

En las últimas décadas se han propuesto varias sondas aéreas para explorar Marte, desde globos y zepelines hasta aviones. Sin embargo, ninguna de estas propuestas ha contado con los helicópteros. A primera vista, esta decisión tiene su lógica. La atmósfera de Marte es tan tenue que hacer volar un helicóptero no sería tan sencillo como en la Tierra, ¿pero es posible?

¡Pues por supuesto que sí! Naturalmente, para compensar la bajísima densidad de la atmósfera del planeta rojo (0,7% de la terrestre) los helicópteros marcianos deberían ser algo distintos a lo que estamos acostumbrados. De entrada, las superficies de sustentación -las palas del rotor, vamos- deberían ser más grandes y/o girar más rápidos. Además los helicópteros deberán ser más ligeros, aunque en este punto la baja gravedad de Marte (un tercio de la terrestre aproximadamente) ayudará a cualquier hipotética aeronave que se aventure en los cielos de este planeta. La limitación de la masa hace que sea muy complicado diseñar un helicóptero marciano tripulado de gran tamaño, pero eso no es obstáculo si lo que queremos es construir una sonda de pequeñas dimensiones, o lo que es lo mismo, un drone.
La aerodinámica de los vehículos aéreos marcianos es un tema ciertamente complejo, pero basta con señalar que volar en Marte presenta una serie de desafíos únicos. Por ejemplo, la baja densidad provoca que las superficies aerodinámicas tengan que diseñarse para una combinación única de números de Reynolds muy bajos y números de Mach muy altos (el número de Reynolds mide la viscosidad de un fluido -en este caso la atmósfera-, que es mayor a números de Reynolds más bajos, mientras que el número de Mach es la velocidad del sonido). Curiosamente, el rango de número de Reynolds que un avión marciano podría encontrar es comparable al que experimentan las maquetas o los aviones de muy pequeño tamaño en la Tierra cuando vuelan a velocidades muy bajas. Para un helicóptero esto significa que los rotores tendrían números de Lock pequeños (el número de Lock es la proporción entre las fuerzas aerodinámicas y las fuerzas inerciales que actúan sobre la superficie del rotor).
En cualquier caso, la NASA lleva investigando el posible uso de helicópteros en Marte desde hace más de quince años. Las ventajas de usar este tipo de aeronaves son evidentes. A diferencia de los aviones, los helicópteros pueden sobrevolar una zona de especial interés o aterrizar después de cada sesión de vuelo (puesto que no hay pistas de aterrizaje en Marte, un avión marciano debería volar durante todo el transcurso de su misión). Además, podrían cubrir un rango de distancias mayor que un rover. A cambio, la carga científica que serían capaces de transportar estaría muy limitada.
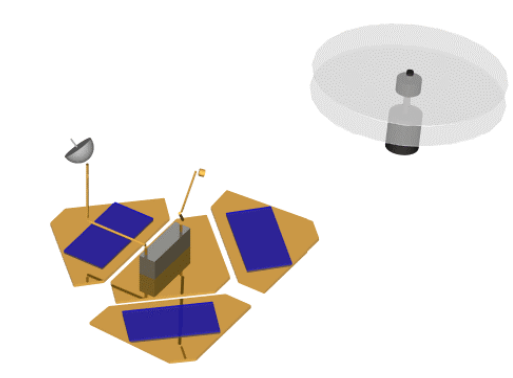
A principios de este siglo el JPL propuso una sonda de bajo coste basada en el diseño de la Mars Pathfinder y los MER. Un pequeño helicóptero de 10-20 kg viajaría dentro de la estructura tetraédrica característica de estas misiones y, tras aterrizar mediante una combinación de airbags, paracaídas y retrocohetes, los pétalos se abrirían y el drone volaría alrededor de la nave nodriza hasta una distancia de diez kilómetros. La aeronave volaría sobre las zonas interesantes durante unos pocos minutos, tomando imágenes de alta resolución. Tras realizar un vuelo de media hora aproximadamente, el drone regresaría a la nave nodriza para transmitir sus datos y recargar sus baterías. También recargaría el combustible del sistema de propulsión, formado por células de combustible o una pequeña turbina de hidrazina. Esta misión, que nunca fue aprobada por la NASA, habría tenido una duración de unos dos meses. Obviamente, los riesgos intrínsecos a esta propuesta eran enormes (si el helicóptero no lograba acoplarse a la nave nodriza tras cada vuelo, adiós a la misión).
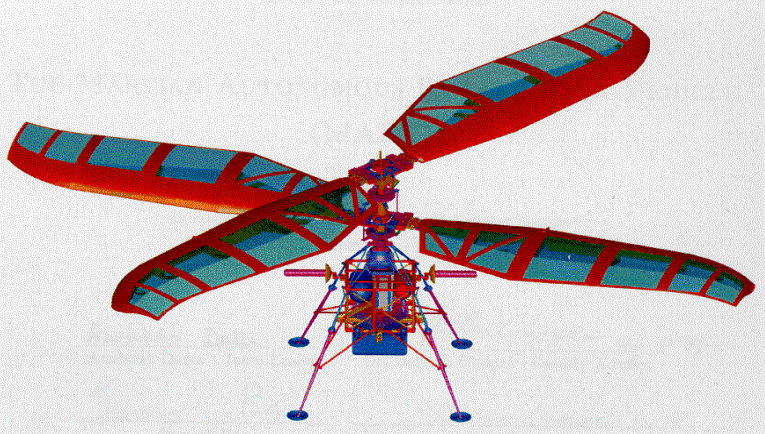
La última iteración de la propuesta de helicópteros marcianos consiste en una pequeña aeronave que funcionaría como complemento del futuro rover de 2020. Este helicóptero ultraligero volaría dos o tres minutos al día, desplazándose una media de 500 metros. De esta forma, el pequeño drone analizaría la superficie que rodea al rover y ayudaría al control de tierra a llevar a cabo una navegación más eficiente. El helicóptero tendría un pequeño panel solar que le permitiría generar la energía necesaria para realizar estos vuelos y mantenerse caliente durante la gélida noche marciana. El vehículo debería ser totalmente autónomo durante el vuelo y estaría dotado de un sistema de aterrizaje inteligente.
Para compensar la baja densidad de la atmósfera marciana, el minúsculo explorador usaría dos rotores contrarrotatorios que girarían a 2400 rpm. El JPL ya ha llevado a cabo varias pruebas con prototipos en cámaras de vacío, aunque ciertamente las posibilidades de que esta misión sea aprobada por la NASA son bastante bajas (es una misión barata, sí, pero también muy arriesgada). ¿Veremos algún día un helicóptero en Marte?
Vídeo sobre el último concepto de helicóptero marciano del JPL:
[youtube]http://youtu.be/vpBsFzjyRO8[/youtube]
Referencias:
- http://www.jpl.nasa.gov/news/news.php?feature=4457
- http://halfdome.arc.nasa.gov/publications/files/Young_ERF01.pdf
- http://www.nasa.gov/audience/foreducators/k-4/features/F_Helicopters_on_Mars_prt.htm
- https://www-robotics.jpl.nasa.gov/publications/Richard_Volpe/isairas%202014%20paper,%20volpe,%20v8.pdf
Esto me recuerda al episodio V de star wars, cuando una sonda del imperio llega al planeta Hoth y empieza a sobrevolarlo en busca de los rebeldes… 🙂
No hay comparación. El dirigible es lo mas factible para exploración aérea marciana.
Me parece lo mejor , seria mucho mas eficiente , un globo con una buen volumen.
Ya… pero el problema de un dirigible es… dirigirlo, maniobrar un gran dirigible en la tierra es relativamente sencillo (relativamente), uno pequeño es más complejo. No termino de verlo nada ventajoso.
Otra cosa sería que hablasemos de una sonda «entera» voladora, en ese caso yo sí veo mejor el tema del dirigible, pero para un pequeño accesorio de exploración para apoyar un rover, veo más sencillo y menos costoso en términos de masa, un helicóctero de este tipo.
Exacto, además no estamos hablando de algo orientado a explorar Marte a lo bestia, sino de un «mosquito» de apoyo al rover para mapear de antemano con vuelos bien definidos. Los dirigibles por ahora mucho mejor en Venus.
De acuerdo… apoyaba el comentario de Chatito , puesto que he trabajo con elementos electrónicos y se lo que se consume levantar una masa de esta forma, obvio que la Nasa son gente extremadamente estudiada tienen sus razones y son muy respetables sus propuestas , igual también me gusta el tema de un helicóptero por lo maniobrable que es , pero , la cantidad de energía necesaria para recargar sus células va a ser considerable (lo digo por ese «micropanel» solare que tiene sin contar hasta donde tengo entendido la eficiencia máxima de un panel solar no supera el 40%) así sea algo pequeño, sin contar que tiene que alimentar equipamiento de control autónomo y comunicaciones que eso también tiene su respectiva carga.
Por cierto , cuando vi esta película en su tiempo me encanto la idea de explorador aéreo en Marte , lastima que en la realidad no se hagan maquinas tan «robustas» como lo pintan en las películas : https://www.youtube.com/watch?v=IpF691nGMW8
Me gusto mas este video , es mas puntual a lo que me refiero , minuto 0:58 :
https://www.youtube.com/watch?v=8ZKITq_2ORw
Que pasaría si el helicóptero se diera vuelta? Se acá la misión?
Lo mismo me preguntó del rover
Yo propongo un dirigible a gran altura con un mecanismo que baje (sea mediante una cuerda u otra forma) una nave sujeta a su extremo y que ésta se estabilice por medio de pequeños rotores. A gran altura los dirigibles no son afectados por la tormenta marciana y proveen una estabilidad más que aceptable, además de que la carga útil sería considerable. Para mi sería una buena opción.
Este dirigible puede usarse como medio de transporte de instrumentos y la pequeña nave se encargaría de «enganchar» a éstos para ser transportados a otro lugar.
La superficie del dirigible pudiera estar cubierta de celdas solares para producir electricidad.
muy interesante, pero sigo siendo muy, pero muy conservador y creo que es mas factible y seguro usar globos aerostáticos, que pueden estar mas tiempo y usando menos energía, el problema mas grande creo que serian las tormentas marcianas, aunque si los globos son mas resistentes o pueden directamente anclarse al suelo y esperar que la tormenta pase,saludos Daniel, desde Bogota.
Si la tecnología de compresión de helio que usan en el dirigible de Aeroscraft se pudiera aplicar a pequeña escala. Se podría enviar un dirigible con capacidad de aterrizar cuando se requiera. Sería interesante, se tendría la capacidad de vuelos de larga duración y la de permanecer sobre un objetivo.
Ola, una buena idea que mejora la exploración a ras de suelo, pero…. en este punto traigo las palabras de un piloto que decía que el helicóptero son un montón de piezas ensambladas y que ninguna de éstas quiere volar…. Por eso, en Marte, quizá fuera más seguro un globo, aunque con menos mobilidad, claro.
Una apreciaicon y una pregunta.
Dada la baja densidad de la atmosfera, ¿como de grnade seria un dirigibe que cargara con un kilo de carga util? Perogrullo diria que seria unas 700 veces mas grande((?), no me he puesto a calcularlo, disculpen) que en Tierra. Me parece que el factor tamaño es un punto en contra.
Y la pregunta es; ¿La atmosfera marciana esta siempre en calma? No estoy seguro y no he encontrado informacion clara al respecto, pero creo que hay vientos y tormentas bastante fuertes en marte, si estoy en lo cierto, estas turbulencias podrian acabar facilmente con el minihelicoptero, y el efecto vela de un didigible «enorme» acabaria del mismo modo.
Los Yanquis investigaron — creo que alla por los 50 — los dirigibles como plataforma de vigilancia maritima, y despues de un par de desastres, uno de ellos a causa de una tormeta inesperada, abandonaron el programa.
Pero como no estoy nada seguro de lo que digo me gustaria que me lo aclarara alguien.
Sí, Marte tiene en casi toda su superficie, vientos (en ocasiones) bastante fuertes. Oppy está hasta arriba de polvo por algo, de vez en cuando el propio viento lo limpia si no va cargado de partículas, otras lo ensucia más.
Por eso yo creo que un helicóptero de apoyo sería una idea mejor que la del globo, es igual de fácil hacerlo volver (eso hoy día no es problema) y más rápido, lo cual puede ser una ventaja.
Me sumo a la duda. Según tengo entendido, en Marte hay rachas de viento que superan los 100Km/h. No sé yo si un dron podría llevar a cabo sus operaciones bajo esas condiciones.
Segun tengo entendido, debido a la poca densidad de la atmosfera, para que sintieras el aire en marte tendria que soplar a 160 km/h y seria equivalente a la brisa terrestre.
Leyendo eel foro me preguntaba lo mismo Astroboy. Saludos.
Siempre podrías anclar el helicoptero en el suelo y/o plegarle las hélices para que no le afecte el viento.
Con un dirigible no podrías controlar tan fácil a dónde va, como apoyo para el Rover no lo veo.
Fascinante. Uno de los problemas que veo yo es el tamaño de las alas en cuanto al viaje. Está claro que el peso es un tema gravitatorio, pero al ser menos densa la atomósfera ya estamos hablando, para 10-20Kg, de una envergadura considerable de alas. Por otro lado, ¿hay algún impedimento tecnológico? no lo creo, seguro que podrían ir plegadas jajaja.
Pero, si sólo tiene una cámara, ¿por qué no llevar una especie de dron como los de juguete? De nuevo, no creo que haya un impedimento tecnológico para diseñar algo bueno y barato.
Si sale bien, el mantenimiento de un bicho de estos es mínimo y yo creo que un par de viajes casi casi compensa el coste.
Ojalá saliera «palante».
Para saber más sobre el uso de dirigibles en la exploración planetaria, os recomiendo:
Airships for Planetary Exploration
http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20040191323.pdf
Martian aircraft
http://www.redcolony.com/art.php?id=0507310#Martian_Aircraft
Mars Solar-Electric Airship
http://www.swri.org/3pubs/ird2001/15-9179.htm
Y sobre distintas ideas para vehículos aéreos marcianos:
VERTICAL LIFT PLANETARY AERIAL VEHICLES: THREE PLANETARY BODIES AND FOUR CONCEPTUAL DESIGN CASES
http://halfdome.arc.nasa.gov/publications/files/Young_ERF01.pdf
A Mars VTOL Aerobot – Preliminary Design, Dynamics and Control
http://core.ac.uk/download/pdf/102536.pdf
Saludos
¿Y qué pasa con los vientos marcianos? Existen mapas de vientos cercanos a la superficie?
Me parece que el desgaste del material sería muchísimo, debido a las partículas en el aire y la alta velocidad de las palas del rotor. Además, no solo está el riesgo del aterizaje para recargar batería (aunque en este último caso entiendo que es no sería necesario), sino que cualquier aterrizaje malo, que hiciera que las palas tocaran tierra (o marte 🙂 ) darían al traste con la misión, por romperse estas, o simplemente porque si la sonda se cae de lado no podría volver a levantarse…
Yo creo que con todo esto nos olvidamos de lo fundamental.:como dirigir el globo,helicóptero,dirigible en definitiva ,el drone.Para quien no lo sepa «drone» significa en inglés «zangano» ,Nombre muy apropiado porque viene a significar que son animales o cosas que necesitan órdenes para funcionar.El problema es que de la Tierra a Marte hay un retardo en las comunicaciones de una hora(corregirme si me equívoco)y y el drone :(1-Tiene inteligencia artificial.2-Se dirige desde la superficie marciana.3-Se dirige por algún astronauta desde la superficie), se estrellaria a la menor tormenta o dificultad.En definitiva creo que pasarán mochos años antes de que vea,os un aparato de estos sobre Marte.Vosotros ¿que opinaís «espaciotrastornados»?.
No es ningún problema, el despegue, aterrizajer y maniobra automático, es algo bastante común en muchos dispositivos de vigilancia militar, no en los drones que podemos comprar en una tienda (que algunos aterrizan solos bajo ciertas circunstancias), la cuestión es meter un sistema de control así en un procesador que pueda sustentarse en ese helicóptero y que pueda resistir las condiciones Marcianas con seguridad (más darle corriente). Pero se me ocurre que simplemente necesitarías la electrónica necesaria para contactar con el rover al que daría apoyo (no hablo de misión autónoma) y que el/los procesadores de este hiciesen el trabajo.
🙂 pues a mí ésto me recuerda a AMEE y me da un poquito de «cangueli», XD
https://www.youtube.com/watch?v=8ZKITq_2ORw
¡Que grande AMEE! 🙂 🙂 Algún dia… ^^
Me gustó Red Planet amigo. Puto androide cabrón ¡ Conocéis los nuevos engendros robóticos ( o mecatrónicos,) de la Darpa o de la Usaf ? Jo, pues nada, tendremos que defendernos a lo Matrix, llevando encima un dispositivo EMP , o pulso electromagnético para dejar refrito a cualquier chip con patas o alas que se menee de manera sospechosa…
Automatizar todos esos procesos no supondría un gran problema, salvo los aterrizajes, que pueden ser un poco puñeteros dependiendo de las condiciones.
Los problemas los veo estructurales… Los helicópteros ligeros no resisten nada bien las turbulencias, los rotores contienen muchas piezas pequeñas mecánicas que, con el polvo de Marte y sin un mantenimiento adecuado… Dudo que durase mucho… Este tipo de motores requiere de mucha energía.
El dirigible sin embargo es muy estable y resistente a turbulencias, el pequeño motor no sufriría tanto la erosión y podría alimentarse de energía solar y funcionar por periodos mucho más largos de 3minutos/dia, puede que continuamente.
Yo apostaría a que el helicóptero sería más pesado que un dirigible y más dificil de automatizar. Aterrizar 20 veces seguidas sin incidentes en diferentes condiciones… je, habría que verlo 🙂
El problema es que un dirigible no puede aterrizar, que es es supongo la intención del Drone, llevar menos instrumentos que un rover pero aumentar la movilidad. Un dirigible tendría que estar siempre por encima de accidentes geográficos, cualquier racha de viento o perdida brusca de altitud y se acabó la misión. No es cuestión de elegir uno u otro porque son dos nichos distintos.
El dirigible tendría sentido compararlo con una avión , pues ambos si tocan el suelo están bastante jodidos. El drone competiría con el rover, ambos investigarían el suelo pues el drone estaría mas tiempo en tierra que en el aire por su autonomía .
Bueno, desde el punto de vista de que flota, no le veo mucho el sentido a tener que aterrizarlo(dirigible), recordemos que este heli llevará poco más que una cámara y sólo servirá para buscar objetivos para el rover, no podrá estudiar rocas al aterrizar por si mismo.
Un dirigible con una trayectoría circular alrededor del rover sería mucho más efectivo en esta tarea, creo yo.
No es comparable a un avión ya que no requiere de una gran velocidad para volar y maniobrar ni de la misma energía.
Admito que no tengo muy claro lo grande que debería ser el «globo» para poder flotar en la tenue atmósfera.
¿Y qué decís de nuestro amigo el platillo volante hinchable? Se podría aplicar su tecnología no sólo para llegar allí, sino para utilizar helio como manera de «trasladarlo» de sitio?
http://www.space.com/26778-nasa-flying-saucer-parachute-supersonic-video.html
http://ciencia.nasa.gov/ciencias-especiales/26jun_flyingsaucer/
Me temo que no, su cometido hacer de escudo de frenado, y para que pueda volar tendría que ser muy liviano, cosa que no creo que cumpla este «platillo» con las capas de kevlar y otros materiales para aguantar las altas presiones y el material ablativo que debe recubrirlo todo.
El símil seria pensar en un balón de baloncesto lleno de aire en la Tierra… no, no todo es meterle aire y a volar …
Comprendido. Ya me extrañaba a mí que ninguno de los espacio-trastornados «top» no hubiera comentado el asunto.
Muchas gracias por tu respuesta y tu aclaración.
Creo que es un modelo arriesgado pero de funcionar, abriría un abanico nuevo en la exploración, serian los ojos avanzados de un rover.
Un rover se desplegaría en una zona y antes de moverse los drones habrán cartografiado toda la superficie circundante dando a los científicos las pistas necesarias para dirigir al rover, que es el que poseerá el equipamiento científico mas pesado y preciso. Incluso si el rover tiene una esperanza de vida grande (como el Opportunity) podrá recibir la visita de nuevos drones enviados en futuras misiones (con nuevos instrumentos).
Me parece una idea muy buena. De entre las tres posibilidades: avión, dirigible o helicóptero, este último me parece el concepto más eficiente para la exploración de la superficie marciana.
Me preguntaba lo mismo que Joaquín (más arriba). A no ser que sea totalmente automatizado el vuelo, y siempre sea el mismo. Si, tal y como dice Joaquín, la señal tarda en llegar una hora, como se encuentre un peñasco a 15 minutos de camino y no lo hayan visto con una hora de antelación para corregir la dirección, se chafa. O lo he entendido mal, o no lo entiendo. Además, no entiendo lo de los 2 ó 3 minutos. Si ése es el tiempo de vuelo que tiene, nada más salir tiene que tirar pa tras. Así, no le veo beneficio a mandarlo. Si pudiera durar su vuelo un par de horas al día y no tuviera que volver a la base a recargar, sino que se recargara sólo, aunque tuviera que estar un par de días de carga parado. Entonces si. Y habría que romperse los cuernos muchísimo con el sistema de aterrizaje, porque si al caer coje una piedra grande en una pata (tipo Philae), y se vira, adios. Un saludo.
Eso comento por ahí Agüi, no me gustaría ser el responsable de que esa cosa aterrice «varias veces» jejeje.
Lo de los 3minutos viene porque hay que ponerle un motor y unas hélices enormes para que pueda volar, y se come toda la batería en un momento, ya que es un motor potente que requiere muchas RPM para lograr sustentación.
Si le pones una batería más grande para que el tiempo de vuelo aumente, tienes que aumentar la potencia del motor, con lo cual…
Su función sería dar un «saltito», hacer 3 fotos, aterrizar…
En el momento en que una hélice roce el suelo o se meta polvo en la mécanica del motor(qué pasará, ya que levantará un montón al aterrizar), olvídate del trasto.
Su «función» debería hacerla de manera completamente autónoma, las comunicaciones directas en ese lapso de tiempo son imposibles.
La automatización en sí no sería dificil, pero sí realizar maniobras para corregir el lugar de aterrizaje, dada su limitada autonomía de vuelo.
¿Y el entrenamiento aquí en la Tierra?. ¿Cómo se harían las pruebas con las condiciones que se encontrarían en la atmósfera y la menor gravedad de Marte?. ¿Se pueden simular aquí esas condiciones para probarlo?, o ¿vamos para allá con simulaciones por ordenador?. Un saludo.
Pienso que se podrían simular las condiciones de presión atmosférica de Marte dentro de una cámara de vacío.
Como hemos aprendido con Curiosity, no se pueden realizar todo tipo de pruebas por la diferencia de gravedad, algo que no se puede simular como se simulan las condiciones de la atmósfera en un tunel de viento.
El sistema de aterrizaje de Curiosity jamás se probó aquí, sólo partes aisladas(No se le dejó caer en nuestra atmósfera).
Mucha parte de la ingenieria parte de aquí con simulaciones teóricas e informáticas.
Ya existe software de vuelo para evitar obstáculos. No hay problema con eso.
La idea es apoyar al rover, no ir a su bola. Viendo la velocidad a la que se mueven los rover basta un vuelo corto alrededor del mismo para cartografíar la zona cercana a donde va el rover. Tu le puedes decir desde la Tierra, a tal hora vete al punto A, luego al B, luego al C, cartografía todo y aterriza en el punto D.
No existe problemas de software para hacer eso.
El único problema sería de hardware y desconozco hasta que punto es así… Para que sea autónomo hace falta bastante procesador, cámaras y sensores para orientarse y «ver», etc. Todo consecuentemente apantallado para la superficie de Marte.
No se en qué punto está la miniaturización de todo eso y lo que pesaría para soportar las condiciones de marte. Desconzco si es factible para el peso que podría llevar este drone.
La idea es que sea un drone, o sea, que funcione de forma autónoma, si no, no tendría sentido. No es lo mismo un rover que se va moviendo unos centimetros cada minuto, que sí se puede dirigir desde Tierra, que un dispositivo que vuela y se mueve más deprisa y requiere de un tiempo de reacción muy corto.
Ahora mismo los helicópteros de aeromodelismo están muy desarrollados, ya sean de un rotor, doble rotor o cuadricópteros. No solo los drones que se emplean en el ejército o en aplicaciones profesionales, incluso los modelos para aficionados son muy sofisticados. Generalmente se manejan con un mando a distancia o desde un teléfono móvil más que nada para que el usuario se recree moviéndolos a su antojo, pero no costaría demasiado hacer que volasen autónomamente con una serie de sensores de obstáculos, de distancia y gps. Y solo estoy hablando de los drones para constructores amateur. No me quiero ni imaginar que se podría hacer en el JPL.
Ningún helicóptero terrestre funcionaría en Marte.
Si estás familiarizado con el RadioControl notarás la diferencia de proporciones entre el rotor, las hélices y el cuerpo. Prácticamente es un motor volante. Esto deja muy poco margen para la batería y demás instrumentos.
Si quieres un aterrizaje razonablemente seguro, en condiciones geológicas indefinidas, necesitas un sistema de radar y esto pesa…
Tampoco lleva rotor trasero, las maniobras giroscópicas no le otorgarán demasiada precisión.
En este caso supongo que se podría construir una aeronave mixta. Un cuerpo de dirigible que aporte una parte de la sustentación y unos rotores que se emplearían para la fase de vuelo.
Excelente apreciación… Patricio 😉
y UN HIBRIDO DRONE-PLATILLO: SUSTENTADOR E IMPULSORES
No sé si sabréis que existen pilas nucleares desde hace mucho tiempo, como los Radioisotope Thermoelectric Generators, que podrían proporcionar años de energía al dron
Hecho!
https://mars.nasa.gov/multimedia/videos/movies/PIA24595/PIA24595-1280.mp4