


Aparentemente, el sensor de la izquierda en la foto ha quedado fuera de servicio, probablemente de forma permanente. No se sabe aún la causa de este problema, pero teniendo en cuenta que el sensor funcionaba correctamente durante el trayecto hacia Marte, se cree que haya podido ser golpeado por alguna piedrecilla durante el aterrizaje por culpa de los gases de la etapa de descenso. Los sensores están formados por una especie de circuito impreso que es extremadamente sensible…y frágil.




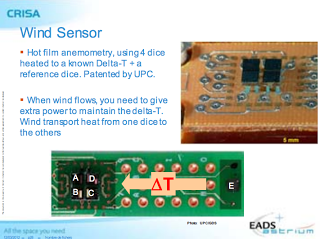

Detalle del sensor de velocidad del viento (Crisa).
Durante los primeros días surgieron sospechas de que algo iba mal con REMS, pero el equipo del instrumento se apresuró a desmentir dichos rumores de forma categórica. Ayer, durante una conferencia de prensa de la NASA, Javier Gomez Elvira -el investigador principal de REMS- reconoció el fallo de forma pública.
Debemos subrayar que REMS cuenta con un segundo sensor para medir la velocidad del viento, así que la pérdida de uno de ellos no es traumática. Pero tampoco es intrascendente. Se habían incluido dos sensores no sólo por redundancia, sino para refinar las mediciones y para asegurarse de que se pudiese medir esta magnitud incluso si uno de los sensores estuviera situado a sotavento. Ahora esto ya no es posible. Mención aparte merecen las críticas fuera de lugar por parte de algunos sectores de la prensa española. Como siempre, el deporte nacional en nuestro país parece que es buscar cabezas de turco para ponerlos en la picota. REMS ha sido diseñado y construido de forma impecable y hasta ahora nada indica que el instrumento tuviese algún defecto. La presencia de rocas y gravilla en la superficie del rover como efecto no deseado de la maniobra sky crane llamó la atención desde un principio. Está claro que estamos ante un serio inconveniente que habrá que subsanar en futuras misiones. Si es que hay futuras misiones. REMS ha sido construido por la empresa española Crisa, que forma parte de EADS-Astrium, bajo supervisión del Centro de Astrobiología (CAB) del CSIC. Junto con la antena de alta ganancia, constituye la participación española a la misión Curiosity, con un coste total de 23,5 millones de euros.
Pero no todo son malas noticias con REMS. El resto de sensores del instrumento funciona a la perfección y durante los días 16 y 17 de agosto REMS monitorizó el tiempo marciano. La temperatura del suelo en el lugar de Curiosity alcanza un máximo diurno de 3º C y un mínimo de -91º C. Como ya se sabía, la temperatura del aire es menos extrema, y va de -75º C a -2º C.

Los datos de presión atmosférica de REMS también son impecables y se ha comprobado que la presión oscila entre los 6,9 y los 7,8 milibares en las mediciones realizadas durante tres días (del 15 al 18 de agosto). Para más información, vale la pena visitar esta página del equipo de REMS.


Por lo demás, Curiosity sigue ‘despertándose’ poco a poco. ¡Ya se ha movido! Pero no nos adelantemos a los acontecimientos. Sigamos los eventos de forma cronológica. El 20 de agosto, se movió el brazo robot de 2,1 metros por primera vez, aunque no se extendió totalmente ni se puso en contacto con el suelo. Recordemos que en el extremo del brazo robot se encuentran dos instrumentos, MAHLI y APXS, así como una herramienta para quitar el polvo de las rocas, el taladro percutor y el sistema CHIMRA para filtrar y canalizar el regolito. El brazo parece robusto, pero recordemos que sería incapaz de levantar su propio peso en la superficie de la Tierra. El brazo, al igual que el resto de Curiosity, ha sido diseñado para trabajar y ‘vivir’ en Marte.



El 17 de agosto el instrumento ruso DAN (Dynamic Albedo of Neutrons) fue activado y midió la concentración de hidrógeno -y por ende, de agua- del subsuelo marciano bajo Curiosity. Los resultados de esta prueba muestran que DAN funciona de forma distinta a las pruebas realizadas durante el trayecto hasta Marte -normal, ahora hay suelo bajo él-, lo que indica que el instrumento funciona correctamente. DAN es prácticamente una copia de un instrumento ruso del mismo nombre situado en la sonda Mars Odyssey y cuyos resultados nos han permitido averiguar que el subsuelo marciano es muy rico en hielo, especialmente a altas latitudes. De hecho, fueron los resultados de DAN los que propiciaron la elección de la zona de aterrizaje de la sonda Phoenix.


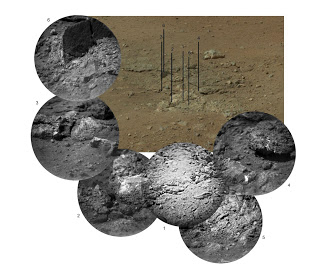
Por otro lado, el láser de ChemCam ha sido disparado hacia otras piedras durante estos últimos tres días, después de la prueba inicial sobre la piedra Coronation. En concreto, se han disparado pulsos láser hacia la zona conocida como Goulburn, una región donde los gases de la etapa de descenso han dejado al descubierto varias rocas. Por cierto, que el espectro de esta roca obtenido por ChemCam ha revelado la presencia de hidrógeno, magnesio y carbono (del dióxido de carbono de la atmósfera). El espectro indica que, como se esperaba, Coronation es una roca volcánica de tipo basáltico.

Y ahora vayamos a lo importante: ¡Curiosity ya se ha dejado sus primeras huellas sobre el suelo marciano! Durante sol 13 se probó el sistema de dirección del vehículo moviendo el par de ruedas traseras y delanteras. Por fin, hoy se ha realizado el primer trayecto. Curiosity se desplazó 4,5 metros hacia adelante, giró 120º hacia la derecha y luego retrocedió 2,5 metros, por lo que ahora la parte frontal apunta hacia el sur (antes lo hacía hacia el este) y a seis metros de la posición inicial. El lugar de aterrizaje ha sido bautizado oficialmente como Bradbury Landing, todo un detalle hacia el recientemente fallecido Ray Bradbury. A partir de ahora más nos vale acostumbrarnos a las huellas de Curiosity. Por cierto, recordar que el par de ruedas centrales, que es fijo, lleva un patrón de agujeros que, además de mejorar la tracción, sirven para dejar en el regolito marciano las siglas ‘JPL’ en código Morse.







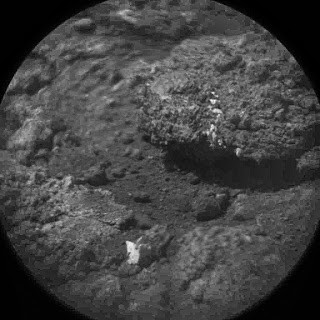
¡Primeras huellas de Curiosity sobre Marte! (NASA).
Parafraseando a los sabios, toda aventura comienza con unas pequeñas huellas en el regolito marciano. Y la aventura no ha hecho más que comenzar.
hay alguna cámara que pueda apuntar al sensor para ver los daños????
el «brazo» se fotografía desde el «cuello» por tanto desde el brazo habría línea de visión inversa (supongo), ahí está el MAHLI, que saca fotos a color en alta resolución de las piedrás que rodean el rover, supongo que se podría usar para ello. Habría que ver si la cámara se puede orientar hacia ahí…
Sí, la cámara del instrumento MAHLI.
Este comentario ha sido eliminado por el autor.
Pero ¿para cuando las imagenes en color de la mastcam 100? dijeron que ya estaban preparadas.
Ya se han tomado. Sólo falta que las envíen a la Tierra.
Y otra pregunta ¿como puedo registrarme a tu blog Daniel?
¿Te refieres para comentar? Creo que sólo tienes que rellenar el campo de datos que aparece en la caja de comentarios donde pone ‘Responder como’ o ‘Comentar como’.
Lo lamento mucho por el fallo del sensor de viento del REMS, no es un fallo de fabricación, sino de mala fortuna dentro de los riesgos que había de que un elemento del suelo marciano provocase daños. Mando mi apoyo al equipo del REMS del CAB y de CRISA. Han hecho un gran trabajo.
+1
carajo espero que la antena no falle porque sino ustedes los españoles van hacer parias espaciales !!.
En la ultima foto del articulo, se ve que se tomo de un punto mas alto que el curiosity, como se hizo esta foto??
Por cierto muy buen blog Daniel, te leo desde Mexico y ya tengo varios meses siguiendo tus articulos, muy interesante toda la informacion que manejas, no soy un experto, pero me interesan mucho todos estos temas…
Felicidades por tu gran labor!!
Gracias, Miguel.
La foto se obtuvo desde las cámaras situadas en la ‘cabeza’ de Curiosity. Luego se unieron usando un software específico y de ahí que parezca que se ha tomado desde ‘arriba’.
Saludos.
A pesar de los procesos de esterilización que se aplican antes del lanzamiento, el curiosity aún es portador de unas 3000 esporas por metro cuadrado. Se trata de evitar siempre un amartizaje en lugares donde se sepa o se sospeche la existencia de masas de agua para no estimular el eventual desarrollo de colonias bacterianas terrestres en un hipotético ecosistema marciano.
Pero ya hemos contaminado el planeta, eso es inevitable, la vida se expande por el universo de cualquier manera posible.
a mi me interesaría saber por mera curiosity (chiste obligado) de donde has asacado el dato de que «DESPÚES de la esterilización el curiosity es portador de unas 3000 esporas por metro cuadrado. No pongo en duda el dato es por saber…
Si te refieres a que con el Curiosity, u otra de las naves anteriores, ya hemos sembrado vida viable en Marte yo diría que no.
No existe en la tierra, que yo sepa, ningún organismo extremófilo que sea capaz de sobrevivir a las condiciones de baja presión, sequedad extrema, radiación, y escasez de agua libre, que se dan en los puntos de la superficie marciana visitados.
Se sabe que ciertas esporas pueden sobrevivir al vacío y a la congelación profundas durante años, pero no son inmortales. Resisten, pero al final mueren también si las condiciones ambientales no mejoran en algún momento.
Y si estamos hablando de endoesporas bacterianas pues lo mismo.
Teniendo en cuenta la cantidad ingente de seres vivos que quedan por descubrir en la tierra ( a una media de mil animales por año todavía nos quedarían miles de años para descubrí la totalidad de la vida de la tierra, sobre todo microbiana y submarina) esta claro que es probable que hayamos mandado algún ser vivo desconocido. Estamos destruyendo especies que jamás serán descubiertas. Algún día descubriremos al bicho en Marte de origen terrestre.
🙂
Confundes, como nos pasa con cierta frecuencia, la no imposibilidad con la probabilidad (de la que saltamos fácilmente a la certeza personal).
Posible, lo que se dice posible (porque no podemos demostrar lo contrario), podría ser que existiera una civilización de seres inteligentes que vivieran en Marte, a gran profundidad bajo tierra.
De ahí a que eso sea probable hay mucha distancia.
Por lo que sabemos no podemos descartar que alguna forma de vida terrestre sea capaz de sobrevivir en la superficie marciana, pero también por lo que sabemos no parece probable.
La intuición sin conocimiento no es una fuente fiable de información (incluso con conocimiento falla con bastante frecuencia).