

Curiosity continúa su travesía hasta las faldas del Monte Aeolis, donde se encuentra el objetivo primario de su misión. El 26 de noviembre el rover ya había recorrido un total de 4427 metros desde que aterrizó en Marte en agosto de 2012. A medida que el invierno se cierne sobre el cráter Gale, Curiosity necesita más calor para mantenerse operativo. Esto implica que el control de tierra debe decidir entre gastar el limitado presupuesto de energía diario en operaciones científicas o en conducir. Puesto que la prioridad actual es llegar a la base del Monte Aeolis lo antes posible, las actividades científicas diarias irán disminuyendo poco a poco salvo por las realizadas durante algunas paradas específicas.
El día marciano 404 (Sol 404) de la misión -o lo que es lo mismo, el 25 de septiembre- el sistema de navegación autónoma del rover (autonav) dejó a Curiosity en una posición en la que no pudo comunicarse directamente con la Tierra mediante la antena de alta ganancia. Al no poder recibir nuevas instrucciones, el rover condujo hasta la posición anterior en la que había logrado contactar con el centro de control. Durante el ‘cierre del gobierno’ de Estados Unidos el pasado octubre, Curiosity continuó operando con normalidad, puesto que el personal del JPL no trabaja directamente para la NASA, sino para el Caltech.
Los días marcianos 436 y 437 Curiosity llevó a cabo por primera vez dos jornadas seguidas de navegación autónoma. En Sol 437 el vehículo se puso en marcha por su cuenta justo donde el sistema autonav le había dejado el día anterior, lo que constituyó todo un hito en la misión. Durante el Sol 440 (31 de octubre), el rover se acercó al saliente apodado Cooperstown para realizar una parada científica y usar sus instrumentos con el fin de estudiar la zona. Cooperstown, con una longitud de 30 metros, es un saliente formado por rocas sedimentarias que recibe su nombre de un yacimiento sedimentario que se encuentra en el estado de Nueva York. Entre los Soles 441 y 443 Curiosity desplegó su brazo robot -por primera vez desde que estudió la zona Darwin el 22 de septiembre- y llevó a cabo observaciones con las cámaras MastCam y MAHLI, además de realizar medidas con los instrumentos ChemCam y APX. El 7 de noviembre el ordenador de la sonda se reinició inesperadamente por primera vez en el transcurso de su misión durante una actualización rutinaria del software, lo que se conoce en la jerga del JPL como warm reset (recordemos que Curiosity dispone de dos ordenadores gemelos redundantes y que solamente usa uno de ellos en un momento dado). El fallo tuvo lugar cuatro horas y media después de que el control subiese el nuevo software a la memoria del ordenador. Entre el 2 y el 13 de noviembre el rover permaneció inmóvil por culpa de la actualización de sfotware y el problema con el ordenador. Tras analizar y corregir el problema, Curiosity continuó con sus operaciones habituales en Sol 452 (13 de noviembre) y al día siguiente la sonda volvió a rodar por la superficie marciana.


La sesión de conducción del Sol 455 se tuvo que interrumpir debido al incorrecto funcionamiento en el motor de una de las ruedas. Después de este problema menor, el 17 de noviembre (Sol 456) surgió una anomalía en el sistema eléctrico que preocupó sobremanera al equipo de la misión. El incidente, clasificado como ‘cortocircuito suave’, generó un pico de voltaje en el sistema. Las operaciones científicas y de conducción se suspendieron durante diez días para buscar una solución al problema. La diferencia de potencial entre el sistema eléctrico (que opera a 32 voltios) y el chasis del vehículo había sido de 11 voltios desde el aterrizaje, pero a raíz del incidente pasó a ser de 4 voltios, lo que delata algún tipo de contacto indebido entre el sistema eléctrico y la estructura de la sonda. Es la segunda ocasión que Curiosity experimenta un incidente parecido. El día del aterrizaje también sufrió otro pico de tensión, pero en aquella ocasión fue debido a los dispositivos pirotécnicos para liberar los elementos del rover. Tras estudiar el problema se averiguó que el origen del pico de tensión estaba en el generador de radioisótopos (RTG), algo previsible si tenemos en cuenta que los RTG son famosos por estas variaciones bruscas de voltaje. Afortunadamente, todos los sistemas electrónicos del rover están preparados para funcionar en un rango amplio de voltajes, así que el incidente no produjo ningún daño permanente.
El 22 de noviembre el rover retomó las operaciones científicas y en Sol 465 Curiosity se puso en marcha otra vez. Ayer día 26 de noviembre Curiosity celebró el segundo aniversario de su despegue desde Florida en 2011. Feliz cumpleaños, Curiosity. El Monte Aeolis está cada vez más cerca.

A Curiosity aun le queda mucho que ofrecernos. Muy buen artículo…
Gracias Dani por otro excelente artículo!
Que suerte que lo del pico de tensión no pasó a mayores. Alguien sabe si existe alguna forma de ponerlo a tierra para recuperar la diferencia de 16V originales?
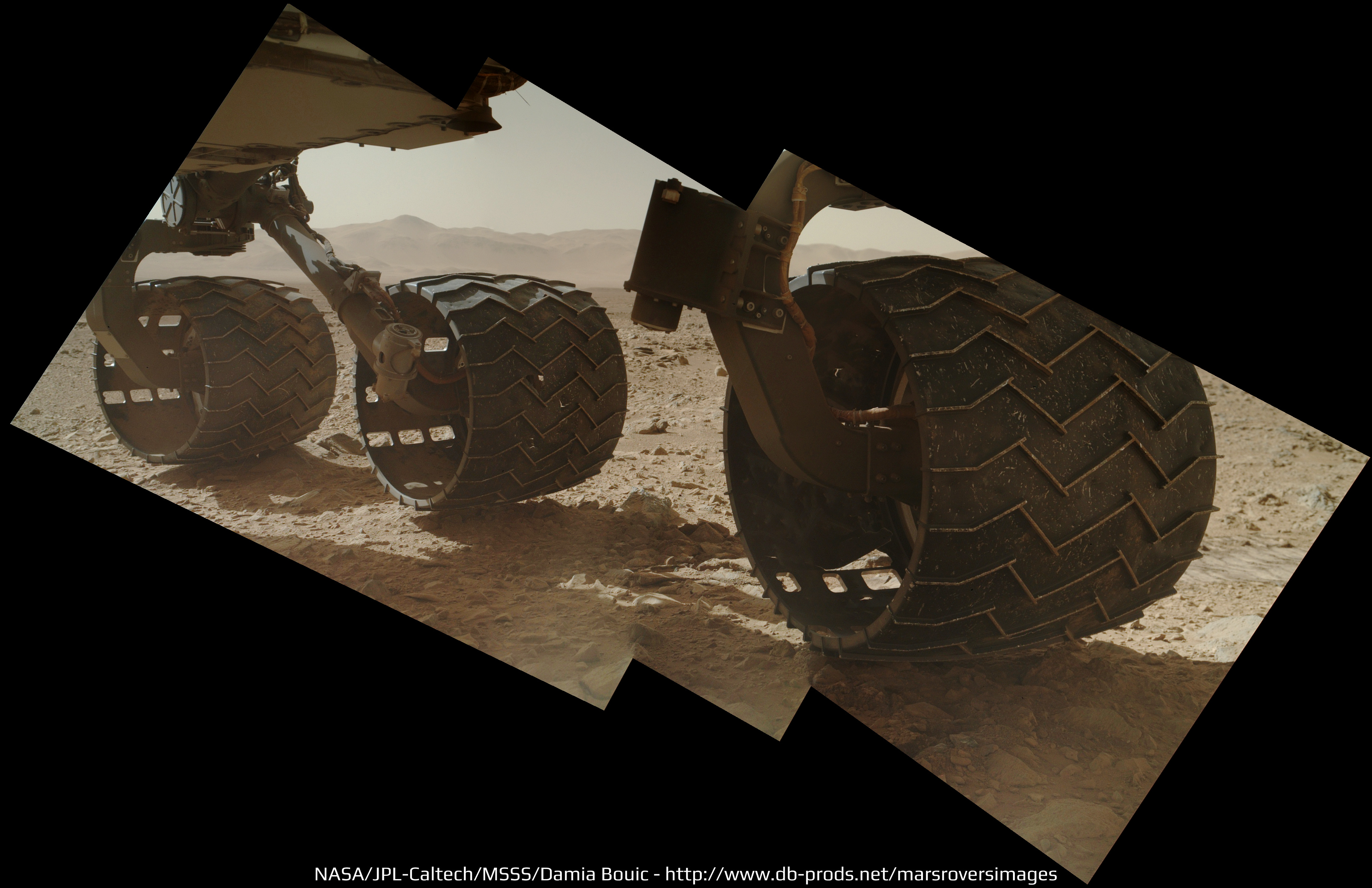
Por otro lado las ruedas, sobre todo delantera izquierda presentan algo mas que signos de fatiga, está casi partida de lado a lado, en sólo 1,5 años de uso y sin siquiera comenzar a trepar el monte…
No es posible por una sencilla razón:
El RTG (mejor dicho, el generador eléctrico que tiene el RTG) no está conectado a tierra, por lo que aunque las cargas las conectemos a tierra no ocurriría nada, salvo que tendíamos tensiones negativas comparandolas con la superficie de marte, que tampoco pasaría nada.
Es imposible conectar a tierra de forma directa un rover que se mueve, ya en la Tierra se necesita varias picas de 2 metros de largas para conseguir una impedancia de unos 8 ohmios, por lo que las ruedas de Curiosity, en caso de que hubieran sido de metal no harían el mejor contacto del mundo (podemos hablar de cientos de ohmios, dependiendo del peso de curiosity, la conductividad de la superficie, etc.
Y no está partida, JoseP… Es un mosaico de varias fotos. Por eso se ve el borde desfasado.
Que buenas fotos!!
Aprovecho para avisar que ya están disponibles los subtitulos en ESPAÑOL para la peli de Gagarin (Pervyy V Kosmose), tanto en:
http://www.subdivx.com/index.php?buscar=Pervyy+v+kosmose&accion=5&masdesc=&subtitulos=1&realiza_b=1
Como en:
http://www.opensubtitles.org/es/search/imdbid-2856930/sublanguageid-spa/moviename-pervyy%20v%20kosmose
Saludos!
Que bueno saber que el sobrevoltage no paso a mayores! Pero me sorprende los signos de desgastes del rover. Pensar que por ejemplo el Opportunity lleva nueve años y contando, en funcionamiento. Igual el Curiosity es una de las misiciones actuales que mas que asombra e interesa. Me parece genial que se hagan estas cosas para comprender mejor al mundo que nos rodea, a nuestra historia, al univeso!
Muy buen articulo, y siempre pendidente del blog!
Saludos!
A mi también me sorprende la fragilidad de las ruedas, en la última foto, la rueda central tiene unos agujeros impresionantes.
Creo que estos agujeros están hecho aposta, fijate en las ruedas
http://cdn.theatlantic.com/static/mt/assets/science/curiosity615.jpeg
Hay agujeros fabricados adrede para mejorar la tracción y otros que han aparecido en el transcurso de la misión.
De hecho, las ruedas están fabricadas en aluminio. Los ingenieros consideraron que era la mejor opción. He leído en PLlanetary Society que aunque fueran cuadradas, o se fueran «pelando» el rover seguiría moviéndose sólo apoyándose en la estructura de los radios … ¿¿¿??? … hay por ahí alguna foto de pruebas en tierra donde las ruedas pasan directamente a tener una forma ovoidal (no hay más que buscarlas en algún buscador Web)… y eso según los ingenieros no supondría problema alguno. De hecho, dicen en JPL (Emily Lakdawalla) que está previsto que con el paso del tiempo acaben teniendo esa forma…
No sé yo, no me convence la explicación que dan… esperemos que este juguete tan caro y tan valioso no se quede tirado por un mal diseño de las ruedas… (con lo duradero que es el titanio… en fin).
Eso, sin mencionar que su hermano menor Spirit se quedó atrapado en una trampa de arena… cosa que podría pasar a Curiosity cuando las ruedas ya no ejerzan un buen par de tracción… bueno, mejor no pensarlo…
Por cierto Dani, mira que leo a menudo sobre el Rover en las Web de la NASA y el JPL, pero a pesar de que no tengo problemas con el inglés, te explicas mejor que ellos. E incluso, aportas cosas que no he visto, como lo de que el rover, al no poder comunicarse con Tierra, volvió sobre sus pasos hasta el punto donde se comunicó por última vez. Una vez más gracias.
De nada, Fer. Efectivamente, es estima que la vida útil de las ruedas es superior a la del rover, salvo por el RTG.
He leido lo mismo que tu y tampoco me deja 100% tranquilo… sólo comparar la foto del 2 de octubre con la de ahora y se puede apreciar como creció la «pinchadura». http://planetary.s3.amazonaws.com/assets/images/spacecraft/2013/20131002_0411MH0262000000E1_DXXX_detail.jpg
También he visto fotos de las ruedas del rover que se utilizó para las pruebas, con 12km de distancia recorrida, y el daño es similar al que presenta Curiosity con tan solo 4.5km.
Y si es que se puede comparar con las ruedas de Opportunity (pesa 5 veces menos), estas no presentan ni siquiera abolladuras apreciables…
http://marsrover.nasa.gov/gallery/all/1/f/3419/1F431713050EFFC7L2P1214R0M1.JPG
Saludos!
Sí, parece preocupante, pero todos los expertos coinciden en que no hay problema alguno, así que prefiero hacerles caso. 😉
Francisco, esos agujeros cumplen dos funciones. La primordial es mejorar la tracción como dice Daniel. Y de paso, en código morse son las letras J P L.
http://commons.wikimedia.org/wiki/File:Curiosity_wheel_pattern_morse_code.png
http://www.space.com/17243-mars-rover-curiosity-test-drive-coded-tracks.html
Ya, no me refería a esos agujeros, esos que son letras Morse no, sino los que han ido apareciendo…
Excelente artículo… Ni tenía ni idea de todo eso… Cuándo llegará al objetivo primario de su mision, el monte aeolis?
Obviamente no se sabe con exactitud, pero se cree que Curiosity ya ha cubierto casi la mitad de su trayecto. Ponle seis meses más como mínimo. Saludos.
6 meses que esperaré con gusto… Yo creo que el siguiente paso lógico seria un explorador aéreo o tipo hovercraft, pero, sería posible transportarlo a marte? Y que fuente de energía necesitaría utilizar?
PD: no estoy hablando de una mole como curiosity, sino de algo más pequeño y ligero, con cámaras, los sensores para moverlo y pocos instrumentos de ciencia. Sería posible? Hay algo así planeado?
Propuestas de aviones en Marte hay algunas, pero actualmente han caído en desgracia. Primero, hacer volar algo en Marte cuesta mucho y, segundo, los aviones tienen las desventajas de los orbitadores y ninguna de las ventajas de las sondas de superficie. Pese a todo, siguen apareciendo propuestas para el estudio de la alta atmósfera. Con respecto a hovercrafts, la verdad es que nunca he visto una propuesta así para una sonda marciana. Con la baja densidad de la atmósfera de Marte veo difícil hacer realidad algo así.
Daniel Fernandes, a veces me pasa como a tí: las ganas te pueden… de momento contentémonos con que sigan mandando un robot de estos cada dos años, que bastante hacen en la NASA con el ridículo presupuesto que tienen.
Lo del hovercraft es ciencia-ficción a día de hoy. Fíjate que su «primo» el sky-crane que se utilizó (y se volverá a utilizar) para dejar Curiosity en Marte es lo más parecido a lo que mencionas… pero sólo tuvo unos segundos para planear, descender de manera más o menos cnotrolada, dejar el rover en la superficie y alejarse lo más posible para estrellarse… y es que las restricciones en cuanto a peso y combustible son las que son….
Yo vería más bien una especie de globo aerostático… Dani ya habló de ello hace tiempo, en un artículo donde las Sondas Fobos soltarían algún globo de este tipo (Sonda Fobos -NPO Lávochkin-).
http://webcache.googleusercontent.com/search?q=cache:udHH4xAOfsMJ:danielmarin.blogspot.com/2013/03/marsojod-cuando-la-union-sovietica-pudo.html+&cd=3&hl=es&ct=clnk&gl=es
Aunque tecnicamente no soy nadie en el mundillo me encanta tu web y la informacion que posteas en ella, sigue asi y que el interes por el espacio no decaiga!
Este vehículo que han mandado no cumple ninguna normativa ni homologación electrotécnica marciana. Si se electrocuta algún marciano alguien o provocamos un incendio, los marcianos enviaran a sus auditores y les meteran un buen paquete, por listillos. Por la cuenta que nos trae a los habitantes d ela tierra más vale que arreglen el fallo cuanto antes.
Justificación técnica:
La ley de Ohm dice que tensión es igual a intensidad dividido por la resistencia, por lo tanto si pasamos de 11 voltios a 4 voltios significa que , la resistencia se ha decrementado en más de la mitad, por lo tanto existe un alto riesgo de una derivación a masa lo qual podria provocar un incendio o que cualquier marciano que toque el vehículo recibiera una descarga eléctrica.
Además de lo anterior, hay un grave fallo de diseño ya que una diferencia de potencial de 11 Voltios entre el circuito y la conexión de massa es inadmisible para un sistema de 32 voltios ya que significa que se ha calculado mal la sección de los cables y se produce una disipación de potencia en los mismos que puede recalentarlos y incendiar el vehículo en cualquier momento.