se acercó a 6 millones de kilómetros del antro rey increíble esperemos que sobreviva al siguiente perihelio !!
El antro rey XD
El lugar donde habita…
Y ¿ cuál ha sido el récord de velocidad relativo al antro en cuestión?
690.000 km/h
https://www.rtve.es/noticias/20241224/sonda-espacial-parker-nasa-bate-este-martes-su-record-acercamiento-sol/16385031.shtml
Había que desentumecer el brazo.
«(Hoo, yeah, haha)
Finally someone let me out of my cage
Now time for me is nothin’, ‘cause I’m countin’ no age
Now I couldn’t be there, now you shouldn’t be scared
I’m good at repairs, and I’m under each snare»
(‘Clint Eastwood’, Gorillaz)
¡Felicidades, autor y contertulios!
Osea que el pobre radiador, excusa y plataforma estuvo como diez años esperando a Nauka, xd
He tenido que buscar cómo se alimenta el brazo, interesante: se enchufa a la estación por el punto de cogida a la misma.