

El 17 de noviembre de 2020 la nave Crew Dragon Resilience de la misión Crew 1 se acopló con la Estación Espacial Internacional (ISS). El contacto entre los sistemas andróginos de la cápsula y el puerto IDA-2 del PMA-2 tuvo lugar a las 04:01 UTC, pero el acoplamiento en firme no se logró hasta las 04:13 UTC. A continuación se abrió la escotilla del PMA-2 y, a las 06:05 UTC aproximadamente le tocó el turno a la escotilla de la nave Dragon. Michael Hopkins, Victor Glover, Soichi Noguchi y Shannon Walker entraron al interior de la ISS y, desde ese momento, ya son parte de la Expedición 64 de la estación, junto con Serguéi Ryzhikov, Serguéi Kud-Sverchkov y Kate Rubins. Aunque en dos ocasiones previas ha habido hasta trece personas de forma temporal en la ISS, es la primera vez que una tripulación permanente está formada por siete personas. Puesto que la ISS actualmente solo tiene seis camarotes para las tripulaciones permanentes, Michael Hopkins dormirá dentro de Resilience, que para algo es el comandante.

A la tripulación de la misión Crew 1 le queda por delante una temporada muy atareada hasta mediados de mayo. De todas formas, y con vuestro permiso, voy a utilizar la «excusa» de este suceso para hablar un poco sobre las maniobras de aproximación y acoplamiento de vehículos espaciales. La Crew Dragon Resilience ha tardado 27 horas y media en acoplarse con la ISS, mientras que su hermana Endeavour tardó poco más de 19 horas . Pero el pasado octubre la Soyuz MS-17 apenas tardó tres horas. ¿Por qué de estas diferencias? ¿No puede la Crew Dragon acoplarse más rápido? Contestando a la segunda pregunta, sí, sí que puede, pero la razón de que las agencias espaciales prefieran no optar siempre por un acoplamiento más rápido es un poco más compleja. Empecemos con este diagramas de las maniobras del acoplamiento de la Crew Dragon con la ISS:

Mucha gente cree que la Crew Dragon da «saltitos» para acoplarse con la ISS, pero, evidentemente, la nave sigue una órbita elíptica situada en el mismo plano que la ISS. La extraña apariencia de «saltos» de estos diagramas se debe a que usan un sistema de coordenadas centrado en el «objetivo», que en este caso es la estación espacial. En este sistema, el eje de coordenadas x se denomina V-bar haciendo referencia al vector de velocidad orbital del satélite, mientras que el eje y se llama R-bar por ser paralelo al radio terrestre (hay que tener cuidado, porque el sentido positivo en ambos ejes es a la izquierda y hacia abajo, respectivamente). Lo siguiente que tenemos que recordar es que para pasar de una órbita a otra primero elevamos el apogeo con una maniobra propulsiva en el perigeo hasta conseguir una órbita de transferencia de Hohmann. Una vez en el apogeo, encendemos el motor para elevar el perigeo hasta que la nueva órbita coincida con la que queríamos alcanzar (si estos conceptos te parecen complicados, te recomiendo jugar un par de horas al Kerbal Space Program). Para misiones a la ISS o a cualquier objeto en órbita baja las maniobras de cambio significativo de plano orbital son prohibitivas energéticamente, pero se pueden permitir cambios de plano muy pequeños si tienes combustible suficiente y quieres flexibilizar un poco la ventana de lanzamiento.


Con esto en mente, existen tres tipos de maniobras para acoplar una nave que despegue desde la superficie terrestre con un objeto en órbita. El primero es el más lógico y sencillo: la intercepción directa. Como su nombre indica, pasa por que la nave siga media órbita de Hohmann desde el punto de inserción orbital hasta el objetivo. Esta trayectoria permite el acoplamiento en media órbita (recuerda que el periodo en órbita baja de una órbita completa es de hora y media aproximadamente, aunque depende de la altura orbital precisa). Entonces, ¿por qué no se usa esta maniobra? Por varios motivos. Primero, esta trayectoria es muy sensible a cualquier error en la inyección orbital —dispersiones— que haya provocado el lanzador. O sea, cuál es tu órbita real frente a la órbita esperada. Eso significa que no habrá tiempo para corregir estos errores y se irán acumulando. El segundo es que la tripulación, o los sistemas automáticos del vehículo, deben ser los encargados de corregir estos errores, ya que no habrá mucho tiempo para que el control de Tierra pueda medir exactamente la posición de la nave y enviar a la tripulación los datos necesarios para corregir las dispersiones. El resultado es, por un lado, una carga de trabajo muy elevada para la tripulación justo después de haber pasado por los agotadores preparativos para el despegue y el lanzamiento en sí, lo que significa que los astronautas estarán probablemente bastante cansados justo en un momento crítico de la misión (aunque el acoplamiento sea totalmente automático, como es el caso de la Crew Dragon o la Soyuz, la tripulación tiene que estar lista para intervenir en caso de emergencia). Además, la tripulación no tendrá casi tiempo de comprobar los sistemas de la nave y verificar que todo funciona correctamente. Por otro lado, corregir errores en órbita no es solamente una cuestión teórica consistente en resolver ecuaciones, sino que estas desviaciones se traducen en algo muy real: un mayor gasto de combustible. Y, ni que decir tiene, el ahorro de combustible es una prioridad en cualquier misión espacial (no es que haya una gasolinera cerca, precisamente).
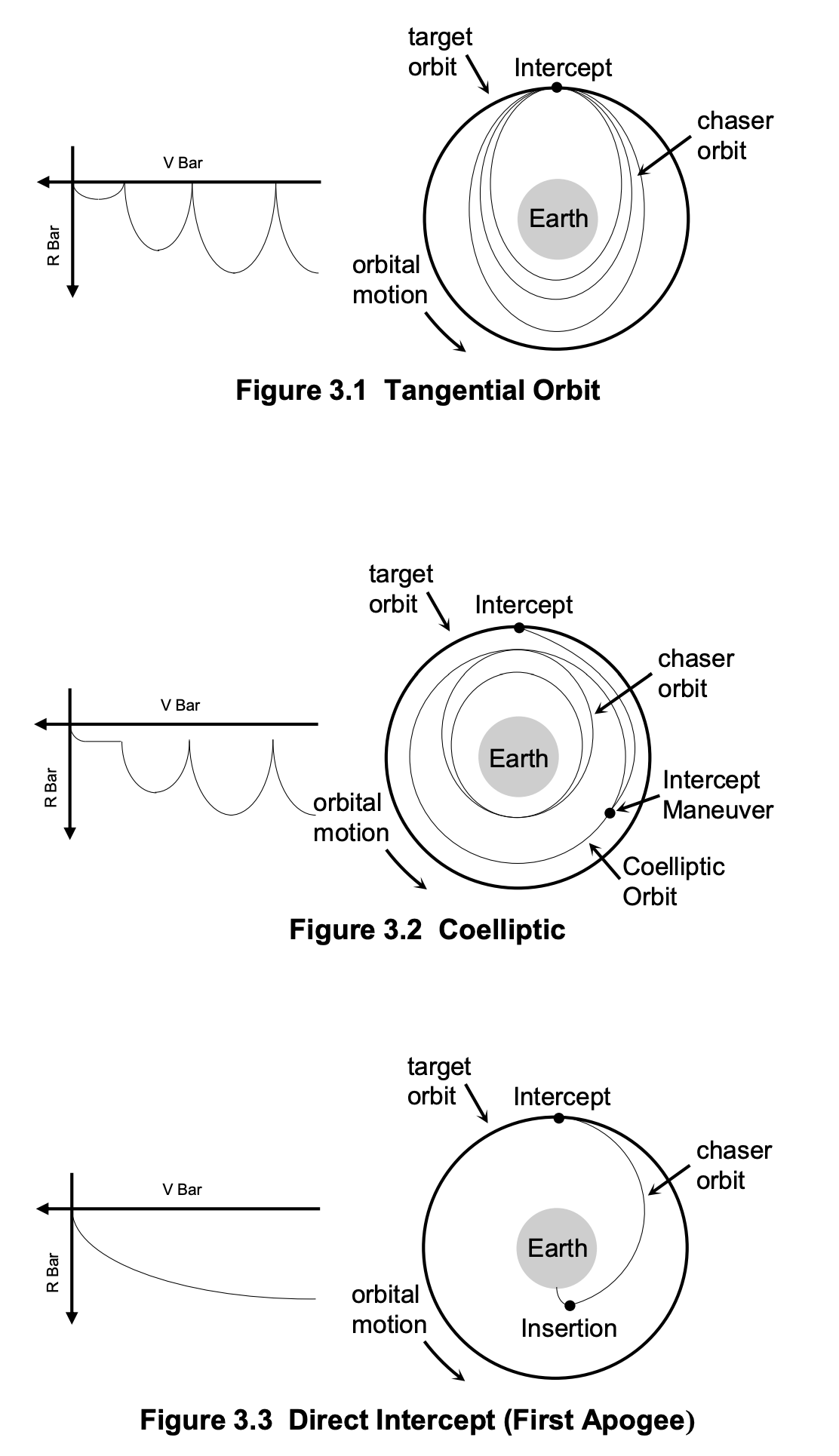
El segundo método de acoplamiento es el de la órbita tangencial. Consiste en situarse en una órbita bastante elíptica (los objetos en órbita baja siempre estarán en una órbita más o menos elíptica, pero a efectos prácticos podemos suponer que la estación espacial está en una órbita circular) con el apogeo en la órbita del objetivo e ir subiendo poco a poco el perigeo hasta alcanzar la órbita final. Estas órbitas se denominan de fase porque permiten ajustar la fase o posición relativa entre la nave y su objetivo. Es decir, permiten asegurarnos que cuando lleguemos a la órbita final la estación esté allí y no en otro lado. Como el periodo de estas órbitas es menor que el de la órbita final, ajustando la excentricidad de estas órbitas podemos elegir el tiempo que pasamos en las mismas con el fin de llegar al objetivo a tiempo. Este método permite suavizar las restricciones de la ventana de lanzamiento y nos ofrece muchas más oportunidades para acoplarnos, algo fundamental por si surge algún problema durante la fase inicial del vuelo. Para que este método sea útil, es necesario que durante el tiempo que la nave esté en la órbita de fase sea posible medir su posición (mediante radar o sistemas ópticos), de tal forma que el control de la misión será el encargado de actualizar los datos de guiado y navegación (otra posibilidad es que la nave calcule su posición y velocidad de forma autónoma, una tarea que también requiere tiempo para lograr una alta precisión).

Este método parece adecuado y, de hecho, ha sido usado en varias misiones reales (por ejemplo, en misiones del transbordador espacial que incluían la captura o encuentro con algún satélite desplegado por esta nave). El problema, una vez más, es que este método posee poca flexibilidad. La determinación de la posición y velocidad de la nave por parte del control de Tierra siempre va a tener errores y en la fase final resulta obligatorio usar sistemas de guiado y navegación autónomos. Pero si los errores son muy grandes, con este método la nave llegaría a la órbita final con muy poco margen de tiempo para corregir las posibles desviaciones usando sus propios sistemas. En el caso de la ISS, esta circunstancia puede traer aparejada un riesgo de colisión inaceptable. Además, es muy importante acoplarse en unas condiciones de iluminación adecuadas (no olvidemos que, aunque los sistemas automáticos basados en el radar o el LIDAR funcionan en la oscuridad, la tripulación debe ser capaz de acoplar la nave en una emergencia; y suele ser recomendable que puedan ver a dónde se dirigen). De media, casi la mitad del periodo de una órbita baja transcurre en la sombra de la Tierra. Esto implica que la ventana de acoplamiento efectiva es reducida, por lo que si tenemos algún error acumulado en el lanzamiento, una vez más vamos a tener que gastar más combustible del debido para corregirlo.


Por eso para las misiones a estaciones espaciales (y también para el acoplamiento del LM con el CSM Apolo en órbita lunar), el método de acoplamiento favorito es el coelíptico, que viene a ser una mezcla de los dos anteriores. Este método tiene en cuenta tanto la corrección de errores gracias a los datos suministrados por el control de Tierra y sistemas autónomos en el método tangencial como la corrección gracias a los propios sistemas de la nave en la parte final, al igual que en el caso de la intercepción directa. El método consiste en dos partes. En la primera la nave se coloca en órbitas de fase como en el método tangencial para ajustar la posición relativa con el objetivo y reducir los errores durante el lanzamiento. El apogeo de estas órbitas es inferior al del objetivo, por lo que no hay riesgo de colisión. Una vez finalizada esta parte, la nave se halla en una órbita coelíptica, que no es otra cosa que una órbita que está siempre a la misma distancia de la órbita del objetivo. Una vez en esta órbita, no tenemos más que ejecutar la maniobra propulsiva final en el momento adecuado y elevar el apogeo para llegar al objetivo usando los datos del control de Tierra y del propio vehículo en la fase de aproximación. La ventaja de este método es que, si las órbitas de fase nos dejan lejos de la posición esperada, solo tenemos que reducir o aumentar el tiempo que pasamos en la órbita coelíptica y ya está (por supuesto, se pueden combinar órbitas de fase con órbitas coelípticas para aumentar la gama de posibilidades).

En la ISS, al igual que para la Mir y otras estaciones espaciales, se usa un método con dos órbitas coelípticas (una a 10 kilómetros por debajo de la órbita final y la última a unos 2,5 kilómetros), lo que requiere dos órbitas de transferencia de Hohmann finales. La segunda órbita sirve para flexibilizar todavía más el momento del acoplamiento y para eliminar los posibles errores de la primera, con el consiguiente ahorro de combustible y la reducción del riesgo de colisión. Este método es el que se emplea para las naves Soyuz y, ahora, para las Crew Dragon. El tiempo que una nave pasa en cada etapa del acoplamiento dependerá de qué factores son los prioritarios. Como hemos visto, los principales son minimizar el gasto de combustible y asegurar que el acoplamiento tenga lugar en unas condiciones correctas de iluminación. Pero hay otros, como son los periodos de sueño o descanso de la tripulación de la nave y los de la tripulación de la estación —que no tienen por qué coincidir al principio— o intentar evitar que los escapes de los propulsores hipergólicos de la nave afecten a la estación, sobre todo a los delicados paneles solares (plume impingement), entre otros. Hace décadas había que añadir otras restricciones, como la que obligaba a que los acoplamientos tuviesen lugar sobre una estación de comunicaciones terrestre, aunque, a cambio, muchos de los primeros acoplamientos (Gemini-Agena, LM-CSM, Soyuz-Salyut, etc.) se efectuaban con objetivos que colaboraban en las maniobras usando sus propios sistemas de propulsión, lo que permitía reducir los errores y el tiempo de acoplamiento, algo imposible con la ISS, que, debido a su gran tamaño, es un blanco pasivo. Por último, la aproximación final se puede realizar siguiendo la V-bar o la R-bar, dependiendo de la prisa que tengamos y la posición del puerto de atraque (la Crew Dragon hace una aproximación R-bar por debajo y luego pasa a V-bar; el transbordador usaba R-bar porque de esta forma se frenaba de forma natural).

Como vemos, la clave no es siempre llegar lo antes posible, sino gastar el mínimo de combustible al mismo tiempo que se ajusta el momento del acoplamiento para tener en cuenta las condiciones de iluminación o los periodos de sueño de la tripulación, de ahí la diferencia en el tiempo que tardan en maniobrar los distintos vehículos. Por ejemplo, hasta hace unos años las Soyuz tardaban dos días en acoplarse con la ISS porque la precisión de la inserción orbital del cohete Soyuz no era muy elevada y porque se priorizaba el ahorro de combustible. Este perfil se ha reducido a seis horas (cuatro órbitas) y, actualmente, a tan solo tres horas (dos órbitas) gracias a una inserción orbital más precisa y al uso de sistemas digitales de guiado y navegación autónomos más avanzados, lo que prácticamente permite eliminar la etapa inicial de órbitas de fase (el ángulo de fase entre la Soyuz y la ISS tras el lanzamiento es por tanto muy pequeño). El perfil de acoplamiento actual de las Soyuz es mucho más cómodo para la tripulación, aunque no debemos olvidar que, en caso de que haya algún problema, la nave deberá consumir mucho más combustible del que se gastaría en un perfil de dos días. Pero, volviendo al principio, ¿puede entonces la Dragon acoplarse en menos tiempo? Como ya dijimos, por supuesto que puede —de hecho, en esta misión originalmente solo iba a tardar nueve horas, pero se tuvo que ampliar la duración del viaje tras retrasar el lanzamiento un día—, pero es lógico que en las primeras misiones la NASA y SpaceX hayan decidido usar un perfil más conservador para comprobar que los sistemas de guiado y navegación de la Crew Dragon son precisos y seguros. Y, de paso, se permite que los astronautas descansen antes del acoplamiento.

Más info:
Como veo que esto de los cagódromos y meódromos espaciales en microgravedad ha despertado vuestro escatológico interés, os paso unas instrucciones de uso de uno de estos servicios que a buen seguro os suena:
https://www.bluemoonpatentprints.com/listing/748347557/zero-gravity-toilet-print-2001-space
Pues nada, ya tenéis lectura para ese momento tan íntimo… ?
Off topic
pÁrese (y pongase derecho) que autorizaron al Boeing 737 Max para seguir volando.
https://www.perfil.com/noticias/bloomberg/bc-el-boeing-737-max-ya-esta-autorizado-para-volar-de-nuevo.phtml
Espero que eso irradie optimismo en Boeing y terminen su CST-100.
Qué quieres que te diga… me fío menos del 737 MAX que del Vega 🙂
Venga, OT interesante, auqnue es muy probable que Daniel haga un articulo.
RocketLab lanzo ayer un Electron que volvio exitosamente y amerizo suavemente con paracaidas. Es el primer paso antes de pescarlo en el aire con el helicoptero.
https://twitter.com/Peter_J_Beck/status/1329728110749597697
Pues me alegro por ellos. Excelente.
Tercera reentrada controlada del Electron, primera con paracaídas.
OT
Creditos iniciales de ThunderMusks
https://www.youtube.com/watch?v=tiD8nGD0Q6w
OT EXOMARS:
LA ESA COMPLETA EL PRIMER ENSAYO DE PARACAÍDAS DE EXOMARS DESDE 29 KM DE ALTURA
://www.infoespacial.com/mundo/2020/11/20/noticia-completa-primer-ensayo-altitud-paracaidas-exomars.html
OT.
Ojalá Daniel le dedique una entrada al radiotelescopio de Arecibo. Se ha anunciado el fin del proyecto después de 4 décadas.
Mañana 😉
Muchas gracias Daniel. Eres de las mejores cosas que ocurren con Internet.