

Mientras la nave más compleja construida por la Humanidad se dirige hacia el planeta rojo, este mes celebramos cuarenta años del primer aterrizaje en Marte. Un aniversario hoy casi olvidado que sin embargo nos recuerda un hecho importante y es que nuestra especie ya lleva nada más y nada menos que cuatro décadas explorando la superficie de Marte.

El 2 de diciembre de 1971, la sonda soviética Mars 3 se convirtió en el primer artefacto humano que alcanzaba la superficie del planeta rojo. La ventana de lanzamiento a Marte de 1971 era una magnífica oportunidad para que la Unión Soviética reanudase su programa de exploración marciano. La URSS había perdido la carrera lunar y el gobierno estaba deseando llevar a cabo algún tipo de victoria que devolviese la gloria al otrora invencible programa espacial soviético. Durante la ventana de lanzamiento de 1969 se habían lanzado dos sondas a Marte, pero desgraciadamente se perdieron por culpa de sendos fallos del inmaduro cohete Protón-K. Aunque no se sabría hasta después de la caída de la Unión Soviética, estas naves pertenecían a una nueva generación de vehículos construidos por la oficina de diseño NPO Lávochkin, dirigida por Georgi Babakin.
Hasta mediados de los años 60, la URSS había usado un mismo tipo de nave para explorar Venus y Marte. Denominadas series 2MV y 3MV («M» por Marte y «V» por Venus), estas rudimentarias naves habían sido desarrollado originalmente por la OKB-1 de Serguéi Koroliov y habían logrado su cuota de éxitos propagandísticos, pero eran demasiado simples para llevar a cabo una misión de exploración en profundidad. La limitación principal de la serie 3MV era su masa (inferior a 1000 kg), ya que dependían del cohete Mólniya (básicamente un misil R-7 modificado) para poner rumbo a Marte. NPO Lávochkin se propuso entonces desarrollar una nueva generación de sondas más grande y compleja que deberían usar el nuevo y potente lanzador Protón-K (8K82K), creado por la oficina de diseño OKB-52 del ambicioso Vladímir Cheloméi. El Protón-K era una bestia completamente diferente, capaz de poner en órbita baja el doble de masa que el Mólniya.
Como resultado, se decidió no lanzar ninguna sonda a Marte durante la ventana de lanzamiento de 1967 para ganar tiempo y completar así el diseño de la nueva serie. El primer cambio introducido fue el vehículo de descenso a la superficie. Las sondas 3MV habían usado una cápsula preparada para una atmósfera con una presión de 80-300 milibares, pero la sonda norteamericana Mariner 4 había descubierto en 1965 que la presión de la atmósfera marciana no superaba los 10 milibares. Evidentemente, las cápsulas de la serie 3MV no habían tenido ninguna posibilidad y se imponía un rediseño completo.
Las nuevas sondas, denominadas apropiadamente como M-69 o 2M, deberían ponerse en órbita marciana y colocar en la superficie un vehículo de aterrizaje basado en el diseño de las sondas lunares Ye-6M, todo un desafío para el programa espacial soviético, que hasta el momento había encadenado seis fracasos en su incipiente programa de exploración de Marte. El orbitador recibiría la designación OO (Orbitalni Otsek, «compartimento orbital») y la sonda de aterrizaje sería conocida como SA (Spuskaemi Apparat, «aparto de descenso»). El diseño preliminar de las M-69 usaba la etapa de descenso de las sondas lunares Ye-5 (Lunojod) y Ye-5-8 (recogida de muestras), pero en vista de las complicaciones técnicas a la hora de adaptar esta tecnología para una misión a Marte, el equipo de Babakin decidió prescindir de esta configuración cuando quedaban tan solo 13 meses para el lanzamiento.

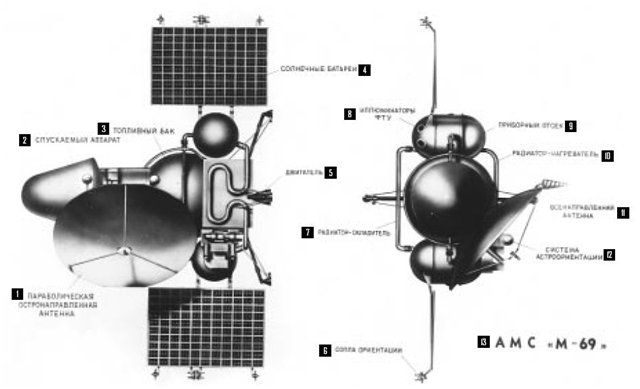


Con 4850 kg de masa al despegue, el nuevo diseño era mucho más grande que las naves de la serie 3MV y emplearía un tanque esférico central como estructura principal. Los delicados equipos electrónicos estarían cobijados en una sección presurizada. El vehículo de aterrizaje, de 260 kg, estaría situado en la parte superior, protegido por un puntiagudo escudo térmico con un ángulo inusitadamente pequeño. La sonda utilizaría dos paneles solares de 3,5 metros cuadrados para recargar una batería de níquel-cadmio que generaba una corriente de 12 amperios, así como una antena parabólica de 2,8 metros de diámetro para comunicarse con la Tierra. Como novedad, un avanzado sistema de control de datos -avanzado para los estándares soviéticos de la época, se entiende- de tan sólo 11 kg de masa controlaría los sistemas de a bordo, incluyendo un nuevo sistema de control a reacción con ocho pequeños impulsores a base de nitrógeno y ocho sensores de posición (dos sensores solares, dos estelares, dos terrestres y dos marcianos). Las tres cámaras usarían un sistema de escaneado facsímil basado en la tecnología empleada en otras sondas lunares. Cada cámara incorporaba un sistema de tres filtros para realizar imágenes a color de 1024 x 1024 píxels. La distancia focal de las cámaras era de 35 mm, 50 mm y 250 mm respectivamente, lo que permitiría alcanzar una resolución máxima de 200-500 metros con un campo de 100 km x 100 km. Las cámaras tenían suficiente película como para realizar 169 imágenes cada una.
La serie M-69 era la primera sonda marciana creada totalmente desde cero por NPO Lávochkin y supuso la verdadera prueba de fuego para el equipo de Babakin, que hasta entonces se había limitado a mejorar las creaciones de la OKB-1 de Koroliov. No obstante, debido a la complejidad de la nueva sonda, Babakin decidió eliminar las sondas de aterrizaje para la ventana de lanzamiento de 1969. De hecho, el diseño preciso de estas sondas sigue formando parte de los numerosos misterios de la historia de la cosmonáutica.
Lamentablemente, las sondas M-69 nunca lograron su objetivo. La M-69A (M-69 nº 521) fue lanzada el 27 de marzo de 1969, pero se perdería minutos después al explotar la tercera etapa del Protón-K por culpa de una turbobomba defectuosa. Su gemela M-69B (M-69 nº 522) ni siquiera llegó tan lejos. Resultaria destruida el 2 de abril de 1969 al fallar uno de los seis motores de la primera etapa del Protón-K. El lanzador se elevaría hasta un kilómetro de altura y se estrellaría a tres kilómetros de la rampa, incinerando a la pobre M-69B en una bola de fuego resultado de la combustión de varios cientos de toneladas de combustibles hipergólicos.
Lo más curioso de toda esta historia es que nadie fuera de la URSS se enteró de la debacle de las M-69. Puesto que ni siquiera alcanzaron la órbita terrestre, los analistas occidentales fueron incapaces de averiguar la verdadera naturaleza de los dos lanzamientos fallidos de los Protón. Cuando posteriormente se supo que la Unión Soviética había intentado lanzar dos sondas marcianas en 1969, los expertos supusieron automáticamente que habían sido similares a la posterior serie M-71. Pero no fue así. Las M-69 fueron una serie totalmente única y novedosa que servirían de base para el resto de misiones planetarias de la URSS y cuyos detalles sólo serían conocidos hasta bien entrados los años 90.
Aunque el fracaso de las M-69 fue un duro golpe para NPO Lávochkin, la oficina de diseño se concentró ahora en la ventana de lanzamiento de 1971. Para ese mismo año, los Estados Unidos planeaban lanzar las ambiciosas misiones Mariner 8 y Mariner 9, destinadas a estudiar la superficie marciana desde la órbita con una precisión sin precedentes. La URSS no podía quedarse atrás, pero había un problema. Los ingenieros de Lávochkin carecían de las efémerides orbitales necesarias para llevar a cabo una misión de aterrizaje. Babakin y su equipo habían esperado poder usar los datos de las M-69 para refinar los cálculos orbitales, pero desgraciadamente ya sabemos cómo terminaron estas sondas. Otra opción era usar los datos obtenidos en 1965 y 1969 por las sondas norteamericanas Mariner 4, 6 y 7, pero desgraciadamente -y a diferencia de los datos de presión atmosférica-, estas efemérides no habían sido publicadas en la prensa especializada. Por otro lado, dado el clima de confrontación de la Guerra Fría, llevar a cabo una petición formal a la NASA para consultar las codiciadas efemérides marcianas quedaba fuera de toda discusión, aunque durante unos meses se estudió la posibilidad de intercambiar los datos de Marte por las efemérides de Venus obtenidas por las sondas soviéticas. Se barajó retrasar la misión de aterrizaje a 1973, pero la ventana de lanzamiento para este año era incluso peor que la de 1971. Además, Babakin y el gobierno no estaban dispuestos a esperar.
NPO Lávochkin optó entonces por una ingeniosa solución a este problema. Se lanzarían tres sondas en la ventana de lanzamiento de 1971 y no dos como estaba previsto. La primera sería un orbitador (M-71S, «S» por sputnik, «satélite») encargado de recopilar las efemérides orbitales precisas del planeta rojo. Esta nave estaría equipada además con varios radiofaros para guiar el descenso y aterrizaje en Marte de dos sondas posteriores, que viajarían junto a sendas M-71P («P» de posadka, «aterrizaje»). De esta forma, no sería necesario tener disponibles las coordenadas orbitales precisas para 1971, ya que se obtendrían sobre la marcha. Como «plan B», las M-71P irían equipadas con un complejo sistema de navegación autónomo.
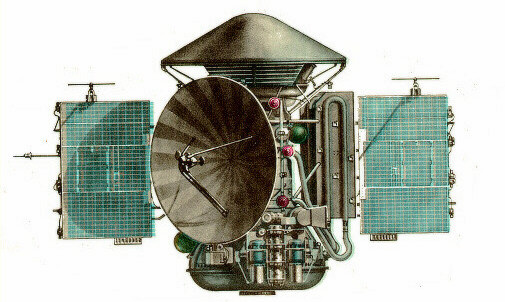
Para esta ambiciosa misión, los ingenieros de NPO Lávochkin decidieron abandonar parcialmente el diseño de las M-69 y crear una nueva serie de vehículos. Con la sonda de aterrizaje, cada M-71P tendría una masa total de 4650 kg y unas dimensiones de 4,1 x 2 metros, alcanzando una envergadura de 5,9 metros con los paneles solares desplegados. La masa del orbitador era de 3440 kg (2265 kg sin combustible) y la de la sonda de aterrizaje alcanzaba los 1260 kg con el motor de corrección, los paracaídas, los motores de frenado de combustible sólido y el escudo térmico, incluyendo el aterrizador propiamente dicho de 358 kg. En vez del tanque de combustible de forma esférica, las M-71 dispondrían de un cuerpo cilíndrico de tres metros con los depósitos de combustible y el sistema de propulsión KTDU-425A. Una estructura toroidal presurizada incorporaba los sistemas electrónicos. Las sondas M-71 deberían llevar más combustible que las M-69, ya que la ventana de lanzamiento de 1971 no era tan favorable como la de 1969. La sonda tenía dos paneles solares de 2,3 x 1,4 metros y un sistema de orientación y control muy parecido a las naves M-69. La antena parabólica de 2,5 metros serviría también para retransmitir a la Tierra desde la órbita los datos de las sondas de aterrizaje, que entrarían en la atmósfera marciana de forma directa. Las M-71 disponían de un magnetómetro, tres fotómetros, dos radiómetros, un espectrómetro, un sensor de rayos cósmicos y dos cámaras de televisión que sustituirían al engorroso sistema de escaneado de las M-69. La cámara Vega tenía una distancia focal de 52 mm, mientras que la Zufar contaba con un teleobjetivo de 350 mm. La máxima resolución espacial sería del orden de 10-100 metros.




Pero aterrizar en Marte no es fácil. A diferencia de otros mundos, para alcanzar la superficie del planeta rojo es necesario usar una combinación de escudos térmicos, paracaídas y motores cohete. Después de analizar en profundidad el diseño de la sonda M-69, los ingenieros de NPO Lávochkin llegaron a la conclusión de que esta forma era ineficiente, así que optaron por un escudo térmico de 3,2 metros de diámetro con un ángulo de 120º. Dentro del escudo térmico se encontraba el aterrizador de forma ovalada, cubierto en la parte superior por el contenedor del paracaídas de forma toroidal y un pequeño motor de combustible sólido.
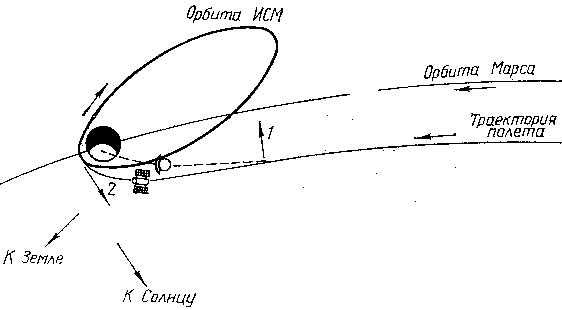
Las naves nodrizas de las primeras sondas Venera se habían quemado en la atmósfera después de soltar las sondas de aterrizaje, pero los orbitadores de las M-71 debían situarse en órbita de Marte. Para garantizar el éxito de la misión y en vista de la falta de efemérides marcianas precisas, las M-71 debían realizar una maniobra automática con una Delta-V de unos 100 m/s para corregir su trayectoria a 70000 km de distancia Marte usando sistemas de navegación óptica. Si esta maniobra fallaba, la nave debía usar los datos de la M-71S. En caso contrario, la misión habría estado condenada al fracaso. Una vez situada en una trayectoria correcta, la sonda de aterrizaje se separaría cuatro o seis horas antes del aterrizaje a 46000 km de distancia. Un cuarto de hora después, la sonda de aterrizaje encendería su motor para realizar otra maniobra con una Delta-V de 120 m/s y situarse así en la trayectoria de entrada correcta, con un error en el ángulo de ataque no mayor de 5º. El motor de combustible sólido se separaría una vez finalizada su tarea. Por su parte, el orbitador realizaría una última sesión de navegación óptica a 20000 km de Marte para refinar el momento del encendido del motor principal con el fin de situarse en órbita. El encendido orbital requeriría una Delta-V de 1190 m/s. Todas estas maniobras se llevarían a cabo de forma totalmente automática.

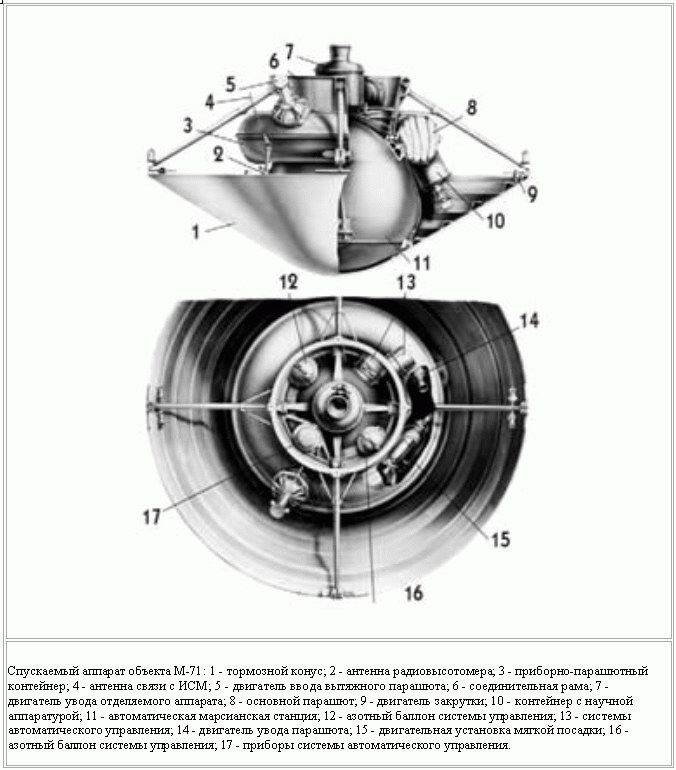






Tras la separación del orbitador, la sonda estaría controlada en los tres ejes mediante un sistema de propulsores de nitrógeno, pero unos pequeños cohetes de combustible sólido de 0,5 kN de empuje se activarían antes de la entrada atmosférica con el fin de hacer rotar a la sonda alrededor de su eje y dotar así de estabilidad al vehículo. La sonda entraría a 5,8 km/s, alcanzando una deceleración máxima de 2 G. Poco antes del despliegue del paracaídas, se detendría esta rotación mediante otro conjunto de cohetes. Ante la incertidumbre de los datos atmosféricos, el paracaídas debía desplegarse en una fase relativamente temprana -aproximadamente 100 segundos después del inicio de la entrada- para dar suficientemente tiempo a frenar el vehículo. El despliegue tendría lugar a una velocidad de Mach 3,5, un desafío impresionante para la tecnología de la época. Para garantizar el éxito de esta maniobra, se realizaron ensayos del sistema de paracaídas en la alta atmósfera usando globos situados a 35 km de altura y cohetes suborbitales que alcanzaron los 130 km de altura.
Para evitar la ruptura del paracaídas principal de 140 metros cuadrados de superficie, se decidió incorporar un paracaídas piloto de 13 metros cuadrados encargado de estabilizar y frenar la sonda. 3,1 segundos después de abrirse el paracaídas debían activarse los instrumentos científicos, cuya vida útil estaba limitada por la duración de las baterías. 12,1 segundos después del despliegue del paracaídas, la sonda debía moverse ya a una velocidad subsónica, lo que permitía el despliegue total del paracaídas, que hasta ese momento no se había abierto por completo. Dos segundos después de la apertura total se desprendería el escudo térmico. Cinco segundos después de la separación del escudo la velocidad de descenso se habría reducido hasta los 235 km/h, momento en el cual debía entrar en funcionamiento el radar Doppler, un elemento crítico para determinar la altura precisa del vehículo. En las líneas del paracaídas se instalaron cohetes de combustible sólido que serían los encargados de frenar el descenso antes de liberar al vehículo de aterrizaje a 16-30 metros sobre el suelo, un sistema muy parecido al empleado por la sonda norteamericana Mars Pathfinder en 1997. Para evitar que los motores dañasen la sonda, las líneas del paracaídas se alargaban 25 segundos después del despliegue de los mismos. Dos segundos después, se activaría el radar de baja altitud. En el momento del encendido de los cohetes de combustible sólido, las líneas superiores del paracaídas se cortarían y un segundo cohete de 9 kN de empuje se encargaría de alejar el paracaídas de la zona de aterrizaje. El motor principal entraría en acción desarrollando 56 kN durante 1,1 segundos, momento en el cual se separaría para permitir la caída libre del aterrizador. Con el fin de evitar que el cohete de combustible sólido cayese sobre la sonda, un cohete horizontal de 1 kN se encendería durante cuatro segundos para desviar la trayectoria de caída.


El que debía convertirse en el primer artefacto humano en suelo marciano presentaba forma ovoidal con 1,2 metros de diámetro y estaba basado en el diseño de las sondas lunares Ye-6M, con cuatro «pétalos» que se abrirían una vez en la superficie. De esta forma se podía situar la sonda verticalmente independientemente de la posición alcanzada tras el contacto con el suelo. Eso sí, se decidió no incluir el pesado sistema de aterrizaje con airbags de sus primas lunares y se dotó a cada cápsula de una capa de espuma de 20 cm de espesor que amortiguaría el impacto final con el suelo marciano a 43,2 km/h. La capa de espuma estaba dividida en dos partes, una situada en la sección inferior que permanecería unida a la sonda y otra que cubría los pétalos y que se separaría poco después del aterrizaje mediante el inflado de un pequeño globo. Cada aterrizador tenía una masa de 358 kg y había sido diseñado para soportar impactos con una aceleración máxima de 180 G. Con el fin de impedir la contaminación de Marte por microorganismos terrestres, los vehículos de aterrizaje fueron esterilizados antes del lanzamiento. Entre los ocho instrumentos científicos de la sonda se encontraban dos cámaras (realmente telefotómetros) y el pequeño vehículo PrOP-M (ПрОП-М, Прибор Оценки Проходимости – Марс) de 4 kg.


Como vemos, las misiones M-71 distaban de ser sencillas. De hecho, se trataba de un plan excesivamente ambicioso teniendo en cuenta el tiempo y el presupuesto asignado por el gobierno soviético. El primer eslabón de la misión, el orbitador M-71S (M-71 nº 170) logró alcanzar la órbita terrestre el 10 de mayo de 1970 a bordo de un Protón-K. Desgraciadamente, la etapa Blok-D de la oficina de diseño de Koroliov no logró realizar el segundo encendido para poner rumbo a Marte. La nave quedaría varada en órbita baja y sería bautizada por las autoridades soviéticas como Kosmos-419. Como resultado de este fracaso, las misiones M-71P carecerían de la ayuda adicional de la navegación por radio para alcanzar la superficie marciana y tendrían que usar su propio sistema de navegación óptica.
El 19 de mayo de 1971 sería lanzada la primera M-71P (M-71 nº 171). Esta vez el Protón funcionó como debía y la nave se dirigió a Marte sin problemas, ahora bautizada oficialmente como Mars-2, realizando la primera maniobra de corrección el 5 de junio. Sin embargo, el transmisor de radio decimétrico falló el 25 de junio (curiosamente, al mismo tiempo que en la Mars-3), seguido poco después por el transmisor secundario. Por si fuera poco, el transmisor centimétrico no pudo activarse. El 21 de noviembre la sonda realizó la segunda maniobra de corrección automática mediante su sistema de navegación autónomo, pero la tercera maniobra fue muy poco precisa. A resultas de la poca exactitud en la trayectoria, la sonda de aterrizaje entró en la atmósfera marciana con un ángulo inadecuado. El vehículo se estrellaría con el suelo el 27 de noviembre antes de poder abrir los parcaídas (en la región 44,2º sur, 313,2 oeste). Por lo menos se convirtió en el primer objeto humano en alcanzar la superficie marciana, desperdigando en el impacto varias insignias soviéticas. Por su parte, el orbitador se colocaría con éxito en una órbita de 1380 x 24940 km con una inclinación de 48,9º. Funcionaría hasta el 22 de agosto de 1972.
La Mars-3 (M-71P nº 172) fue lanzada con éxito el 28 de mayo de 1971. El 2 de diciembre la sonda de aterrizaje se separó 4 horas y media antes de la antrada, alcanzando la atmósfera marciana a 5,7 km/s y con un ángulo inferior a los 10º. Tras efectuar correctamente la compleja secuencia de eventos del descenso, la Mars-3 se posaría en la superficie marciana (44,9º sur, 158,0º oeste) a las 13:50:35 UTC del 2 de diciembre de 1971 en medio de una fuerte tormenta de polvo. La Humanidad había logrado situar un objeto con éxito sobre el planeta rojo. Lamentablemente, la sonda solamente fue capaz de transmitir datos durante 20 segundos, incluyendo una imagen parcial que bien podría ser la primera fotografía de la superficie marciana, aunque para otros es simplemente ruido. El orbitador de la Mars-3 seguiría transmitiendo datos hasta agosto de 1972 situado en una órbita fuertemente excéntrica de 1530 x 190000 km y 49º de inclinación. La alta excentricidad orbital fue debida a la escasa duración del encendido del motor principal.
La Mars-3 tuvo una vida muy corta, pero intensa. Demostró que era posible alcanzar la superficie de otro planeta, un logro increíble para la época. La experiencia de las misiones M-71 sería utilizada posteriormente por NPO Lávochkin en las exitosas misiones Venera y Vega de los años 70 y 80. Sin embargo, Marte se resistió a los esfuerzos soviéticos de exploración. El planeta rojo se le atragantaría a la URSS, incapaz de hacer aterrizar ninguna otra sonda con éxito. Pero lo importante es que hace cuarenta años nuestra especie alcanzó la superficie de Marte, una hazaña que merece la pena ser recordada y valorada por todos.
Referencias:
- The difficult road to Mars, V. G. Perminov (NASA Monographs in Aerospace History, 1999).
- Stranitsi Istorii (Novosti Kosmonavtiki, nº 20, 1996).
- NPO Lavochkin.
- Soviet Mars Images, Don P. Mitchell.
El post muy bien, pero… ¿cuarenta años son medio siglo?
Perdón, corregido 😉 JAJA
Sublime post, Dani.
Espectacular.
Como siempre buena y detallada informacion.
Y casualmente muy a tiempo, porque he estado abogando para incluir varias misiones Mars sovieticas para el simulador Orbiter, porque ya esta la serie Mariner completa.
Me emocioné.
Da gusto leer tu blog, todas las entradas están muy bien explicadas hasta el mínimo detalle. Gracias.
«El 2 de diciembre de 1971, la sonda soviética Mars 3 se convirtió en el primer artefacto humano que alcanzaba la superficie de otro planeta.» – Daniel, Veneras ya habian alcanzado la superficie de Venus unos anos antes. Ademas, la Luna és tambien un Mundo, y Luna 1 Mechta ya lo alcanzado en 1959!
Cierto, estoy con Junior, quiero recordar que la Venera 3 se dió el «cascamazo» en Venus en 1966, siendo por lo tanto el primer cacharro en alcanzar otro planeta (no satélite) y que la Venera 7 «avenusizó» en 1970 siendo el primero que lo hizo de forma controlaza, sin «cascamizarse». 🙂
Sí, es verdad. Utilicé otro mundo cuando debería haber empleado planeta rojo o Marte. Corregido.
Que lástima que se perdiese en el aterrizaje, pero eso no le quita el ser la primara sonda.
Esto fue 2 días antes de que yo naciese. Mañana cumplo años y estreno decenas ufff ¿es cierto lo de la crisis de los cuarenta?
Una vez más, excelente entrada Daniel.
Daniel que opinas, en un libro de sondas soviéticas de la editorial Springer,que tengo argumenta el autor que el gran fracaso en las sondas soviéticas se debían a su diseño presurizado debido a que utilizaban válvulas de vacío o termoiónica, en lugar de electrónica de estado solido mejor dicho CI de silicio.Según el autor por esto los soviéticos nunca se aventuraron a la exploración del sistema solar exterior debido a su poca expectativa de vida.
Daniel, te has salido con esta entrada, mi mas sincera enhorabuena.
Wow si el aterrizaje de Curiosity me impresiona, este me ah dejado petrificado, me pregunto si es el aterrizaje mas complejo alguna vez realizado. Es verdaderamente increible lo que los rusos pudieron hacer en solo unos pocos años, con poca experiencia, pocos datos y poco dinero, me pregunto (como todos) que habria pasado si ellos hubieran tenido mas dinero, o que habria pasado si los norteamericanos hubieran seguido con ese entusiasmo, ese apoyo politico y publico… seguramente ahorita no estariamos planeando un aterrizaje tripulado en Marte, si no uno en Titan.
Ahora Rusia tiene que aprovechar la oportunidad que Europa Y EUA le brindan al meterlo en el ExoMars, agarrar experiencia, tomar nuevas tecnologias, para asi en los ’20s pueda volver en solitario a intentar ya posarse en la superficie Marte propiaente dicho con una o varias misiones ambiciosas e igual de complejas.
Daniel Camacho
Hola Daniel, exelente entrada.
Una duda, explicas que en las sondas m69 «las cámaras tenían suficiente película como para realizar 169 imágenes cada una.»
Como pensaban mendar la informacion a la tierra, era pelicula fotografica y la enviaban a la tierra con capsula de retorno o es que tenian otro tipo de almacenaje y enviaban la informacion via radio?
@Fede: las imágenes las escaneaban dentro de la nave y las retransmitían vía radio, un sistema empleado por los satélites espías y sondas lunare soviéticas. Las M-71 ya disponían de un sistema de TV.
Saludos.
dices…»eran demasiado simples para llevar a cabo una misión de exploración en profundidad. La limitación principal de la serie 3MV era su masa (inferior a 1000 kg) «… el transfondo es el estado primitivo de la eletrónica en la URSS, por obra y gracia de Stalin y otros. La NASA usaba como lanzadores el Atlas_Agena y Atlas Centauro con capacidad de 1000 kg (este último,el anterior menos todavia )y las Mariner a Venus , Mercurio y Marte y Pioneer a Jupiter ofrecieron éxitos incuestionables. En realidad la NASA solo utilizó , en aquella época,portadores potentes (Titan3-Centauro ) para las VIKING y las VOYAGER y recientemente incluso el modesto Delta-2 es responsable de grandes hazañas en Marte, asteroides y cometas.
El lastre que tiene Rusia en esta tecnologia le supuso en otra época ir siempre a la zaga y hoy dia aun le queda mucho por hacer.
Maravillosa entrada. es cierto que poca gente se acuerda de esta sonda. en estos dias estoy haciendo una obra de arte sobre el Mars 3.
Sí, claro, la culpa de que la URSS fallase en su programa de exploración de Marte es de Stalin. Pues vale. Así me gusta, opiniones bien argumentadas.
Y la culpa de que Japón fallase con las misiones Nozomi y Akatsuki supongo que será de Hirohito, ¿no? ¡Banzai!
Saludos.
Edgar Alonso.. el autor tiene razón. Yo he visto micrografías electrónicas de barrido de microchips soviéticos en la revista AW&ST de los años 80 , que eran copias exactas de chips americanos de hacia mas de 10 años.La electónica de sus naves era bastante rudimentaria , por ejemplo en los años 70-80 la vida útil de un satélite INTELSAT-4 o 5 o uno de los modelos HS-376 era de 7 a 12 años, en cambio los Molniya-1 y 3 y los Raduga o Ekran no superaba los 3 años normalmente y tenian que lanzar bastantes (muchos de ellos estaban estabilizados en 3 ejes gastando hidrazina regularmente para orientarse, mientras que una rotación ,con antenas en «despun» seria mucho mas lógica )
Efectivamente, el amigo Stalin consideraba la electrónica una Ciencia Burguesa. Las naves rusas de las que hablas en el post usaban sistemas de revelado químico y escaneo como lo hicieron los LUNAR ORBITER en los años 60; las imágenes de cámaras vidicon del Mariner-9 y 10 resultaron mas resolutivas que las pocas imágenes obtenidas por aquellas sondas marcianas rusas.
Yo tengo libros de electrónica y electromagnetismo rusos (por ejemplo de Igor Tamm), de la editorial Mir, muy buenos y baratos, pero no existia base industrial para el desarrollo de estas técnicas .
Pobre Hirohito , el no ha hecho ni dicho nada