

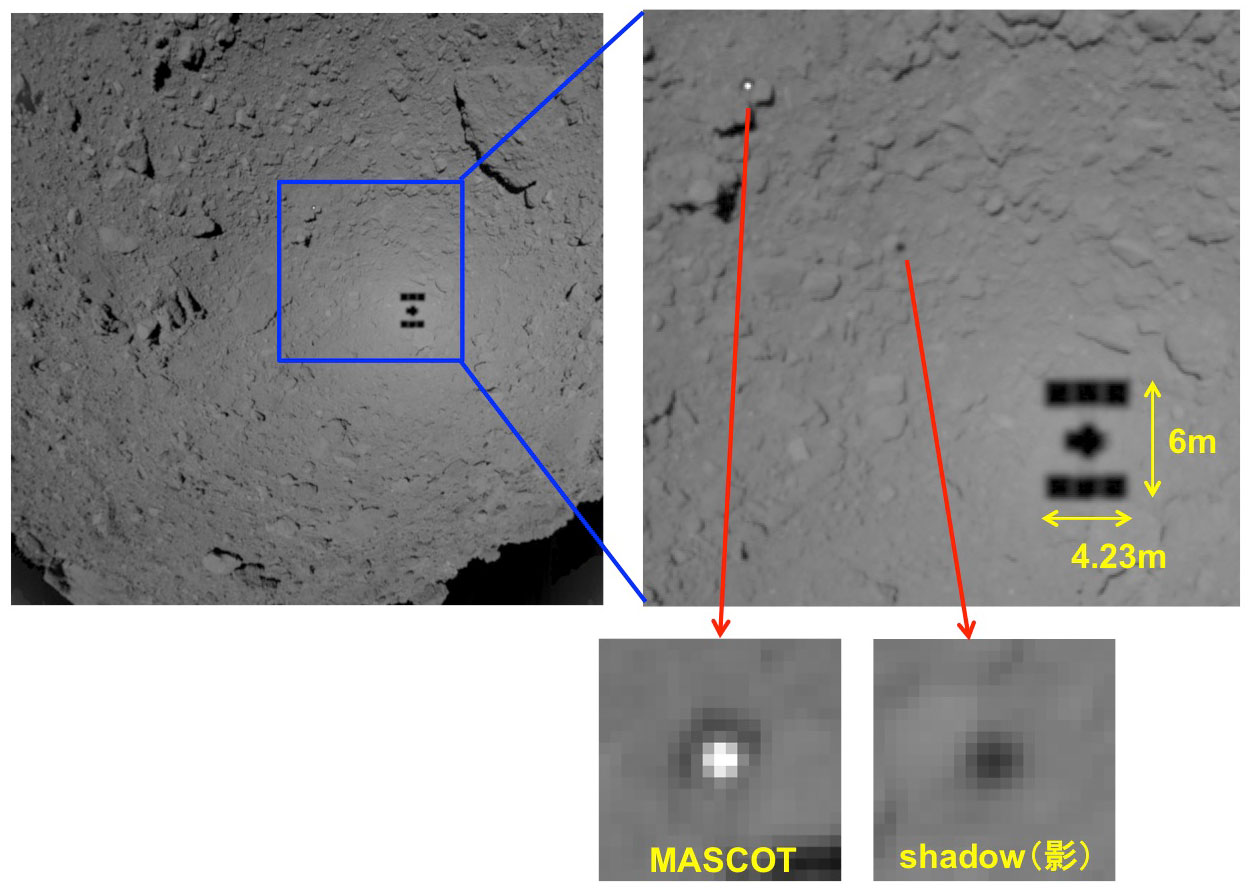
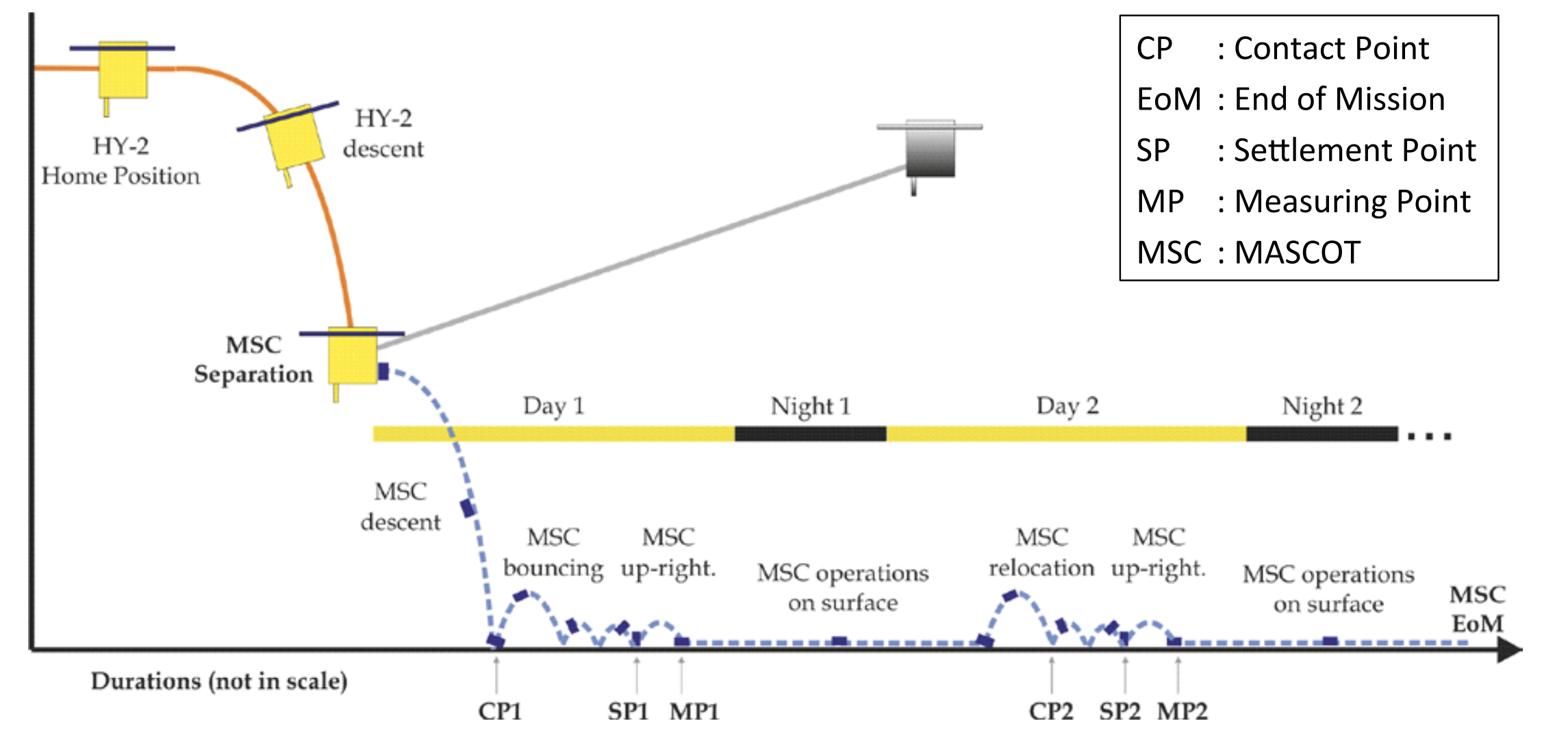
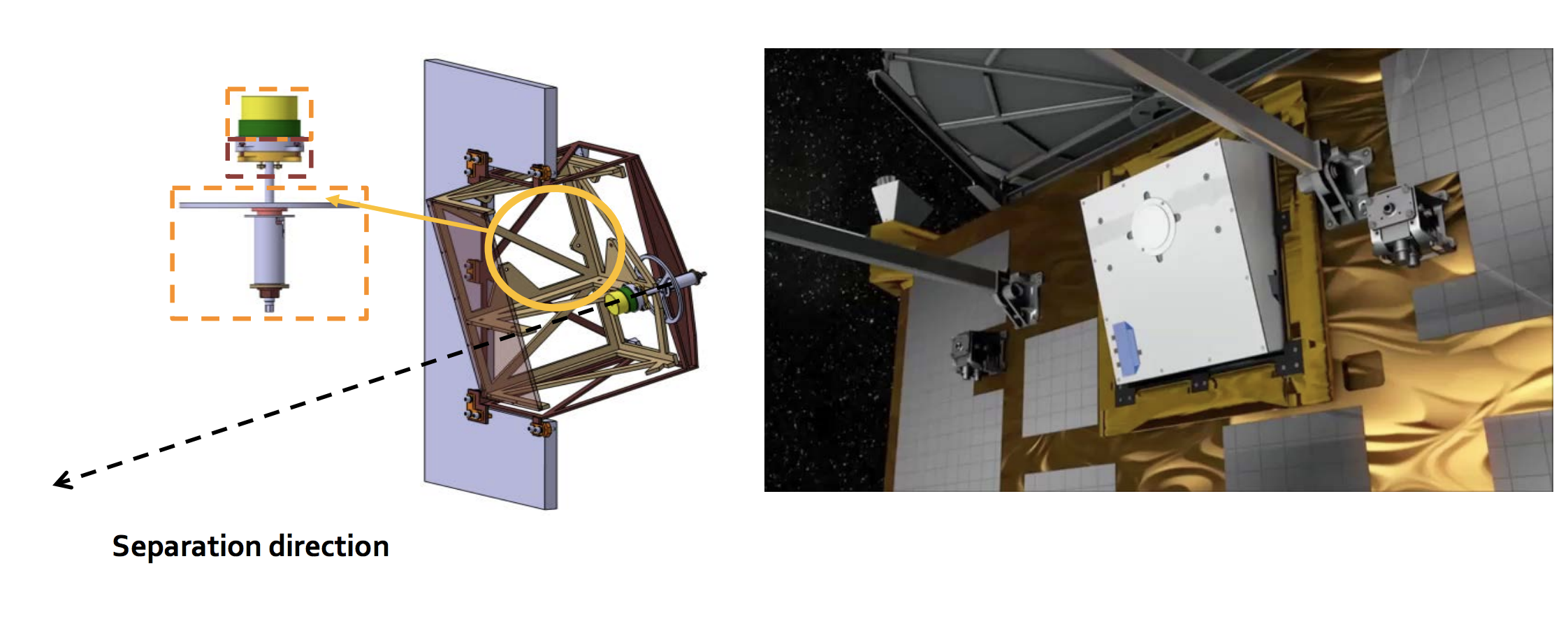
La semana pasada la sonda japonesa Hayabusa 2 continuó con su exploración del asteroide Ryugu. Después de que el 21 de septiembre desplegase los dos «rovers» japoneses MINERVAII-1, le tocaba el turno a la subsonda franco-alemana MASCOT. A diferencia de los pequeños MINERVAII-1, de apenas 1 kg de masa cada uno, MASCOT era un robot de 9,6 kg mucho más complejo y ambicioso. El 2 de octubre Hayabusa 2 se volvió a acercar a Ryugu lentamente y el 3 de octubre a las 01:57 UTC liberó a MASCOT usando un mecanismo con muelles desde una altitud de 51 metros antes de retirarse a una distancia de 3 kilómetros, donde permaneció durante el transcurso de la misión del pequeño rover. En la débil gravedad de Ryugu la caída de MASCOT fue muy lenta y la sonda no alcanzó la superficie hasta las 02:17 UTC. El impacto se produjo a una velocidad de apenas 15 cm/s y después MASCOT rebotó por la superficie hasta quedar parado. A diferencia de los rovers MINERVA, MASCOT no llevaba paneles solares y dependía únicamente de una batería de 200 vatios-hora, así que su misión principal tenía los días —o mejor dicho, los soles— contados.

Tras el aterrizaje MASCOT empleó su brazo móvil interno de forma automática para orientarse correctamente en la superficie, pero no consiguió alcanzar una posición adecuada. El control de la misión ordenó entonces a la sonda que volviese a orientarse, esta vez con éxito. Después de un sol —o sea, un día de Ryugu, con una duración de 7 horas 36 minutos—, el control hizo saltar al pequeño robot hasta otra zona de la superficie, donde pasaría el resto de su vida útil sobre el asteroide. MASCOT tuvo que aguantar temperaturas que iban desde los 77 ºC alcanzados durante el día a los —60 ºC de la noche. La misión duró más de lo previsto: 17 horas en vez de 16. O lo que es lo mismo, tres días y dos noches de Ryugu. La sonda mandó datos hasta las 19:04 UTC, cuando se agotó su batería. A continuación Hayabusa 2 se volvió a retirar a veinte kilómetros de distancia del asteroide.


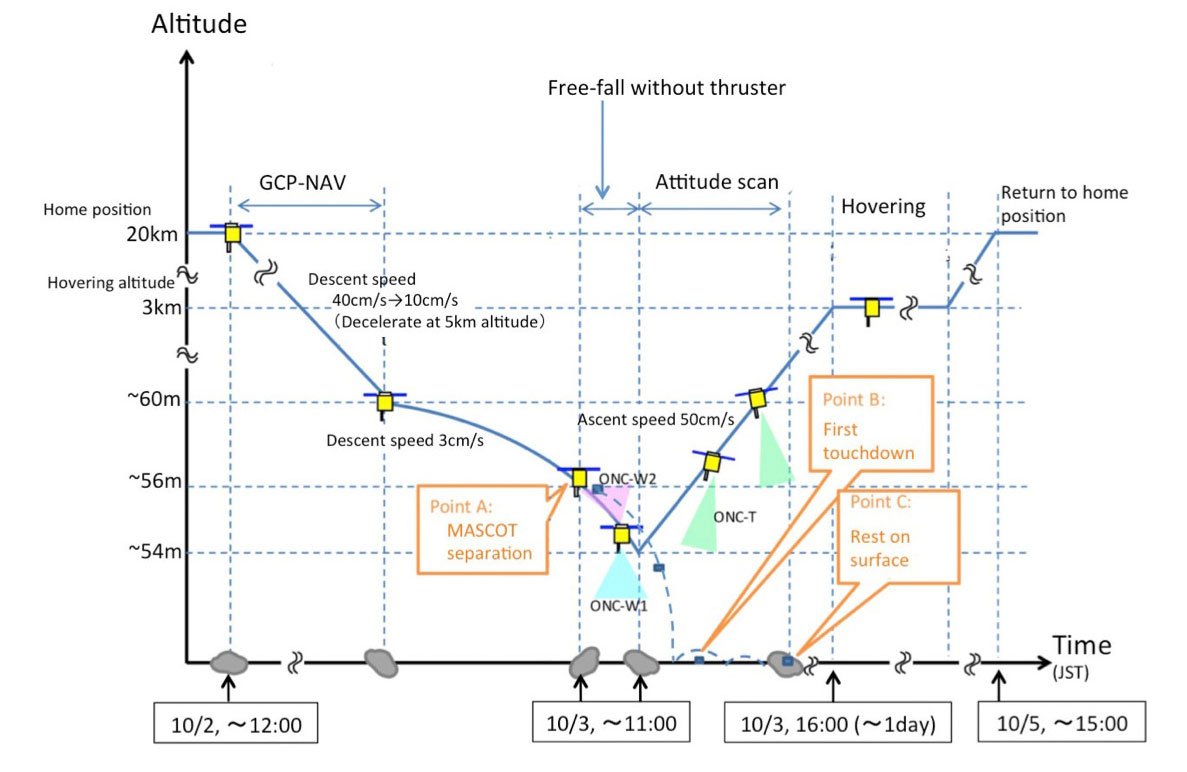
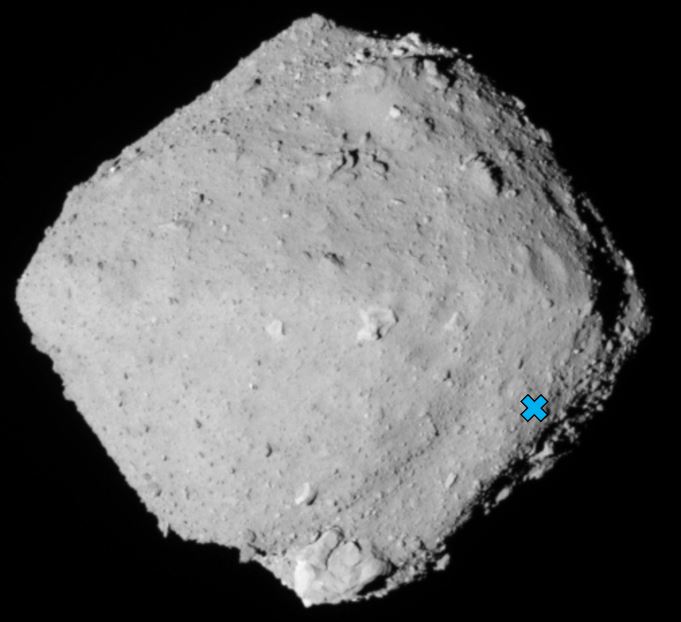
Como ocurrió con el despliegue de MINERVAII-1, Hayabusa 2 se acercó a Ryugu con el Sol a su «espalda» y MASCOT se separó de la sonda a 5 cm/s siguiendo una trayectoria en ángulo para evitar cualquier posibilidad de colisión. La zona de aterrizaje fue elegida de tal forma que las temperaturas no fuesen demasiado extremas y que se pudiese garantizar unas comunicaciones fluidas con Hayabusa 2 para transmitir los datos a la Tierra. Obviamente también se evitaron las regiones con muchas rocas de gran tamaño y aquellas que ya han sido seleccionadas para la recogida de muestras por parte de Hayabusa 2 con el fin de eliminar cualquier contaminación posible.

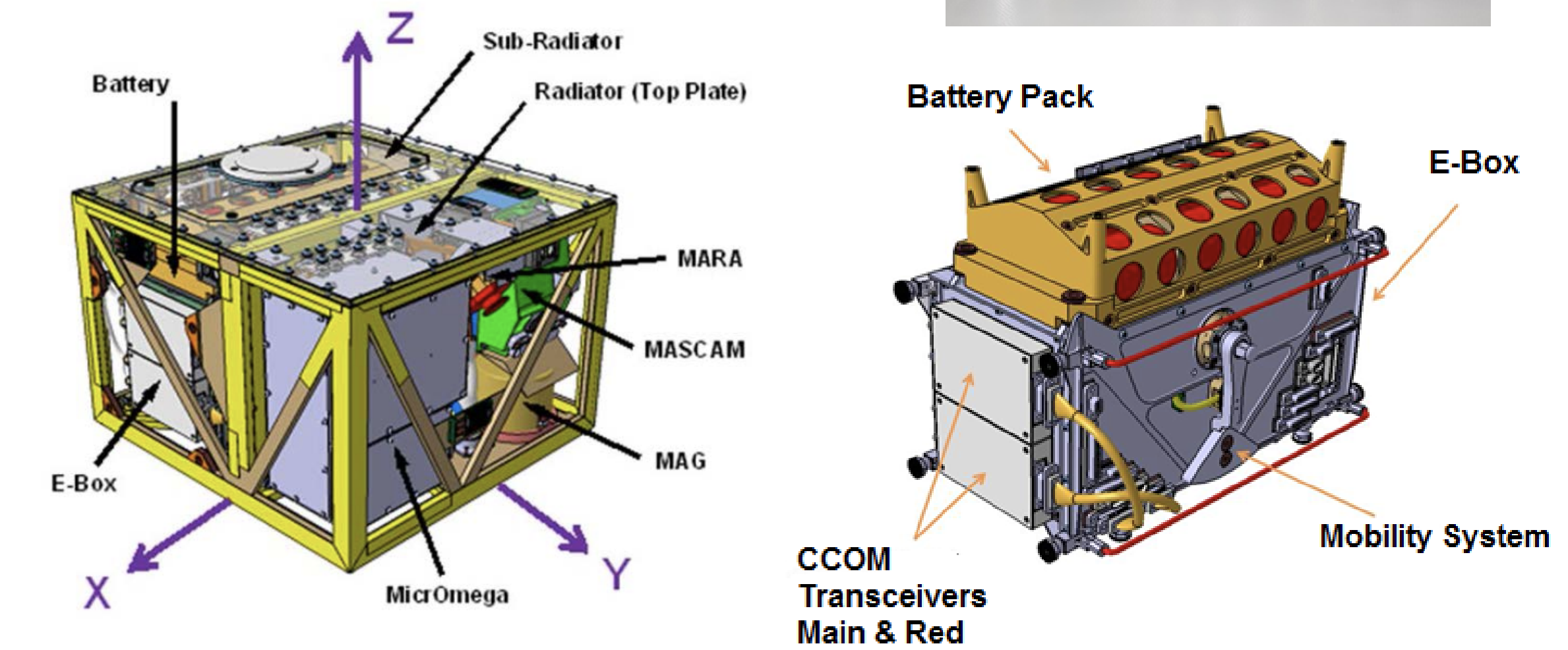
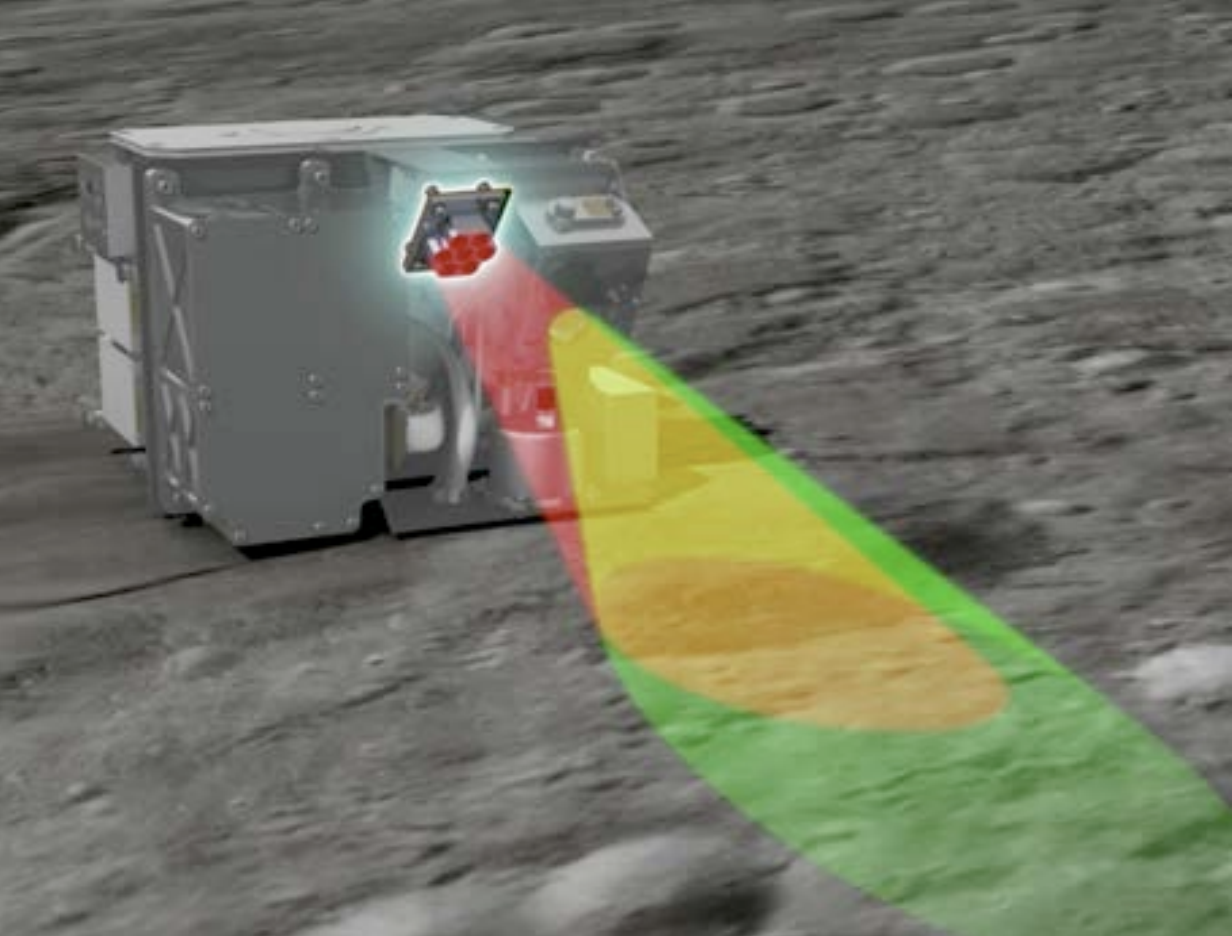
MASCOT (Mobile Asteroid Surface Scout) era técnicamente un rover en el sentido que fue diseñado para moverse por la superficie de un asteroide, pero exteriormente parecía una caja de zapatos de 29,5 x 27,5 x 19,5 centímetros. Se trata de un proyecto del DLR, la agencia espacial alemana, con participación de varios países europeos, especialmente el CNES francés. Pese a su pequeño tamaño MASCOT llevaba cuatro instrumentos científicos con una masa total de unos 3 kg: la cámara MASCAM (construida por el DLR alemán), el radiómetro MARA (DLR), el espectrómetro infrarrojo MicrOmega (o µOmega, del CNES francés) y el magnetómetro MASMAG (de la Universidad Técnica de Braunschweig en Alemania). La cámara tiene un campo de 55º y su línea de visión está inclinada 22º con respecto a la superficie. Incluye un sensor CCD de 1024 x 1024 píxeles y tres LED para iluminar la superficie. Los resultados de las observaciones de MASCOT se publicarán a su debido tiempo en revistas de impacto.

MASCOT es un pequeño proyecto con una historia muy interesante a sus espaldas. Oficialmente su origen se remonta a la década pasada. Por entonces varios países de la agencia espacial europea (ESA) estaban intentando sacar adelante una misión de retorno de muestras a un asteroide cercano denominada Marco Polo. Para aumentar el retorno científico de la misión se propuso desplegar alguna sonda de superficie. La propuesta estaba liderada por el DLR y el CNES en base a su experiencia en el diseño de la sonda Philae de la misión Rosetta. En un principio se estudió la posibilidad de que MASCOT —por entonces acrónimo de Marco Polo Surface Scout— tuviese un diseño parecido al de Philae, con ganchos y tren de aterrizaje. Este diseño fue abandonado por ser demasiado complejo y finalmente se optó por no usar ningún mecanismo de aterrizaje e incluir un brazo interno para moverse por la superficie, un diseño simple que ya había sido sugerido por el DLR a la ESA en 1995. Philae era una sonda mucho más ambiciosa que MASCOT y requería de un anclaje firme en la superficie para usar su taladro —elemento esencial de la misión—, pero viendo el éxito de MASCOT y los otros rovers de Hayabusa 2 uno no puede dejar de pensar que quizás hubiese sido mejor estudiar el cometa 67P con una o varias sondas más sencillas sin tren de aterrizaje.

En los próximos meses seguiremos hablando de MASCOT a medida que se publiquen sus resultados científicos, pero lo que ya es seguro es que veremos un MASCOT 2.0. Recientemente las agencias JAXA, DLR y CNES han formado un acuerdo para enviar un rover similar a MASCOT en la misión japonesa MMX para traer muestras de Fobos, la mayor luna de Marte.
https://twitter.com/haya2e_jaxa/status/1048211331655057408
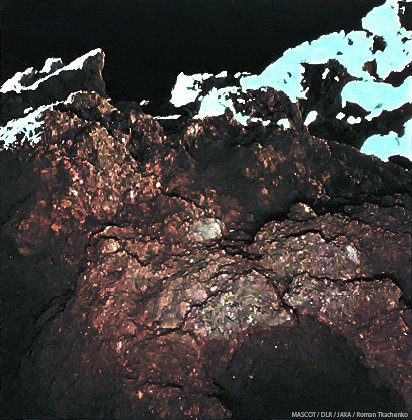
https://twitter.com/_RomanTkachenko/status/1048203570829570048
Después de tanto esfuerzo solo 17 horas funcionado cuando los minerva mucho mas chicos siguen activos o eso creo, porque no los paneles solares ?? Me gustaría que alguien me indicase el porque no se los pusieron, había un problema de dinero o técnico??
Respecto al Mascot 2.0 de la misión MMX de la Jaxa dicen que llevaran ruedas y paneles, es verdad o ira dando saltos como este. No es un problema en la baja gravedad llevar ruedas ??
Gracias por la información Daniel y por tu trabajo que nos permite estar al día de estos temas.
Jorge m.g.
El peso de la subsonda MASCOT está limitado, poner paneles solares significa dejar fuera instrumentos científicos.
Saludos.
En una misión espacial cada Kg es algo critico.
Incluyendo paneles solares y circuitería electrónica asociada a ellos:
1.1 Kg es lo que pesa cada Rover Minerva II-1. Estos Rover’s saltan.
1.0 Kg pesa el Rover Minerva II-2.
9.6 Kg pesa el MASCOT 1.0, es el modulo que mas pesa, y este no salta, gira para re-acomodarse posicionarse para poder hacer mediciones (el éxito de este modulo dependía de estar bien alineado). MASCOT 1.0 lleva los instrumentos mas sofisticados y de mayor consumo,
si se le hubiera añadido paneles solares a MASCOT se hubiera tenido que sacrificar algún instrumento valioso.
MASCOT 2.0 no se diseñara para que dure 17 horas como el MASCOT 1.0, sino para que dure meses, y definitivamente la ruedas serian inútiles en Fobos, con tan baja gravedad, terminaría el MASCOT 2.0 “flotando”.
¿Qué tiene que ver, que sean pequeños o grandes para que lleven paneles solares? Los MINERVA tienen una misión específica de larga duración, MASCOT tenía que hacer muchos experimentos científicos que NO requerían una estancia larga… punto, no se podían repetir, simplemente o era innecesario.
MASSCOT 2, va a llevar a cabo una misión de estudio diferente, con instrumentos que sí será útil utilizar varias veces, por eso su duración debe ser mayor y llevar paneles. Eso sí, ruedas no creo que lleve.
Por que le dicen rovers. No lo son, son pulgas robots. Saltan como pulgas espaciales. Pulgas!!! 🙂
hoppers
Pues si, quizás este tipo de subsondas hubieran sido mejor opción que nuestra querida Philae. Varias sondas en distintos puntos de 67P/Churiumov-Guerasimenko… interesante…
Pero claro a toro pasado es mucho más fácil decidir 😀
Saludos.
Yo creo que es una tendencia que cada vez se impondrá más en el mundo de las sondas no solo a asteroides y cometas…como vemos la futura sonda MMX de Jaxa también llevará, si no que Insight, ha viajado con dos pequeñas nanosondas hasta Marte…y el futuro rover de la NASA de 2020 ya viajará con un pequeño helicóptero…creo que esto irá a más, en cuanto la miniturización siga mejorando y los precios de estos pequeños aparatos siga bajando…
Veremos pero estos enjambres prometen ser toda una revolución para descubrir nuevas cosas asombrosas…
A ver… mejor no hubiese sido en el sentido de que los experimentos y el retorno científico hubiese sido menor, o el mismo en el mejor de los supuestos. Que no hubiese quedado esa sensación de que «falló algo» bueno, prefiero intentarlo y que falle una parte, a no intentarlo.
Sí, yo creo que uno se plantea el conservadurismo en la misión principal, para garantizar su éxito, y hacer apuestas más arriesgadas con las subsondas.
Yo tan bien creo que ubiera sido más provechoso una docena de éstos pulga bot que el costoso e inesesariamen complejo lander de la mision rosseta.
Casi hemos dejado de decírtelo, pero eres asombrosamente persistente en tu empeño de destrozar el castellano escrito.
Mira con lo agetreada que es mi vida no tengo tiempo para consultar la RAE cada vez que pongo un comentario
Para eso basta con aprobar educación básica.
Hola Daniel. Una duda: indicas que sólo se realizó un salto a otra ubicación del asteroide, pero en spaceflight.com dicen que «made three hops to different locations», ¿tienes algo más información?
Por otra parte comentas que MASCAM ha sido construida por el DLR alemán. Por ampliar un poco de información, de un par de comunicaciones se extrae que la contribución de MASCAM al proyecto es del «DLR Institute of Planetary Research in Berlin» pero en lo que se refiere al diseño mecánico, óptico, ensamblaje, integración y pruebas ha sido realizado por distintos equipos de Airbus Defence and Space tanto en Alemania como en Francia… mucha gente involucrada sólo para el desarrollo de la cámara MASCAM!
Gran artículo, gracias.
La información es la que ha dado el DLR alemán. En muchos sitios se confunden los saltos con los cambios de orientación y rebotes por la superficie, así que no sé si ha podido ser debido a eso. Lo que está claro es que solo hubo un salto importante.
Nada interesante:
https://www.youtube.com/watch?v=RUulMg2UaSE
Vaya basura de vídeo amigo «secret». Espero que el administrador borre cuanto antes tu «spam-comentario» y mi respuesta.
Esto es un sitio serio, mientras que tu vídeo no llega ni a humor malo. Saludos majo.
¿No vale ya de tocar los huevos con tus chorradas?
Hace falta un sistema de registro para poder ignorar usuarios, por favor…
Ignóralo, como el 99% de los que andamos por aquí.
Los sistemas de registro de comentarios destrozan los aportes de la gente, el numero de comentarios baja un 80% fácilmente. Que lo dejen como esta.
¡Ryuguuu!
Los que han trabajado en esta sonda deben de estar dando saltos de alegría.
Será muy interesante leer los resultados de esta misión.
Me imagino que un objeto así, tan pequeño y tan cercano al sol debe de tener su propio ciclo cerrado de materiales sublimados, o polvo proyectado al vacío por la radiación solar, y vueltos a depositar. Supongo que un ciclo así podría mezclar sustancias continuamente en su superficie y dar lugar a reacciones químicas interesantes, con ayuda de la energía solar.
Seguramente las sustancias orgánicas que recoja Hayabusa darán grandes sorpresas, como macromoléculas, por ejemplo.
Que ganas de la misión a Fobos. Me muero por ver fotos en detalle del famoso «monolito».
Que disfrute de artículo y todavía nos queda mucho más que ver de la Hayabusa. Sabe a poco que no llevara paneles solares, al menos unos pequeños que solamente valieran para recargar sus baterías.
Muy buen trabajo, JAXA y equipo del rover.
En qué formato se almacenan las imágenes?
Qué procesadores les meten en las circuiterías? En mascot p.ej. Pic, x86, arm,…
Es posible usar sensores normales ccd usando el aparato a una temperatura acondicionada usando resistencias y batería cargada por paneles solares?
Es la solución para completar la exploración de las sondas en cuerpos menores. Con un peso inferior a 10 kg, se pueden llevar 2 o 3 por sonda y explorar distintos puntos in situ. Espero que la proxima vez, se incluyan paneles solares a costa de 1 o 2 kg extra.
Lo que mas me está impresionando es la enorme capacidad de maniobra de Hayabusa2, un enorme éxito de Jaxa.
Pues si e imagina las vistas que se tendrán cuando haga todas estas maniobras la MMX sobre Fobos, y con Marte de fondo…será simplemente increíble…
Sobre un futuro rover para esta luna y moverse por el…¿unas orugas no serían la solución?
No creo. La gravedad superficial de Fobos es 1 orden de magnitud superior a la de Ryugu, pero sigue siendo una aceleración gravitatoria insuficiente para que la tracción convencional (orugas o ruedas) funcione adecuadamente.
A modo de comparación:
Tierra: 1 g (1.000.000 microges)
Luna: 0,1654 g (165.400 microges)
Fobos: 0,000581 g (581 microges)
Ryugu: 0,000050 g (50 microges)
Saludos.
P.D.: ¡Episodio fresquito recién salido del horno! 🙂
http://radioskylab.es/2018/10/10/063-atenuacion/
Gracias Pelau, buen aporte 😉
Una misión impresionante, y solo por 150 millones de dólares. Me pregunto cuanto habría costado si la hubiera realizado la NASA.
Para las misiones a los asteroides, si que sería posible y rentable fabricar sondas en serie y enviarlas a unos cuantos (por ejemplo varias como esta), ya que son muchos, muy parecidos y prácticamente en órbitas similares y cercanas a la Tierra.
Esto es mucho mas difícil con los planetas y satélites (lunas), que son pocos (relativamente), muy diversos y a diferentes distancias.
No nos das descanso Daniel, muchas gracias.
WOW realmente es un precio ríduculo super «barato» casi parece un presupuesto del ISRO…
Bueno podemos hacernos una idea con Osiris Rex, si es verdad es «más compleja y traerá más muestras» pero su presupuesto esta sobre los 800 millones sin contar el lanzador…
https://en.wikipedia.org/wiki/OSIRIS-REx
Y si aquí no debería haber escusas para fabricar en serie..y estas misiones deberían ser todas tipo «discovery» y de bajo coste…
Tengo dudas de si el ‘rover’ MASCOT está incluído en el presupuesto. Caro no deberían ser, pero me encantaría ver un desglose de los costes. Por ejemplo, cuanto costó el sensor CCD de 1Mpixel.
Aprovecho para dar las gracias a Daniel, por esta gran cantidad de artículos escritos en tan poco tiempo. Me da lástima yo no tener conocimientos suficientes para preguntar cosas interesantes. Tampoco soy un lince con los detalles. Incluso a veces soy un poco ogro. Espero me perdonen los que escriben comentarios y también Daniel.
Habrá que esperar a ver los resultados científicos pero desde luego hay imágenes que prometen mucho. La imagen de la superficie iluminada por la propia sonda me parece alucinante.
A ver si Japón tiene la misma suerte con la misión a Fobos.