

Ayer día 24 de febrero, a las 16:06 UTC, el vehículo de carga automático europeo ATV-2 Johannes Kepler se acopló con el puerto trasero del módulo ruso Zvezdá de la ISS. En ese momento se cerraron los ganchos del ATV-2 para fijarlo a la ISS. Dos minutos más tarde se activaron los ganchos de la ISS y a las 16:19 UTC se efectuaron las conexiones eléctricas. A las 16:35 UTC comenzaron las conexiones de datos entre los vehículos.



El ATV-2 se acerca a la ISS (ESA/Paolo Nespoli).
El ATV-2 se aproximó a la ISS por detrás con respecto a la dirección de avance orbital del complejo (V-bar) usando sensores estelares y un sistema GPS. Cuando se encontraba a 30 km de la estación, el ATV-2 se detuvo para recibir los datos de GPS de la ISS y compararlos con los suyos, permitiendo calcular la trayectoria final de aproximación. En los 250 metros finales, el ATV-2 se guía mediante las señales de radio del sistema ruso de acoplamiento automático Kurs y un sistema europeo de navegación óptico consistente en un videómetro que calcula distancias y velocidades gracias a dos haces de luz láser. La precisión del método óptico es de 8 cm, superior a los 34 cm del sistema Kurs. El sistema de acoplamiento del ATV-2 ha sido fabricado en Rusia por RKK Energía y es similar al empleado por las naves Soyuz y Progress.

Maniobra de acercamiento a la ISS (ESA).

Fase final de aproximación del ATV-2 desde la cámara del Zvezdá (ESA).

Paolo Nespoli y Alexándr Kaleri supervisaron el acoplamiento (ESA).
El ATV-2 Johannes Kepler es un vehículo de carga automático propiedad de la Agencia Espacial Europea (ESA). Ha sido construido por EADS Astrium y sus dimensiones son de 9,794 x 4,480 metros, con una envergadura de 22,281 metros una vez desplegados los paneles solares. Tiene una masa al lanzamiento de 20,75 toneladas, de las cuales 13,083 toneladas corresponden a la estructura del vehículo y 7085 kg son carga útil. La nave se halla dividida en dos partes: la sección delantera presurizada con la carga y el sistema de atraque (ICC, Integrated Cargo Carrier), y el módulo de servicio con la aviónica y los sistemas eléctricos y de propulsión (PM, Propulsion Module). El PM incluye cuatro motores principales de 490 N de empuje y 28 motores para control de actitud de 220 N cada uno. Cuatro paneles solares situados en el PM proporcionan unos 3800 W de potencia eléctrica.
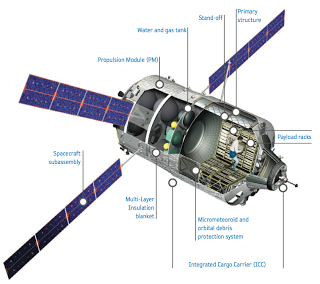
ATV-2 (ESA).
Con esta fiabilidad, en cuatro días le ponen una capsulita de reentrada y ya tenemos acceso humano europeo al espacio (que ya nos vale).
Hola Daniel, me es interesante la parte de tu nota donde indicas que entre el sistema automático Kurs y el sistema europeo de navegación óptico el segundo tiene una mejor precisión que el primero, tienes un post comparativo para entender el funcionamiento de los dos ?
Por cierto, el sistema de guiado del ATV se ha desarrollado en España, en la empresa CRISA, en Tres Cantos.
@Anónimo: no tengo un post sobre el tema, pero lo tendré.
@Miguel: sí, es verdad.
Saludos.
Hola Daniel, una consulta.
Qué sabes respecto a la posibilidad de usar el módulo de propulsión del ATV o del Cygnus para llevar nuevos módulos a la ISS.
Respecto a lo mismo, qué sabes del proyecto ARDV (Autonomous Rendezvous & Docking Vehicle) de la NASA?
Saludos, y como siempre gracias por tu blog.
Desde el lanzamiento hasta la aproximación con la ISS(no acoplamiento). Se realiza automáticamente o hay alguna intervención?.
Es todo automático, aunque el control de tierra lo supervisa todo y actualiza el software con los parámetros orbitales.
Saludos.