

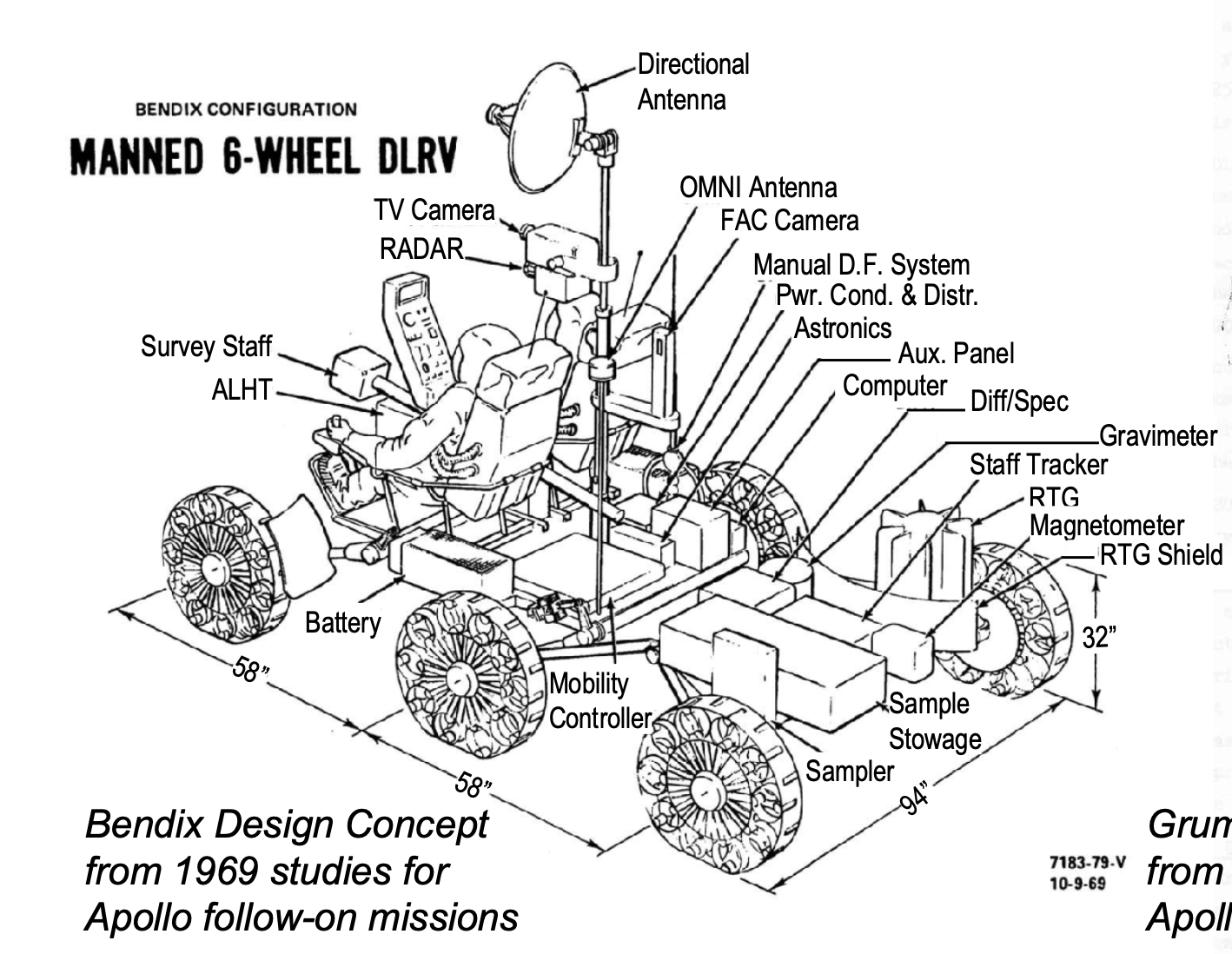
La NASA ha enviado cinco rovers automáticos a Marte, pero sin embargo no ha mandado ninguno a la Luna. Aunque en los años 60 se propuso lanzar alguna sonda capaz de recorrer la superficie de nuestro satélite, estos planes se desecharon para centrarse en el programa Apolo, que ya preveía el estudio de la Luna usando vehículos con ruedas tripulados durante las misiones de Tipo J (Apolo 15, 16 y 17). Por eso el primer rover lunar fue el Lunojod 1 soviético, que alcanzó la Luna en 1970, seguido del Lunokhod 2 en 1973. Desde entonces, solo China ha logrado hacer alunizar con éxito otros dos rovers: Yutu 1 —lanzado en 2013 a bordo de la sonda Chang’e 3— y Yutu 2 —lanzado junto con la sonda Chang’e 4—. Pese a todo, un rover autónomo sigue teniendo sus ventajas, ya que es capaz de estudiar una gran extensión de terreno a un coste relativamente bajo. El problema de cualquier misión que quiera explorar la Luna es la noche lunar: dos semanas de oscuridad y frío que suponen todo un reto tecnológico para cualquier nave espacial que no use energía nuclear. No en vano, los Lunojod soviéticos usaban un calefactor nuclear (RHU) a base de polonio-210 para sobrevivir a la noche selenita, mientras que las sondas chinas Chang’e 3 y 4 hacen uso de un pequeño RTG (generador de radioisótopos) de fabricación rusa —que también sirve como RHU— a base de plutonio-238.

Por este motivo resulta interesante una reciente propuesta de sonda espacial estadounidense denominada Intrepid, un proyecto liderado por Mark Robinson, de la Arizona State University. Intrepid sería un rover de 415 kg —muy por encima de los 140 kg de los Yutu chinos, pero claramente inferior a los casi 850 kg de los Lunojod— y con unas dimensiones de 2,0 x 2,5 metros. Estaría dotado de cuatro ruedas y un RTG de nueva generación capaz de suministrar 300 vatios de energía al comienzo de la misión. Intrepid recorrería la friolera de 1800 kilómetros durante los cuatro años que debe durar su misión primaria. El RTG a base de plutonio-238 también serviría como calefactor RHU durante la gélida noche lunar. Por supuesto, es posible construir un rover que use exclusivamente energía solar que pueda aguantar la noche lunar —ahí están los rovers chinos Yutu 1 y 2—, pero a costa de limitar seriamente el retorno científico que se puede obtener en un intervalo de tiempo dado. De hecho, el equipo de Intrepid ha calculado que una versión del rover con paneles solares necesitaría funcionar tres años adicionales para tener el mismo retorno (o sea, siete años de misión en total).

El rover tendría un diseño que recuerda vagamente al de los rovers marcianos Curiosity y Perseverance, con un mástil en el que iría la cámara y un brazo robot desplegable. Llevaría nueve instrumentos científicos (con una masa total de 30 kg): la cámara TriCam (estéreo y a color), un espectrómetro de rayos gamma para estudiar la composición del regolito lunar, un retrorreflector láser para estudios geodésicos desde la órbita lunar, un detector de partículas de viento solar y rayos cósmicos —denominado ARMAS—, un instrumento para estudiar cómo afectan las partículas del viento solar a la carga electróstática de los vehículos espaciales y, en el extremo del brazo robot, un espectrómetro APXS junto con una cámara para ver en detalle las rocas y el regolito a corta distancia. Teniendo en cuenta que se trata de una misión de tipo New Frontiers —es decir, relativamente cara—, la carga científica se antoja un poco modesta. Quizás se echa de menos un radar para estudiar el subsuelo como el que llevan los rovers Yutu y algún instrumento capaz de analizar la composición del regolito con más detalle, pero parece que se ha primado la velocidad de desplazamiento y la cantidad de terreno a explorar sobre otras consideraciones.


Y es que el objetivo de Intrepid es fascinante: estudiar cientos de kilómetros de la superficie lunar que tienen edades muy diferentes. Pese a las muestras de las misiones Apolo de la NASA y las sondas Luna soviéticas, hay cierta controversia sobre la datación de los distintos episodios geológicos de la historia lunar. La ruta de Intrepid pasa por zonas viejas y jóvenes que tienen casi cuatro mil millones de años de diferencia entre ellas. Intrepid aterrizaría cerca del cráter Reiner Gamma, al oeste del cráter Reiner, en el Oceanus Procellarum (el nombre de la misión está inspirado sin duda en el módulo lunar homónimo del Apolo 12, que también aterrizó en el Océano de las Tormentas), una zona cuya edad se estima ronda los cuatro mil millones de años. Tras pasar 183 días en esta zona, se dirigiría a las colinas Marius, unas estructuras volcánicas únicas en la Luna con una edad de unos tres mil millones de años que en su momento fueron un lugar candidato para las misiones Apolo. Tras estudiar las colinas durante 300 días, Intrepid viajaría por el Oceanus Procellarum investigando zonas cada vez más jóvenes hasta acabar en el cráter Aristarco, con una edad de unos 200 millones de años. De esta forma, Intrepid permitiría comprender mejor la historia de la Luna y, de paso, identificar zonas candidatas para futuras misiones de retorno de muestras.

Intrepid llegaría a la Luna a bordo de uno de las naves que la NASA está desarrollando junto con la industria privada dentro del programa CLPS (pronunciado clips). Durante el día lunar viajaría entre las distintas zonas de interés a una velocidad de 0,5 km/h usando sistemas de navegación autónoma (podrá soportar pendientes de hasta 15º y pasar sobre rocas bastante altas: entre el suelo y el chasis del rover habrá 60 centímetros de altura). Cada cuatro horas —unos dos kilómetros— se pararía para estudiar sus alrededores y documentar su avance. En cada zona de interés permanecería varias horas o días terrestres. La novedad de Intrepid, y la ventaja de usar RTG, es que también podría moverse durante la noche lunar, aunque a una velocidad menor (50 metros por hora) y, en todo caso, solo sería capaz de recorrer un máximo de dos kilómetros.
La idea de un rover lunar con un RTG es ciertamente interesante, pero el interés científico de una sonda de este tipo queda eclipsado por una misión de retorno de muestras. Además, es posible que sea difícil justificar una misión tan costosa cuando ya hay otros proyectos de rovers lunares como VIPER, que además estudiarán una zona más atractiva a priori como es el polo sur lunar y sus depósitos de hielo. Por estos motivos, las posibilidades de Intrepid para salir adelante aumentarán cuando estas misiones ya se hayan completado. O sea, de aquí a diez años. Y eso suponiendo que China, que cuenta un programa de exploración lunar muy ambicioso, no se adelante.
Referencias:
- https://firstmode.com/blog/2019/10/25/designing-intrepid-the-first-lunar-road-trip
El retorno científico de esta misión INTREPID es muy bajo para su costo, solo recorrer por recorrer no tiene sentido. Un ‘Wall-E’ que haga bloques con el regolito lunar y que construya un pirámide, seria mas interesante.
Coincidimos serie más rentable desde el punto de vista científico un Rover teleoperado desde la estación Gateway pero todo indica que están abriendo el paraguas por si se candela ese projeto ojalá me equivoqué
PD saocom 1b en órbital y aparentemente todo funciona perfectamente ????
Cansele quise decir ?
No te preocupes, cansele también está mal escrito y solo es una de las michas faltas ortográficas de tu comentario.
¨Michas¨ faltas veo.
Jesús es que… es un clásico del blog corregir faltas de ortografía cometiendo faltas de ortografía
Cada uno que escriba como bien pueda dentro de sus limitaciones y ya, que nadie está poniendo nota por los comentarios
Tienes razón pero tienes que ser más solidario con los que viven del cuento. El James Webb está finalizando y habrá que inventar otro agujero negro financiero. Así el dinero de los contribuyentes se puede emplear en empresas que hacen como que trabajan.
Esta es una propuesta de una misión tipo ‘New Frontiers’,
me parece que es mas prioritario una misión a Urano y Neptuno
que la de un Rover que solo se mueva por la superficie lunar.
Hola, estoy de vuelta.
«Se ha primado la velocidad de desplazamiento» .. «durante el día lunar viajaría entre las distintas zonas de interés a una velocidad de 0,5 km/h usando sistemas de navegación autónoma». ¡Guau, esto sí que es velocidad!. ¿Cuándo creéis que se podrán construir rovers lunares autónomos más rápidos que un caballo y con una autonomía de 560 km (lo que recorre un Tesla X 100D antes de tener que volverlo a cargar)?.
Por otro lado, acabo de leer muchas entradas previas y se han hablado de cosas interesantes. Lástima que me haya ido de retiro a una cabaña perdida en el monte donde no hay inernet, porque os podría haber aclarado muchísimas cosas. De hecho al estar yo tan lejos de todo, en aquél páramo desolado, me he dado cuenta de que: yo soy el puto amo … soy un ser, prácticamente, omnisciente. Por cierto, tranquilos todos los culés: Messi, «¡se queda!». Ja, ja, ja.
Te faltaba starlink para ser omnisciente.
No Rafa 2, lo que me haría falta es el Neuralink versión 8000000.0, ja, ja, ja. Pero no os desviéis, que todo eso del «puto amo» y del «se queda» es una broma sobre Guardiola, Piqué y Messi. Lo importante ahora es hablar del futuro de los rovers lunares.
Antonio… no te prives y escribe, que las entradas se siguen leyendo aunque vayan quedando atrás
Daniel cómo consigues emocionarme con tus noticias en este blog, sigo diciendo que fue como un milagro dar con este sitio. Gracias.
saludos Jorge m.g.
Es una linda propuesta. La respuesta de la NASA a los Yotu chinos, me gustaría ver un proyecto semejante pero dentro del cráter Occator en Ceres, analizando esas curiosas sales.
1800 Km muy es buena distancia, va a dejar una huella muy extensa en la Luna.
Pues es muy buena idea de todos modos no creo que la NASA lo haga porque seguro su presupuesto será recortado debido ala crisis Poss cororanaviru si tengo que apostar diría que china o talvez la esa asociada con alguna otra agencia espacial ?
… Fer !
Casi no hiciste faltas ! y las que hay, se pasan mejor… Vas por el buen camino… Saludos.
Fernando, usas computadora o celular?
En la NASA primero apuntan al lugar y luego preguntan qué se puede hacer allá.
Vale, es una misión para probar que pueden hacer los rovers más rápidos. De la misma manera que mandan un MOXIE en un rover para mostrar que pueden transformar la atmósfera en algo para respirar.
No, rectifico. Es una misión para determinar posibles recursos interesantes en la luna para una hipotética base lunar. Y para ello necesitan que el rover vaya rápido. El resto de instrumentos son añadidos para añadir valor a la misión, aunque sea secundario. Y el agua ya saben más o menos donde está.
Esta misión hace 40 años, hubiera sido muy interesante.
¿Por qué la luna? Porque los chinos van allá. Y podrían conseguir recursos de algún tipo, por no hablar del prestigio. Y porque está cerca.
A ver … es que es como los chistes. La primera vez te ríes, pero luego, cuando ya te lo han contado 100 veces, ya no. Han enviado rovers, espectrómetros, etc. a Marte y la luna.
No quiero pensar en la cantidad de medidores de viento solar que hay allá arriba. Va a ser diferente de lo que han medido anteriormente? La superficie lunar tiene alguna particularidad que lo hace diferente al viento solar medido en otras partes y otros años?
Claro que es interesante tener un mapa de recursos y que los rovers vayan más rápidos. Pero … tras décadas, uno espera más de la NASA. Me da la impresión de que llegan tarde a los objetivos.
Es una opinión. Que para nada refleja lo que puedan pensar los lectores o participantes.
Pero da igual … es un organismo público y encima de otro país. ¿Qué voy a criticar yo? Debería preocuparme más por que la UE invirtiera más en el espacio y se plantearan objetivos más ambiciosos y tuvieran mayor presupuesto.
Diria que es hora de estandarizar los instrumentos.
Para eso tendríamos que tener programas de bajo coste de exploración sistemática de algún objeto del sistema solar.
Quizá el CLPS lunar se le parece…. ahí la NASA casi que ha rebuscado en el baúl de los trastos a ver qué instrumentos le sobraban para poder enviar a la Luna, jaja.
https://pbs.twimg.com/media/EfpjMMAX0AALlTc?format=jpg
El problema con los instrumentos espaciales es que cuesta mucho sacarlos adelante y cuando salen parece que todavía se les puede hacer mejoras importantes… que a su vez llevan un porrón de tiempo y dinero.
Pero eso, en parte, se hacer. Por ejemplo, yo estoy esperando que la NASA termine de desarrollar el espectrómetro de masas MASPEX, que irá a bordo de la Europa Clipper. ¿por qué? pues porque entonces podríamos hacer una copia para montarlo a bordo de una sonda que estudie los géiseres de Encélado y de forma asequible, en una misión New Frontiers. A su vez MASPEX es un diseño más avanzado del INMS que montaba la Casinni. ¿El problema? incluso con el presupuesto de una Flagship, como el de la Clipper, parece que la NASA no va a ser capaz de construir el instrumento con los parámetros iniciales, así que ya veremos en qué resulta la cosa. Se les estaba yendo el coste de las manos. Una pena.
Para ser honestos… esto no es «la NASA» sino una de las innumerables propuestas que le presentan a la NASA para ver si cuela.
Pero me temo que el listón está muy alto como para que Intrepid llegue a salir adelante.
Base lunar, ¿para qué? Nunca entenderé la necesidad. Es solo cosa política y ver quién la tiene más larga
Hombre, … en un sitio de espaciotrastornados afirmar que «para qué una base lunar» es un poco herejía, no?
Hace 14 años Daniel nos dejaba unas ideas al respecto.
https://danielmarin.naukas.com/2006/12/10/para-que-queremos-una-base-lunar/
Jojo ¡gran hemeroteca!
una base lunar si que es importante, seria el inicio de colonias humanas o roboticas fuera de nuestro planeta y también una base lunar significa el no depender de recursos que se tengan que llevar de la Tierra e iniciar construir allá arriba y no aquí. Con una base lunar las naves espaciales mas a futuro por ejemplo tendrían donde recargar combustible y volver a lo suyo.
Pochimax, a mí me gusta el descubrimiento y la ciencia detrás de cada misión. Cambio cualquier base lunar o marciana por una decena de sondas a las lunas de Júpiter, y Saturno, a Urano, Venus o Neptuno, a los grandes asteroides y planetas enanos o al cinturón de kuiper. Incluso una iniciativa tan verde como la de Starshot me atrae más.
Queramos o no, van a hacer bases lunares, si no es por iniciativa de la NASA será para no quedarse atras de los chinos cuando ellos hagan la propia.
Ademas, tenemos que aprender a vivir en cualquier lado.
Hay que salir de la cuna, ponerse los pantalones largos.
Mandar un rover a la luna…es casi velocidad de escape…¿no?… no se podrian mandar varios «chiquitos»?…
Que tipo de cohete lo podria lansar?
Este rover podría llegar a la Luna montado en un lander Griffin, de Astrobotic. Pero todavía no sabemos cuánto pesa el Griffin ni el cohete que va a lanzarlo con el VIPER, la verdad.
Personalmente tengo mucho interés en las próximas misiones lunares, ver la capacidad TLI del Falcon 9, del Vulcan,… cómo aumentar la masa de las sondas usando viajes no directos a la Luna, etc.
un cohete chiquito
La verdad es que gastar una New Frontiers en una misión lunar… no sé, no lo veo, francamente. Y como bien dice Daniel, encima sin radar de exploración del subsuelo.
La Luna está lo suficientemente cerca como para intentar su exploración con recursos más convencionales, rover con paneles solares (lo único añadirle los calefactores, eso sí).
Por otro lado, el programa CLPS ya prevé hacer aterrizajes en dos puntos del recorrido de este rover, en Reinier Gamma y en el Oceanus Procellarum, así que no lo veo. Claro que primero tienen que alunizar con éxito esas sondas…
https://pbs.twimg.com/media/Efpjc8FXgAEIcy8?format=jpg
Además, el argumento de que este mismo recorrido tardaría tres años más en recorrerse, mediante una sonda con paneles solares, no parece muy convincente… parece factible. (por otro lado, el viaje en sí es fascinante… ver el recorrido del rover, plasmado sobre una foto de la Luna llena, la verdad que impacta)
Os dejo por aquí un recordatorio de cómo están las misiones lunares de la NASA, dentro del programa CLPS. Contando con VIPER ya hay cuatro en marcha y en un par de años se aprobarán otras cuatro.
https://danielmarin.naukas.com/2020/06/13/el-programa-clps-de-la-nasa-sigue-adelante-el-modulo-lunar-griffin-y-el-rover-viper/
Me gusta Intrepid. Como diría HG: hágase!
(cómo? se nos acabó el dinero con tanta sonda que llevamos aprobada? oh, shit!)
Un artículo muy interesante.
Me parece increible la escasez de exploración robótica de la Luna con lo cerca que está. ¿Será porque no hay aerofrenado como en Marte, y por eso temen más el litofrenado?
Le veo una pega por lo de usar RTG, porque depender de recursos terrestres es quizá el mayor problema para exploración espacial «presencial», no telescópica. Con ese robot se dependería de materiales radiactivos que son problemáticos, y caros, de producir y de lanzar desde Tierra, y que tienen una vida limitada.
Pienso que hay, al menos, una alternativa con recursos locales a la energía radiactiva para una sonda, e incluso un rover, para que funcione de noche. La Luna, aun en sus noches tan largas, tiene una fuente de energía inmensa: el intercambio del calor del suelo recibido del sol por el día al radiarse ese calor hacia el espacio vacío por la noche.
Se me ocurre que una sonda o rover que tuviera un depósito para regolito (podría ser inflable y liviano para facilitar su lanzamiento) que actúe como acumulador de calor, con un intercambiador de calor en el interior del depósito, podría absorber calor a través de los paneles solares durante el día y liberar ese calor lentamente durante la noche, pasando por un generador termoeléctrico como los que se usan en los RTG.
Quizá transportar unos cientos de kilos de regolito harían algo más lento a un rover, pero no creo que ese fuera el mayor problema.
El depósito de regolito podría contener las baterías y la electrónica, de modo que su temperatura fuera estable dentro de rangos operativos sin consumir electricidad para calentarlos. Además estarían mucho más protegidos de radiación y micrometeoritos. Quizá hasta permitiría usar una electrónica más barata y potente que la que resiste las condiciones del espacio.
No entiendo cómo proponen semejante idea. ¿No seía mejor un rover sin RTG, sólo con energía solar, sin instrumentos, sólo una pala para recoger regolito, un taladro de broca hueca para tomar muestras de rocas y 3/4 cohetes de retorno de muestras? Así, los científicos podrán estudiarlas en la Tierra, donde se podrán analizar «de verdad»
Compensa más un rover con paneles solares o varios de ellos cargados de instrumentos, aunque tuvieran que parar 14 días -incluso podría compensarse eso en parte mandándolos a distintas partes de la Luna, de modo que uno funcionara mientras el otro descansa- que uno nuclear con no demasiada carga científica.
Al final el dinero es lo de siempre, y teniendo jodido coronavirus para rato ya que hay quien afirma que la vacuna no funcionaría bien más aún. ?
Muy de acuerdo.
Supongo que esta gente necesita vender su experiencia.
Coincido en que esta propuesta va muy escasa de equipamiento científico. Ni siquiera un buen taladro para sacar muestras del subsuelo lunar. Da la impresión de ser un trabajo de fin de grado de estudiantes de universidad que de una propuesta seria. 1.800 km son muchos, pero es que hay lugares mas interesantes en nuestro satélite.
Eso sí, se va notando que EEUU empieza a mirar con preocupación los avances espaciales (mejor dicho, lunares) del Imperio del Centro. Esto empieza a ponerse interesante.
Han preferido primar la velocidad en el desplazamiento que la carga científica que va a llevar. Son sólo 415 kg de rover frente a los 900-1000 kg de Cury o Percy.
Quiero decir, …. es discutible, pero es su propuesta.
No parecen unos novatos, sin embargo.
https://firstmode.com/blog
No, si no digo que sean novatos, faltaría mas. Pero sí que parece una propuesta un tanto digamos improvisada. Ya que propones mandar un rover a la Luna, por lo menos sácale un buen rendimiento científico. Un rover mas grande. Bien equipado, que se asome a uno de esos túneles de lava y eche un ojo, que saque muestras del subsuelo, cosas así. Porque parecen mas interesados en hacer kilómetros que otra cosa.
De todas formas, da lo mismo. Esta propuesta se va al cajón de los PowerPoint.
Sí, tiene pocas posibilidades.
Por lo que veo les han dado un poco de dinero para avanzar la propuesta. Por lo que dicen aquí:
https://asunow.asu.edu/20191028-nasa-awards-asu-funding-develop-new-robotic-lunar-rover-concept
Durante los próximos meses, el equipo de Intrepid analizará detalladamente cómo funcionará el rover y qué estudios de ingeniería se necesitan para madurar el concepto de misión.
“Entre muchas cosas, consideraremos las ventajas y desventajas de un rover de seis ruedas frente a un rover de cuatro ruedas, cuál es la mejor forma de comunicación y si el paquete de instrumentos propuesto es apropiado”, dijo Robinson.»
Claramente tanto la exploración como la creación de base en marte o la luna es necesario tener una fuente de energía.
Para mi lo que hacen es intentar llevar algo nuclear a la luna y que funcione y poco a poco mejorar hasta tener un energía «ilimitada» en las estaciones.
Hace poco leí una batería con residuos nucleares https://newatlas.com/energy/nano-diamond-self-charging-batteries-ndb/ que podría ser interesante.
También estuve pensando, porque no poner varios satélites en la órbita de la luna, cuya función es mandar energía al rover aunque se encuentre en una zona oscura, recabar energía del sol y trasladarla a la ubicación del Rover pasando por otros satélites hermanos… en definitiva transmisión de energía inalámbricamente
Paneles solares y baterías más avanzadas, sí. Eso es lo que necesitamos para las bases lunares permanentes.
Supongamos que el 1% de la Humanidad son espaciotranstornados. Hablo de 70 millones de personas. Supongamos que esas 70 millones de personas están dispuestas a donar 2 dólares al año a la exploración espacial. Serían 140 millones de dólares al año. En 2 años serían 280 millones y en una ventana marciana de 14 meses serían 300 millones aproximadamente. Lo que han hecho los emiratíes de encargar una sonda a una empresa estadounidense y contratar un lanzador japonés podrían hacerlo los aficionados a la astronáutica.
No creo que alcancemos un porcentaje tan grande de la población.
Algo así ya ha sucedido. Y probablemente siga sucediendo.
Buena idea. Yo me encargo de gestionar los 300 millones de dólares… Tengo echado el ojo a un ático de 200 metros cuadrados en Pintor Rosales que sería una sede ideal para el proyecto. ???
Oye por mi parte si son 10 también los pongo.
El poder colaborar en la exploración del espacio es algo que me encantaría.
… $ 2 al año… que para cualquiera de nosotros,( bueno, asi supongo)… No es nada… Imaginate si dieramos dos dolares… Pero mensuales… Siguiria siendo nada en nuestro presupuesto… Pero… 🙂
2 dolares por mes estaria bien. 2 x 12 * 70 millones = 1680 millones anuales.
Y si rifamos un viaje anual al espacio se sumaria mas del 1% de la humanidad.
Ademas, se podrian conseguir sponsors.
De mas esta decir que la administracion deberia ser primorosamente transparente.
En Argentina 2 dolares son 2,5 L de cerveza estandar
La verdad es que todo el proceso es interesante. O sea, esto es una propuesta de misión, la NASA ha aprobado fondos para que desarrollen un poquito el concepto… eso mismo ha otorgado a otras propuestas, 10 en total. Todas ellas son interesantes, claro, desde la red geofísica lunar, la astrobiología de Encélado, el lander para Mercurio o el de Ceres…
https://www.hou.usra.edu/meetings/pmcs2020/format/
A su vez, se presentaron 54 propuestas de concepto, de las que se han aprobado las 10 comentadas.
Lamentablemente no tenemos dinero más que para hacer realidad una parte miserable de las misiones que proponen los científicos.
Una presentación en Youtube, por si alguien quiere profundizar más.
https://www.youtube.com/watch?v=wmKakqNVtMI
En fin…. pensándolo un poco, habría ido mejor si su propuesta fuese con paneles solares, aunqe les lleve más años.
De alguna manera la NASA tiene que abrir camino a la industria para el estudio sistemático de la Luna. Para eso hace falta seguir la filosofía del CLPS, así que la idea debería ser desarrollar rover autónomos y con gran capacidad de desplazamiento, como este, pero que sean asequibles.
Un rover New Frontiers y con energía nuclear no me parece el camino a seguir en la Luna.
A mí es que a estas alturas enviar Rovers de uno en uno a la luna me parece…cuanto menos ridículo.
Cuál es la idea? Recabar datos de muchas zonas distintas? Se van a hacer las mismas mediciones en todas las zonas?
Pues entonces no sería mejor plantear una flotilla de varias decenas de Rovers fabricados en serie, idénticos, con paneles y mucho más sencillos (no necesitarían recorrer tanto) y baratos?
Podríamos obtener muchos más datos de muchas más zonas, y que mientras unos están en sombra, trabajen los otros.
Y aunque a nivel de sensores no fuera muy avanzada, una misión así, por su amplitud sí sería una digna New frontiers.
Es una opción. El problema es que no veo una New Frontiers en la Luna, no sé.
Yo pensaba en que la NASA desarrollara un rover con capacidad futura comercial. O sea, que una vez financiado el desarrollo de uno (o dos) tipos de rover, las empresas X e Y siguieran con su comercialización, una vez demostrada su operatividad. Más o menos siguiendo la filosofía comercial actual.
No sé si todavía estamos lejos de que empresas privadas, fondos de inversión, etc. estén por la labor de querer invertir en conocimiento de la Luna (¿para futura minería?) quizá estamos a décadas de eso.
Otra opción es seguir con el CLPS. Astrobotic te cobra 4.5 millones de $ por un kg de carga de pago montado en su CubeRover… Te ofrece 10 kbps de comunicaciones y 0.5 W (muy justito, si quieres más, tienes que pagar más)
https://www.astrobotic.com/planetary-mobility
No sabemos hasta dónde va a llevarnos esto del CLPS o si el primer litofrenado también va a hacernos chocar con la realidad de que space is hard.
El pdf con la guía de usuario del CubeRover
https://www.astrobotic.com/cuberover-payload-user-guide
No me digas que las ruedas del CubeRover este no parecen chapas de botellín de cerveza! ?
Con todos los respetos, parece diseñado por un niño con dos palillos, una caja de cerillas y 4 chapas!?
La verdad es que un cuberover podría ir dentro de una rueda de Curiosity.
O incluso más de uno, ja ja
https://twitter.com/astrobotic/status/973544497987686400
Hombre, espero que a estas alturas, la Nasa ya tenga un poco controlado el tema del litofrenado…¿no escacharraron ningún Apollo no??
En cualquier caso alunizar no es fácil pero tampoco sé qué tasa.de alunizajes exitosos vs litofrenados ha habido en total.
Buena idea. Además al final de su vida util podrían reciclarse algunos de sus componentes como los paneles solares. Para qué enviarlos de nuevo en un futuro asentamiento.
Ha y algo que no me cuadra???
Si la NASA pretende volver a la luna en 2024 (astronautas pisando la luna) porque mejo no aprovechar el impulso (y recursos) para hacer una versión actualizada del rover para misiones Apolo prolongadas dotado de RTG…
Yo opino igual que Zener y dejaría este rover para cuerpos celestes «mas inalcanzables» como Ceres…
La verdad yo me quedo con el Centauro ruso, mola mas:
https://arstechnica.com/science/2019/10/russia-wants-to-remove-space-robots-legs-give-it-wheels-send-it-to-the-moon/
…que conste que puse una fuente mas digerible para todo 😀 😀 😀
y aquí el enlace mas reciente sobre el tema:
enlace1: mundo.sputniknews.com/espacio/202008071092342509-roscosmos-se-propone-eclipsar-a-spacex-con-un-lanzador-espacial-para-100-misiones/
enlace2: mundo.sputniknews.com/espacio/202007271092222600-los-robots-rusos-y-su-futuro-en-el-espacio/
Saludos!
Todo a su tiempo. Los futuros rover tripulados quiere la NASA que también tengan conducción autónoma para aprovecharlos cuando no haya astronautas.
Pero será en siguientes versiones, creo yo.
De todas formas, lo del alunizaje en 2024 es inverosímil.
Concuerdo completamente!
Saludos!
El Centauro ruso mola mas, sobre todo impreso en cartulina satinada.
bueno depende:
si lo que quieres es decorar tu sala no te lo discuto, si se veria muy bien satinado por la escala de grises…
pero si es para fines didacticos, mejor se veria este poster, que sin duda alguna mola mas:
https://cdnimg.rg.ru/pril/article/178/15/83/infa.jpg
…no te voy a durar toda la vida tocayo, saludos!
😀 😀 😀
MUy bonito el grafico
Lastima que esta en cirilico
Puedo hacerle OCR y despues pasarlo por deepl.com
Aquí esta una traducción, sobre el articulo completo donde aparece el grafico:
Fedor y sus hijos
¿Por qué se necesitan avatares robóticos en el espacio?
¿Cuál es la parte más inútil de un robot en el espacio exterior? ¿Qué tipo de centauro mecánico atravesará la luna? ¿Qué pruebas atraviesan los «cibernéticos» antes de que se les permita entrar en órbita?
La robótica espacial está ganando impulso rápidamente. Diseñadores, ingenieros, cosmonautas hablaron sobre sus perspectivas en una mesa redonda en el TsPK Yuri Gagarin en Star City. El punto de partida fueron los resultados del trabajo en la ISS del primer robot-avatar ruso «Fedor» (o, como también se le llamó, Skybot F-850), creado por NPO Android Technics junto con el Fondo de Investigación Avanzada.
Permítanos recordarle que Fedor voló a la órbita como parte de un lanzamiento de prueba de la nave espacial Soyuz MS-14 mejorada y el vehículo de lanzamiento Soyuz-2.1a. No había gente a bordo. Tenía que «aburrirse» como una «carga útil» solitaria.
Hubo algunas aventuras en la propia estación. Y el barco aterrizó en el segundo intento. Y el avatar no se conectó de inmediato. Pero por eso es un experimento, para comprobar y perfeccionar todo …
«Fedor» era bueno manejando un taladro, un destornillador. E incluso ensambló una estructura eléctrica a partir de piezas, para lo cual conectó contactos y conectores. También sirvió una toalla. El robot tiene 42 grados de movilidad: cabeza, cuello, hombros, codos, manos y dedos. En gravedad cero, se practicaban principalmente las habilidades motoras finas.
A distancia, el androide estaba controlado por el cosmonauta Alexander Skvortsov. Llevaba un exoesqueleto especial que le permite al avatar seguir los movimientos de una persona. Oficialmente, este traje se llama ZUKT: significa «controlador de tipo de copia». Nuestro otro cosmonauta, Alexei Ovchinin, estaba observando lo que hacía Fedor. Yo hable con el.
«Hoy realizamos una serie de trabajos con herramientas a bordo que pueden ser necesarias para actividades extravehiculares. El trabajo con el taladro eléctrico se llevó a cabo bajo la supervisión constante de Alexei Nikolaevich Ovchinin», esta es una de las entradas de Twitter del Skybot F-850.
Como se trataba de un experimento científico, todo se registró estrictamente. Entonces, Ovchinin pasó 29,5 horas trabajando con el avatar, Skvortsov, 28 horas. Los resultados se están analizando ahora. Debo decir que «Fedor» ya no volará al espacio. Al menos en la forma en está forma. Los que volarán, como dijo el director ejecutivo de Roscosmos para programas prometedores y ciencia, Alexander Bloshenko, son «los hijos de Fedor».
Los diseñadores ya están creando un robot especial para resolver problemas en el espacio exterior. El proyecto se llama Teledroid. Por cierto, bromean los expertos: la parte más inútil de un «mecánico» que tendrá que trabajar fuera de la estación son sus piernas. Por lo tanto, los ingenieros de «Teledroid» dotaron el torso de un hombre con solo manos. Dicho robot está diseñado para operar en la superficie exterior del Módulo de Ciencia y Energía de la Estación Espacial Internacional. El lanzamiento del módulo está previsto para 2022. Y la aparición de una estrella trabajadora debería formarse entre marzo y abril de 2020.
Como continuación del experimento esta «Tester», robots similares a Fedor volarán en la nueva nave espacial tripulada Oryol, primero en un vuelo autónomo en órbita alrededor de la Tierra y luego a la ISS. En 2036-2040, está previsto crear un robot humanoide completamente nuevo, en el marco del proyecto «Tester 2.0». Y su envío a la base lunar rusa. Antes de eso, en 2031-2035, se propone lanzar una especie de «Centauro» en la luna: un robot con una parte superior humanoide y un chasis en lugar de piernas. Este proyecto se denominó «Rover-AT».
En 2031-2035, se propone implementar la segunda etapa de trabajo dentro del proyecto Teledroid: Teledroid 2.0 se diseñará para trabajar en la superficie de la estación lunar.
Algunos científicos argumentan: solo los autómatas deberían funcionar en el espacio en general, no hay absolutamente ninguna necesidad de arriesgar a una persona. Pero uno de los cosmonautas dijo una vez: «Al ir al espacio exterior había que reemplazar algo. El Centro de Control me dice:» Toma la llave de 14 «. La tomé, y cuando me acerqué al sistema, me di cuenta: la llave debe ser diferente. ¿Completaría el robot mi tarea con una llave 14? No, pero yo si pude hacerlo”. Resulta que no todos los robots no pueden hacerlo todo…
De hecho, aún no se pueden crear robots con inteligencia artificial avanzada, que reemplacen completamente a los humanos en todas las situaciones en el espacio. Y no solo allí, dicen los expertos. Sin embargo, en muchos casos, simplemente no hay alternativa a los robots en el espacio. En primer lugar, se trata de cosas tan peligrosas y laboriosas como, por ejemplo, el mantenimiento de centrales nucleares espaciales en un futuro próximo. ¿Y el trabajo de construcción e instalación para crear bases lunares y planetarias? ¿Y la exploración de asteroides y planetas distantes? …
Pero al mismo tiempo, los robots serán controlados o controlados por humanos. Por lo tanto, ahora se está trabajando activamente para mejorar las interfaces «robot-humano», así como el comportamiento autónomo adaptativo de los robots, la interacción grupal de los robots entre sí.
Los diseñadores son prácticamente unánimes: las máquinas más versátiles para realizar operaciones complejas en el espacio cercano a la Tierra, en la Luna y otros planetas serán avatares humanoides.
En cualquier caso, antes de entrar en órbita, cada «astronauta mecánico» debe superar las pruebas más serias: vacío térmico, resistencia a vibraciones y radiaciones, compatibilidad electromagnética…
En general, todo es como las personas. Y quizás incluso más difícil.
Evgeny Dudorov, director ejecutivo de NPO Android Technics:
– En el Cosmonaut Training Center, presentamos una visión sobre el desarrollo de tecnologías de robótica espacial para el futuro hasta aproximadamente 2050. Hoja de ruta preliminar. Ahora estamos formando un concepto, donde ya se describirá en detalle qué y cómo vemos. Pero esta es nuestra visión puramente de ingeniería. Involucraremos a varias empresas, desarrolladores en robótica y naves espaciales, de modo que estemos en un solo tándem.
Hasta el 90 por ciento de todas las operaciones que realiza un astronauta fuera de la estación las puede realizar un robot en modo copia, controlado desde un mando a distancia o de forma autónoma. El primer prototipo de un robot tecnológico y de transporte espacial se desarrolló en el proyecto Kosmorobot. Las primeras muestras de robots antropomórficos con fines espaciales aparecerán en dos proyectos: Teledroid y Tester. Los términos de referencia ya han sido desarrollados y firmados por RSC Energia y TsNIIMash. De acuerdo con Roscosmos.
Naturalmente, coordinaremos el concepto en sí con Roskosmos. Lo más probable es que los expertos de la industria agreguen o corrijan algo propio. ¿Por qué? Vemos el desarrollo de la robótica, su aplicación en órbita cercana a la Tierra, en la Luna y Marte. En cuanto a la exploración de los planetas, hay muchas tareas diferentes: relacionadas con la extracción de minerales, la construcción de varios módulos, mantenimiento, etc. Debemos registrar todo esto. Acordar cómo y qué robótica se entregará. Hablando específicamente de la Luna, es muy importante incluso en qué parte de la Luna se utilizarán estos dispositivos.
¿De qué materiales estarán hechos los robots para el espacio exterior?
– Los productos metálicos están hechos principalmente de determinadas marcas de aluminio. Si se trata de productos de plástico, generalmente se usa Ultem allí. Ahora hemos desarrollado nuestros propios motores y acabaremos de obtener la certificación para su uso en el espacio. La nomenclatura tendrá alrededor de 3 mil elementos diferentes. Se trata de todo tipo de tornillos, cables, placas electrónicas, etc.
Diccionario:
Косморобот: Cosmorobot
Испытатель: Tester
Теледроид: Teledroide
Ровер‑АТ «Кентавр»: Rover-AT «Centauro»
Международная Космическая Станция (МКС): Estación Espacial Internacional
Лунная Oрбитальная Cтанция (ЛOC): Estación Orbital Lunar
Лунная База (ЛБ): Base Lunar
Enlace: rg.ru/2019/11/19/zachem-v-kosmose-nuzhny-roboty-avatary.html
Gracias por la traduccion
Pero me referia a los textos del grafico
Ah, ok, ya encontre los textos del grafico
SN6 a punto de despegar
https://www.youtube.com/watch?v=HH4naislrp8
Maldicion, abortado. Faltaban 5 minutos.
Dicen que la velocidad del viento es muy alta
¿no se suponía que Starship iba a poder despegar y aterrizar en casi cualquier tipo de condiciones meteorológicas?
Empezamos bien…
Bueno toma en cuenta que es un pseudo-prototipo…
😀 😀 😀
… Verdad Julio, bien pseudo-pseudo… prototipo… Saludos…
😛
Y tú no dices que esto no son Starship?? Entonces porque pides que hagan lo que una Starship?
Jeje buena respuesta.
OT.
Pochi,
He intentado inscribirme en Sondas Espaciales… Lleno todo y me dice que me envia algo a mi correo, para confirmar… que jamas recibo he intentado reinscribirme y dice que esa direccion ya la utilisa otro usuario ( yo mismo) he enviado lo de se me olvido mi contrasena, y lo mismo me dice que me envia a mi correo, un codigo me imagino… pero no recibo nada! Gracias por tu ayuda, de antemano… Saludos.
Pues no sé que estará pasando Alberto A, porque otras veces han quedado los usuarios atascados en pendientes, pero ahora mismo no hay ninguno…esperemos que Pedro lea este mensaje, y vea si hay algún fallo con la web…
saludos, si quieres intentarlo de nuevo con otro correo…
Vaya… tampoco te he visto en pendientes.
Trasteo mañana un poco, aunque me cuesta horror entender las herramientas dsas del foro
jaja parece el sistema de Yahoo
Un prototipo con un solo motor descentrado no se puede considerar una Starship hecha y derecha.
No, esta bien que hayan hecho eso. Porque si se actua con viento fuerte, al comparar comandos enviados contra acciones realizadas por el aparato puede parecer que no hay correspondencia, que el impulso vectorial o los rcs estan fallando, y solo es que el viento esta agregando o quitando impulso. Es decir, para probar algo hay que simplificar el escenario y el viento en este caso es un invitado indeseado. Cuando llegue el momento de probar las prestaciones contra todo tiempo se elegira un dia lluvioso, con nevadas o huracanes.