

Para resolver este desafío, los ingenieros han diseñado muchos sistemas de acoplamiento, cada uno de ellos con sus propias características. En general, cualquier sistema de acoplamiento avanzado dispone de dos partes principales. Por un lado tenemos una parte capaz de amortiguar el impacto inicial, eliminar la diferencia de velocidades angulares relativas y asegurar un primer contacto («acoplamiento suave») entre las naves. Por otro lado, debe haber una manera de garantizar un acoplamiento rígido entre los dos vehículos («acoplamiento firme»). Por eso mismo, y a pesar de su variedad, todos los sistemas diseñados entran en una de las categorías siguientes:
Sistema de tipo cono-cono (Gémini): es el más sencillo y solamente se ha usado en el programa Gémini de la NASA. Como su nombre indica, consiste en un sistema receptor de forma cónica en el que se introduce el morro de la nave activa (en este caso, la cápsula Gémini), también de forma aproximadamente cónica.
Sistema de tipo sonda-cono (Soyuz/Salyut/Almaz/TKS/Mir/Apolo/Skylab): también conocido como sistema «macho-hembra» o «activo-pasivo», es el sistema que ha sido empleado en el mayor número de misiones espaciales. En este tipo de sistema, la nave «activa» incorpora una sonda que se introduce en el cono receptor que lleva la nave «pasiva». La ventaja de este sistema es que no es necesario un alineamiento perfecto entre las naves, ya que la sonda se desliza por la superficie del cono receptor hasta alcanzar el receptáculo central, donde es capturada (acoplamiento suave). Es un sistema especialmente recomendable cuando uno de los vehículos es siempre el activo, es decir, realiza todas o la mayor parte de maniobras de aproximación. Obviamente, dos naves activas o dos pasivas (es decir, dos «machos» o dos «hembras») no pueden acoplarse entre sí, lo que constituye el principal inconveniente de este sistema.
Sistemas de tipo andrógino (Apolo-Soyuz/Burán/Shuttle-Mir/ISS/Shenzhou-Tiangong): en principio, dos naves cualesquiera equipadas con este sistema pueden acoplarse entre sí sin problemas, evitando así las limitaciones del sistema sonda-cono (aunque ya veremos que hay excepciones). En este sistema, la sonda ha sido sustituida por un anillo de acoplamiento dotado de varios «pétalos» (orientados hacia dentro o hacia fuera) que amortiguan la velocidad relativa entre ambos vehículos y permiten un acoplamiento suave inicial. Al ofrecer el anillo de acoplamiento una superficie mayor que la de la sonda, es un sistema que permite minimizar las tensiones estructurales de la maniobra. Por este motivo es muy recomendable su uso en naves de gran tamaño.
Otros sistemas: a lo largo de la historia de la astronáutica se han diseñado algunos sistemas que no encajan en la descripción de ninguno de los arriba mencionados. Los más importantes son el sistema Kontakt, creado para el programa lunar tripulado soviético N1-L3 y el sistema CBS, usado en los módulos del segmento norteamericano de la estación espacial internacional (ISS).
Veamos cada sistema por separado:
Gémini
Uno de los objetivos de las misiones Gémini de los años 60 fue probar las técnicas de aproximación y acoplamiento en el espacio de cara a los vuelos lunares del Apolo. Para simplificar los costes y acelerar el desarrollo del programa, se decidió no acoplar dos naves tripuladas Gémini entre sí y emplear un cohete Agena-D GATV (Gemini-Agena Target Vehicle) para este cometido (también se usó otro vehículo parecido, el Augmented Target Docking Adapter, en la Gémini 9, pero la tripulación fue incapaz de completar el acoplamiento al no desprenderse la cofia de la etapa). El sistema de acoplamiento era muy sencillo, consistente en un cono receptor en el Agena con unos cerrojos que se cerraban alrededor del morro de la Gémini para asegurar el acoplamiento.


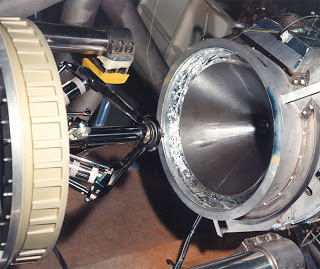
Acoplamiento de una Gémini con el Agena (NASA).
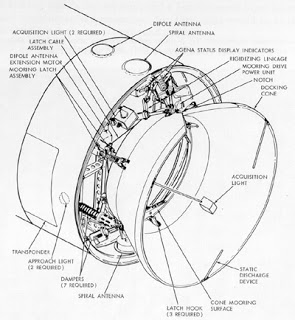


Sistema de acoplamiento en el programa Gémini (NASA).
El primer acoplamiento de la historia entre dos naves espaciales se produjo en marzo 1966, cuando la Gémini 8 con Neil Armstrong y David Scott se unió con el Agena GATV-6, una misión que a punto estuvo de costarle la vida a ambos astronautas. Durante el programa Gémini se llevaron a cabo cuatro acoplamientos exitosos con etapas Agena, todos ellos en 1966.
Apolo
Para el programa Apolo fue preciso desarrollar un sistema de acoplamiento más avanzado que el del Gémini. No solo era necesario que el módulo de mando (CSM) permaneciese firmemente acoplado al módulo lunar (LM), sino que además la tripulación debía poder pasar de un vehículo a otro sin necesidad de realizar un paseo espacial (EVA). Para ello, los ingenieros idearon un sistema de tipo sonda-cono con una escotilla de un diámetro de 76 centímetros. El CSM llevaba una sonda retráctil situada en la parte superior de tres brazos plegables. Dicha sonda estaba equipada con tres cerrojos en el extremo que se unían a un sistema de captura localizado en el centro del cono de acoplamiento del módulo lunar, logrando de esta forma un acoplamiento suave. El acoplamiento firme se conseguía mediante una serie de motores que replegaban la sonda, tirando del CSM en el proceso hasta que las dos escotillas estuviesen en contacto. En ese momento, doce cerrojos situados en el extremo de la escotilla CSM se cerraban garantizando un acoplamiento estanco.


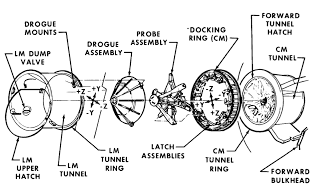







Para permitir el paso de la tripulación de una nave a otra sin obstáculos, la sonda plegable era desmontable. Puesto que existía el peligro de que la sonda se quedase atascada en el cono del LM, ésta estaba dotada de pernos explosivos que habrían liberado al CSM en caso de emergencia. La sonda se desechaba tras la separación del LM en órbita lunar, una vez completada la visita a la superficie de nuestro satélite. El alineamiento fino entre los vehículos se realizaba de forma visual por parte de la tripulación gracias a marcas y signos externos situados en el LM. El sistema de acoplamiento del Apolo sería el primero dotado de un túnel presurizado entre dos naves espaciales y fue usado por primera vez en 1969 durante la misión Apolo 9. No obstante, el sistema del Apolo carecía de conexiones eléctricas o hidráulicas integradas.
Primeras Soyuz
La nave Soyuz fue creada originalmente para llevar a cabo misiones lunares y en órbita baja, por lo que la necesidad de disponer de un sistema de acoplamiento era tan acuciante para los ingenieros soviéticos como para los norteamericanos. Al no disponer de un equivalente del programa Gémini, la URSS se vio obligada a desarrollar un sistema de acoplamiento complejo con poca experiencia de vuelo. Se decidió entonces que las primeras misiones de acoplamiento entre naves Soyuz en órbita terrestre no dispondrían de un túnel presurizado, a diferencia del sistema Apolo. Los cosmonautas deberían pasar de una nave a otra mediante un paseo espacial, aunque lejos de ser una desventaja, esta maniobra permitiría ganar experiencia en EVAs de cara al programa lunar.
Al igual que sus colegas estadounidenses, los ingenieros soviéticos se decantaron por un sistema de acoplamiento del tipo sonda-cono. Una sonda plegable se encargaría de llevar a cabo el acoplamiento suave, pero a diferencia del sistema del Apolo, formado por tres brazos plegables, la sonda era un mástil telescópico. Además, el acoplamiento en firme no se lograba medianet cerrojos situados en el túnel de acoplamiento (del que carecían las primeras Soyuz 7K-OK), sino mediante varios conjuntos de ganchos localizados en el exterior del anillo de acoplamiento de ambas naves. Tanto la nave activa, dotada de la sonda, como la pasiva, con el cono, tenían el mismo anillo de acoplamiento, con el mismo número de ganchos. Este sistema fue desarrollado por los ingenieros de la OKB-1 de Serguéi Koroliov teniendo en cuenta futuras misiones con estaciones espaciales, ya que se podía modificar el anillo fácilmente para dotarlo de conexiones eléctricas o hidráulicas entre los vehículos.




El primer acoplamiento de dos naves espaciales soviéticas tuvo lugar en 1967, cuando las naves Soyuz Kosmos 186 y Kosmos 188 se unieron en órbita baja. También fue el primer acoplamiento automático de dos vehículos espaciales. Y es que a diferencia de las naves Apolo, basadas en un sistema de aproximación final y acoplamiento totalmente manual, las Soyuz fueron creadas desde un primer momento para permitir acoplamientos automáticos. El primer acoplamiento de dos naves Soyuz tripuladas tuvo lugar el 16 de enero de 1969, cuando se unieron las Soyuz 4 y Soyuz 5. Alexéi Yeliseyev y Yevgueni Jrunov realizaron una EVA para pasar de la Soyuz 5 a la Soyuz 4, una maniobra que debían haber llevado a cabo originalmente las tripulaciones de la Soyuz 1 y Soyuz 2, aunque lamentablemente los problemas que experimentó la Soyuz 1 impidieron su realización (problemas que se saldaron con la muerte de Vladímir Komarov).
N1-L3
El programa lunar de alunizaje soviético N1-L3 no necesitaba de un sistema de acoplamiento tan complejo como el empleado en el Apolo. Durante el trayecto hacia la Luna, el módulo lunar LK estaba situado debajo de la Soyuz LOK en el interior de una cofia protectora. Para pasar de la Soyuz LOK al LK, el cosmonauta debería realizar una EVA en órbita lunar. El acoplamiento entre las dos naves solamente se produciría después de regresar el LK de la superficie lunar. Para garantizar la unión, se creó el sistema Kontakt, formado por una rejilla de un metro de diámetro con 108 hexágonos situada en la parte superior del LK. La Soyuz LOK, la nave activa en esta operación, iba equipada con un sistema simple de cuatro patas que se podían enganchar con la rejilla del LK independientemente de la orientación relativa de los vehículos. El sistema Kontakt debía haberse probado en el espacio mediante un acoplamiento de dos naves Soyuz, pero finalmente jamás alcanzó la órbita. Aunque era un sistema claramente rudimentario, cumplía sobradamente con su función y además permitía ahorrar una masa considerable en los vehículos lunares.



Soyuz-Salyut-Mir
Tanto para las estaciones espaciales DOS (Salyut), desarrolladas por NPO Energía (antes OKB-1), como para las estaciones militares OPS (Almaz), creadas por la OKB-52 de Vladímir Cheloméi, fue necesario crear un sistema de acoplamiento dotado de un túnel presurizado. Este sistema sería ligeramente modificado a lo largo de los años, aunque ha permanecido casi igual desde la entrada en servicio de las Soyuz-T (7K-ST) en 1979 y es similar al utilizado hoy en día en el segmento ruso de la ISS por las naves Progress y Soyuz rusas, así como el ATV europeo. Este sistema también fue empleado para el acoplamiento de módulos pesados en las estaciones Salyut, Mir y en la ISS. Estos módulos son derivados de las naves de transporte TKS, creadas originalmente para las estaciones OPS (Almaz). Para estas naves se ideó un sistema de acoplamiento más grande que el de la Soyuz -aunque compatible con éste- para aguantar las mayores tensiones estructurales derivadas de la mayor masa de estos vehículos (veinte toneladas de las TKS frente a las siete de una Soyuz). La principal diferencia del sistema de la TKS es que la sonda de acoplamiento no era fija, sino que podía moverse un cierto ángulo con respecto a la base y de este modo se suavizaban las cargas estructurales.


Anillo de acoplamiento de una estación Almaz-OPS (Novosti Kosmonavtiki).

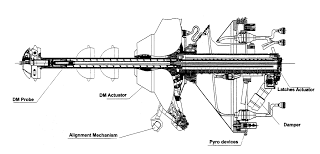
Sistema de acoplamiento de una nave de carga TKS (KB Salyut).
El sistema de acoplamiento entre la Soyuz y las estaciones espaciales se denomina oficialmente Sistema de Acoplamiento y Transferencia o SSVP (Система Стыковки Внутреннего Переохода, ССВП). Existen dos tipos de SSVP, el activo, utilizado por la Soyuz, Progress o ATV y denominado Aparato de Acoplamiento Activo, ASA (Активный Стыковочный Агрегат, АСА), y el sistema pasivo, llamado Aparato de Acoplamiento Pasivo, PSA (Пассивный Стыковочный Агрегат, ПСА).
El sistema activo, ASA, dispone de una sonda extensible denominada Mecanismo de Acoplamiento, SM (Стыковочный Механизм, СМ), localizado sobre la escotilla de la Soyuz. La cabeza de la sonda está equipada con cerrojos que se ajustan al cono del PSA para garantizar el acoplamiento suave («Primer Enlace Mecánico»). Una vez efectuado este acoplamiento, varios motores situados en la base del SM se encargan de plegar la sonda, uniendo la Soyuz con la estación en el proceso. El SM es desmontable para facilitar el paso de la tripulación de una nave a otra y está dotado de pernos explosivos para liberar la sonda en caso de que ésta se atasque en el cono del PSA y no permita la separación de la Soyuz.




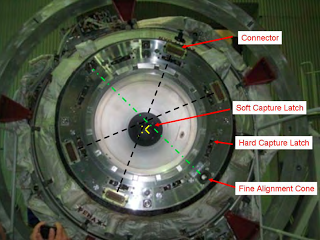
Detalles del cono receptor del SSVP.






Lo anillos de acoplamiento externos reciben el nombre de Mecanismo de Hermetización del Acoplamiento, MGS (Механизм Герметизации Стыка, МГС), en el caso de la Soyuz, y Mecanismo de Hermetización de la Cubierta, MGK (Механизм Герметизации Крышки, МГК), para los puertos de atraque de la estación, aunque en realidad son prácticamente idénticos. Una vez que los dos anillos de acoplamiento están en contacto, se produce el acoplamiento en firme («Segundo Enlace Mecánico») mediante la actuación de ocho pares de ganchos en cada nave. Cada par se une a su pareja de la otra nave, asegurando el acoplamiento. El anillo está dotado además de cuatro conectores eléctricos (que permiten que la Soyuz o Progress se alimente de la energía de la estación), dos hidráulicos (que permiten trasvase de combustible en el caso de la Progress y los ATV), dos conectores de alineamiento fino y dos muelles para asegurar una separación suave de los vehículos sin necesidad de usar los propulsores. Dos anillos de goma aseguran la estanqueidad de la unión.
El sistema SSVP tiene una masa de 200 kg y requiere una velocidad de aproximación del orden de 0,1-0,35 m/s para garantizar el acoplamiento suave. Permite errores en la alineación de ±7º en guiñada y cabeceo, y ±10º en el ángulo de giro. El mecanismo de retracción de la sonda ejerce una fuerza de 1500 kgf.

APAS
Con ocasión de la misión conjunta Apolo-Soyuz se decidió desarrollar un nuevo sistema de acoplamiento andrógino que superase las limitaciones del sistema sonda-cono. Al fin y al cabo, ninguna de las dos potencias quería aparecer como aquella que aportaba la nave «pasiva» en la misión. El sistema finalmente elegido fue denominado APAS, unas siglas similares tanto en ruso como en inglés (Androgynous Peripheral Attach System o Androgynous Peripheral Assembly System y Андрогинно-Периферийный Агрегат Стыковки). En vez de emplear una sonda y un cono, el sistema APAS usaba un anillo de acoplamiento con pétalos metálicos que guiaban las dos naves durante la maniobra. La nave activa desplegaba el anillo con amortiguadores, mientras que la pasiva lo mantenía plegado. Cualquier nave equipada con un sistema APAS podía en principio actuar como vehículo pasivo o activo simplemente plegando o desplegando el anillo de acoplamiento. Una vez garantizado el acoplamiento suave, el acoplamiento en firme se realizaba de forma similar al sistema usado en las estaciones Salyut.
Después de estudiar múltiples configuraciones, los ingenieros soviéticos de NPO Energía se decantaron por un sistema andrógino con pétalos instalados hacia fuera, un sistema que sería denominado finalmente APAS-75. Este sistema sólo sería usado una única vez, durante la misión Apolo-Soyuz ASTP de 1975 (en este caso, la Soyuz 19 actuó como nave pasiva con el anillo plegado). La Soyuz 16 también viajó al espacio con un sistema APAS-75 como ensayo general para la misión Apolo-Soyuz, aunque no se acopló con ningún vehículo.

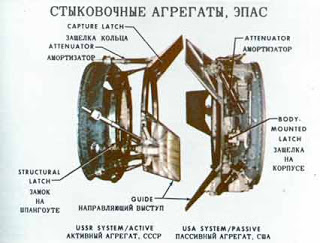




APAS-75 (NASA/Novosti Kosmonavtiki).
Tomando como base el APAS-75, se decidió emplear un sistema parecido para el programa del transbordador soviético Burán denominado APAS-89, pero con los pétalos de guiado orientados hacia el interior. De esta forma se lograba un sistema más compacto (1,5 metros en vez de los 2 metros del APAS-75) y más ligero, aunque el túnel interior tenía el mismo diámetro que el de la Soyuz (80 centímetros). El anillo de acoplamiento estaba dotado de seis amortiguadores desplegables, pero a diferencia del APAS-75 o el SSVP del Soyuz, el APAS-89 está dotado de doce cerrojos estructurales para el acoplamiento firme en vez de ocho. El APAS-89 fue lanzado al espacio por primera vez en 1989 -de ahí su nombre- a bordo del módulo Kristall de la Mir. Este módulo estaba dotado de dos puertos APAS-89 para acoplamientos con el Burán y su carga útil, pero finalmente sería usado para la primera misión con el transbordador espacial norteamericano. Estos puertos eran pasivos, es decir, carecían de un anillo externo desplegable. Posteriormente, el módulo Kristall recibió un módulo de acoplamiento con dos puertos APAS-89 que sería usado por el resto de misiones del transbordador norteamericano. La Soyuz TM-16 sería la única nave soviética que emplearía el APAS-89 en una misión espacial. Hay que tener en cuenta que una desventaja de este sistema es que resulta más pesado que el SSVP tradicional (unos 280 kg frente a 200 kg).


La versión del APAS usada en el transbordador norteamericano es una copia del APAS-89, aunque a veces se le denomina APAS-95 porque la primera misión de acoplamiento entre la Mir y el shuttle tuvo lugar en 1995. Este sistema sería usado también en la ISS por el transbordador, ya que la NASA prefirió elegir el sistema ruso -ya probado- antes que certificar alguno de los sistemas andróginos norteamericanos que se hallaban en fase de desarrollo, como el LIDS. A pesar de ser un sistema andrógino, los transbordadores dotados de APAS no podían acoplarse entre sí, ya que el anillo de acoplamiento no sobresalía de la bodega de carga. Precisamente, para evitar este problema los transbordadores del programa Burán debían haber empleado un túnel desplegable dotado del APAS-89.



ISS
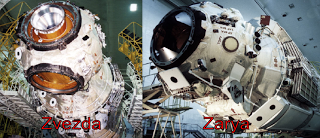
La ISS emplea varios sistemas de acoplamiento al mismo tiempo. En el segmento ruso existen dos sistemas, el SSVP usado por las Soyuz, Progress y ATV, y el SSVP-M, empleado en los tres puertos delanteros del Zvezdá. El sistema SSVP-M (ASA-G/ASP-G) es híbrido, con un cono central similar al SSVP y un anillo de acoplamiento externo idéntico al del APAS. Este sistema híbrido ha sido usado en los pequeños módulos Pirs y Poisk (acoplados con el Zvezdá), así como para conectar los módulos Zaryá y Zevzdá entre sí. También será usado en el futuro módulo Nauka (MLM). La ISS es la primera estación espacial donde se emplea el sistema ruso híbrido SSVP-M.

Como hemos visto, el segmento norteamericano (USOS) emplea dos puertos de atraque APAS (también denominado APDS) situados en los módulos PMA, que en el futuro serán usados por la próxima nave tripulada norteamericana. Para unir los módulos del segmento norteamericano entre sí se eligió el sistema CBM (Common Berthing Mechanism), también empleado para acoplar las naves de carga norteamericanas Dragon y Cygnus, así como el HTV japonés. El sistema CBM emplea escotillas de gran tamaño, de 127 cm de diámetro, lo que facilita el movimiento de cargas voluminosas entre los módulos. No se trata de un sistema andrógino, por lo que una de las naves debe estar equipada con una parte activa (ACBM) y otra con un sistema pasivo (PCBM). Las naves de carga están dotadas de un PCBM, mientras que el módulo Harmony dispone de puertos ACBMs. El ACBM permite el acoplamiento mediante un anillo activo consistente en en 16 tornillos y 4 pestillos. El CBM no es un sistema de acoplamiento autónomo propiamente dicho, ya que para garantizar el perfecto alineamiento de los vehículos y el acoplamiento suave es preciso usar el brazo robot de la ISS (o antes el brazo robot del shuttle).




Sistema CBM (NASA).
Shenzhou-Tiangong
Para acoplarse con las estaciones espaciales Tiangong, las naves chinas Shenzhou utilizan un sistema de acoplamiento andrógino que es claramente un clon del APAS-89 ruso (de ahí que a veces se le denomine APAS-2010), aunque China ha declarado en repetidas ocasiones que ha sido desarrollado de forma independiente. Se desconocen las diferencias concretas entre el sistema chino y el APAS-89, pero está claro que una Shenzhou podría acoplarse con la ISS sin necesidad de muchas modificaciones.

iLIDS/NDS
El sistema andrógino APAS es el favorito de los ingenieros, pero tiene un problema, y es que está protegido por las leyes de patentes rusas. Por este motivo la NASA ha desarrollado el sistema iLIDS (international Low Impact Docking System, antes conocido como LIDS). El LIDS fue creado en los años 90 a partir del APAS-75 y posteriormente se pensó usarlo en el programa X-38. Con el fin de garantizar un acoplamiento más suave que el del APAS-89, el sistema LIDS emplea un sistema de varios imanes. El nuevo iLIDS, una variante reciente del LIDS, cumple con los requisitos del IDSS (International Docking System Standard), un intento de desarrollar un sistema de acoplamiento totalmente internacional (aunque Roscosmos no lo ha apoyado formalmente, probablemente por miedo a perder la hegemonía del APAS). Por esta razón, el iLIDS se considera el principal candidato para ser el futuro NDS (NASA Docking System), un sistema de acoplamiento libre de las ataduras de las patentes rusas. Eso sí, el NDS está protegido a su vez por una patente de los EEUU. El iLIDS permite un túnel con un diámetro de 685 mm, ampliables a 813 mm retirando los pétalos de acoplamiento, frente a los 800 mm del APAS-95. Todos los demás sistemas de captura y conexiones son idénticos al APAS-89 ruso. No obstante, ni el iLIDS ni el NDS son compatibles con el APAS, así que habrá que crear un adaptador en los módulos PMA de la ISS dotados con el APAS para permitir el acoplamiento de las futuras naves que usen este sistema. El telescopio espacial Hubble fue equipado durante la última misión de servicio con un sistema LIDS no presurizado.



LIDS/NDS (NASA).

Adaptadores propuestos para usar el sistema NDS en la ISS (NASA).

Por su parte, RKK Energía ha desarrollado una variante del APAS-89 más compacta y ligera, muy parecida al iLIDS/NDS de la NASA. En teoría, la futura nave rusa PTK-NP debería usar un sistema sonda-cono SSVP tradicional, pero también podría emplear el futuro APAS. La NASA aún debe decidir qué sistema usará la futura nave tripulada de los EEUU (Dragon, Orión, CST-100, etc.), aunque lo más probable es que, al menos inicialmente, use un APAS-95.


Impresionante articulo Daniel!
Solo que aun no me queda claro como es el transvase de combustible entre dos naves.
A ver si un día le dedico un post 😉
Estimado Daniel, de vez en cuando entro en «crítica» constructiva con algún artículo… que si muy pro-ruso… que si…
En fín.
Pero todo palidece frente a artículos como este.
Solo se me ocurren, a voz de pronto, epítetos como GENIAL, MONSTRUOSO, BESTIAL y parecidos.
De verdad, la de horas de trabajo que debe de haber costado este artículo. Daniel, ?tienes vida? Me refiero… a vida de salir a tomarte un helado por la tarde ???¿?¿?¿?
Un Cordial saludo.
Y de nuevo: MAGNÍFICO ARTÍCULO.
Jeje, tengo vida, sí. Y realmente me cuesta lo suyo encontrar tiempo para escribir en el blog, aunque no lo parezca.
Gracias y un saludo.
Sobresaliente.
Un artículo muy clarificador.
Muchísimas gracias por el articulo Daniel. Llevaba tiempo dándole vueltas a este asunto y me has aclarado muchas dudas.
Un saludo
que bueno, me preguntaba muchas cosas de estas! genial!!!! no es lo mismo leer en ingles de todo esto, a pesar que lo domino se agarro confusiones. saludos!
Magnifica entrada, Daniel, nos tienes cada vez más mal acostumbrados.
Excelente artículo Daniel!!!!!!!
Ya sé que no es específicamente sistema de acoplamiento, pero sabes como era la comunicación entre el SM y el CM de la apollo? ya que debajo del CM se encuentra el escudo térmico.
Muchas Gracias!
Si te refieres a los umbilicales con oxígeno y electricidad, estaban situados en el exterior de ambos módulos. Mira este esquema:
http://2.bp.blogspot.com/_b1AE8x4eLKI/Sl5lo7UOeAI/AAAAAAAAMhI/XfOdUTtX_4E/s1600-h/Imagen+65.png
Si te refieres a la unión entre ambos módulos, se lograba por seis puntos de apoyo sitiados en el SM:
http://4.bp.blogspot.com/_b1AE8x4eLKI/Sl5mEOeXnvI/AAAAAAAAMho/65Otti93QGU/s1600-h/Imagen+59.png
Saludos
Muchas gracias!
Acojonante artículo. El tiempo pasa, pero el nivelazo de Eureka no decae.
Respecto al problema de que la velocidad tenga que ser la justa, y no demasiado lenta, creo que la idea reciente de usar el brazo robot para los últimos metros ha ayudado bastante, ya que con él es mucho más fácil controlar este tema. Las naves sólo deben ajustar su propulsion para aproximarse hasta la distancia del brazo, y luego es ya todo mecánico.
Gracias, monsieur. Efectivamente, el acoplamiento mediante el brazo robot tiene esa ventaja, pero el problema es que no resulta muy adecuado para misiones tripuladas. El brazo se controla manualmente, así que imagínate lo que pasaría en el caso de una emergencia que requiriese un desacople de una nave mediante el CBS. Por eso las futuras naves tripuladas usarán un APAS/NDS.
Saludos.
Me sumo a las felicitaciones. Entra a formar parte de los-que-no-te-puedes-perder de Eureka.
Gracias.
Genial post Daniel!.
Por cierto, ¿Porque los rusos no se han decantado en usar más el APAS para los acoplamientos soyuz/ISS en vez del acoplamiento sonda/cono?,¿Es que el APAS es más caro,o complejo ?
Gracias.
Principalmente porque es un sistema más pesado y para naves pequeñas como la Soyuz o la Progress no es tan ventajoso.
Saludos.
Excelente entrada. Felicidades Daniel!
La leche Daniel cómo te castigas.
Impresionante artículo …
Gracias.
Un artículo sensacional.
¿Cómo funciona la aproximación entre las naves? A mi me sigue pareciendo casi magia que las naves consigan aproximarse suavemente hasta poder acoplarse. Los motores de maniobra deben de ser sumamente precisos para poder acercarse.
Pues sí, ese es otro tema que merecería un post aparte 🙂
Saludos
Me sumo a la gratitud por tu trabajo.
Carlos Ruiz.
Muchas gracias a todos/as por los comentarios y por las palabras de apoyo. Se agradecen.
Saludos.
Solo puedo decir, excelente entrada.
Muy padre y completo el articulo, hace unos dias me entro la duda esto de los acoples y esto biene de maravilla.
Vale se te agradece.
Gran artículo, pero yo lo renombraría a… «El kamasutra de las naves espaciales» 😉
Cuando leí la parte de que ninguna de las dos potencias quería aparecer como aquella que aportaba la nave «pasiva» en la misión, me recordó cuando leí el libro 2010 donde decía que las operaciones de acoplamiento tenían claras connotaciones sexuales y que uno de los primeros cosmonautas fue reprendido por ser demasiado expresivo al relatar el… clímax de la misión.