

Situar un vehículo en la superficie de Marte es una idea que se remonta a principios del siglo XX, pero no sería hasta los años 60 cuando aparecieron los primeros conceptos serios de rovers marcianos. Estudiar el planeta rojo desde una plataforma móvil presenta una serie de ventajas evidentes, aunque las complejidades técnicas relacionadas a un sistema de este tipo también son enormes.

Hoy en día ha caído en el olvido, pero el primer vehículo que llegó a Marte fue el pequeño PrOP-M soviético. Este diminuto marsojod de 4 kilogramos de masa viajó en el interior de la cápsula de descenso de la sonda Mars 3 (M-71P), aunque desgraciadamente nunca pudo demostrar su valía: el contacto con la Mars 3 se perdió 14,5 segundos después del aterrizaje. El PrOP-M (ПрОП-М, Прибор Оценки Проходимости – Марс) no era autónomo, ya que estaba unido a la cápsula de aterrizaje por un cable que le suministraba la potencia eléctrica para funcionar (unos 5 W). Debía haber sido desplegado sobre la superficie mediante un brazo plegable y sus dimensiones eran de 21,5 x 16 x 6 cm. Era capaz de alcanzar una velocidad de metro por minuto, paradójicamente, no muy diferente del moderno y enorme rover Curiosity. La carga científica del PrOP-M era muy rudimentaria y consistía en un simple mecanismo para medir la consistencia y densidad del suelo marciano alrededor de la zona de aterrizaje. El PrOP-M fue diseñado en menos de 18 meses por el VNII Transmash y utilizaba una curiosa forma de locomoción mediante esquíes que es desafía cualquier intento de descripción. Mejor vean el siguiente vídeo (minuto 3:40):


En Estados Unidos, las primeras propuestas de rovers marcianos aparecieron a principios de los 70 a resultas del programa Voyager, que posteriormente se transformaría en el famoso proyecto Viking. La idea era usar una sonda basada en el diseño de las Viking para mandar un vehículo a la superficie marciana. Incluso antes del éxito del doble aterrizaje de las Viking en 1976 se planteó enviar una Viking 3 con un rover en la ventana de lanzamiento de 1979. Se barajaron varias opciones: lanzar un pequeño rover de unos 100 kg en la cubierta superior de la sonda o desplegar uno o dos vehículos de gran tamaño usando la estructura de la Viking como plataforma de aterrizaje. En el primer caso, el rover hubiese podido servir para llevar muestras de rocas y regolito hasta la sonda principal y analizar el área de aterrizaje a distancias de 100-1000 metros, dependiendo del diseño final.




Casi al mismo tiempo, la empresa Martin Marietta -contratista principal de las Viking- y el Centro Langley de la NASA estudiaron seriamente la posibilidad de desarrollar una Viking 3 móvil equipada con orugas en vez de un tren de aterrizaje fijo. En realidad, no se trataba de un sistema oruga convencional, sino de unas bandas elásticas denominadas ELMS (Elastic Loop Mobility System). La idea era lanzar una de estas Viking móviles en la ventana de lanzamiento de 1979 o 1981. Por otro lado, los ingenieros consideraban que estos diseños de movilidad reducida tendrían muchas dificultades en circular por el pedregoso paisaje que habían fotografiado las dos Viking. Lástima que pudiesen saber que Marte también tiene llanuras libres de piedras como Meridiani Planum. Por esa misma época, el JPL, atraído por el diseño de orugas con ELMS, propuso varios rovers que usaban todo tipo de combinaciones de orugas y ruedas tradicionales.
{kind=link}




A resultas del éxito de la misión Viking, en 1977 el Mars Science Working Group de la NASA propuso un rover de gran tamaño que debería haber sido lanzado en 1983. Este rover de más de 100 kg habría sido una especie de mini-Curiosity de los años 80 dotado de cuatro orugas y alimentado por un generador de radioisótopos (RTG). La NASA imaginó una ambiciosa misión similar a las Viking formada por dos naves de 5195 kg que serían lanzadas por el transbordador espacial, cada una de ellas formada por un orbitador de 3683 kg y dos aterrizadores de 1210 kg, rovers incluidos, además de varios penetradores de 4 kg. Los rovers gemelos de 1984 debían haber estudiado las condiciones de habitabilidad de Marte y continuar los análisis geológicos iniciados por las Viking, para lo cual contaban con un brazo robot capaz de excavar hasta los 25 centímetros de profundidad.


Gracias a un avanzado -para la época- sistema autónomo de navegación mediante láseres, los rovers habrían sido capaces de tomar unas 80 imágenes al día y de recorrer un total de 150 kilómetros en un año marciano (unos dos años terrestres), a una velocidad de 300 metros al día, unas cifras que hoy resultan realmente increíbles. Como comparación, Curiosity recorrerá unos 20 kilómetros en un año marciano. Habrían aterrizado en el fondo de los cañones Capri Chasma y Candor Chasma, que forman parte del sistema de cañones de Valles Marineris. Sin duda, las vistas habrían sido realmente espectaculares, como también lo hubiera sido el coste de esta misión. La era Apolo con sus generosos fondos ilimitados había pasado y la NASA se vio obligada a olvidarse de robots móviles tan costosos.
A finales de los años 70, el interés de la NASA hacia Marte disminuyó considerablemente. La cobertura fotográfica global de los dos orbitadores Viking había confirmado las peores previsiones de la sonda Mariner 9. Marte era un mundo seco, helado y muerto. A pesar de algún que otro experimento con resultados confusos, las dos sondas de aterrizaje no descubrieron vida de ningún tipo en la superficie. Hay que tener en cuenta que en 1976 mucha gente pensaba seriamente en la posibilidad de que existiesen formas de vida en Marte. El propio Carl Sagan comunicó a la prensa durante los días previos al aterrizaje de la Viking 1 que no sería descabellado el descubrimiento de algún tipo de vegetación en las rocas. Habría que esperar casi una década para que un análisis concienzudo de los datos de las misiones Viking revelase un mundo más complejo de lo esperado, con un pasado húmedo y biológicamente más interesante.
Como resultado, a mediados de los 80 florecieron todo tipo de propuestas más o menos económicas y más o menos excéntricas, como la Mars Ball, una -literalmente- pelota de playa marciana que sería arrastrada de un lado a otro por el débil viento marciano, pudiendo atravesar cualquier tipo de terreno sin esfuerzo. El proyecto Mars Ball ha sobrevivido hasta nuestros días reencarnado en varios proyectos similares, como el Mars Tumbleweed y otros parecidos. Huelga decir que ninguna de estas propuestas ha sido aprobada por parte de la NASA para una misión formal, aunque es posible que nos llevemos alguna sorpresa en el futuro.

A finales de los años 80, la NASA quería dar prioridad a una misión de retorno de muestras marcianas, dentro de la cual los rovers serían una herramienta fundamental. Por esta época aparecen los primeros diseños de suspensión con seis ruedas que posteriormente serían empleados en los rovers Sojourner, MER o Curiosity, como es el caso del diseño ‘Delta-Goat’ del JPL. Estas propuestas serían estudiadas seriamente por la fracasada iniciativa SEI (Space Exploration Inititative) de Bush padre, aunque luego serían olvidadas a mediados de los años 90.



Peor no sólo existieron proyecto de rovers estadounidenses. En los 80 se consolidó en la URSS el diseño de Marsojod con seis ruedas cónicas que estuvo a punto de volar a Marte en la década de los 90. De hecho, durante varios años a finales de los 80 y principios de los 90 se consideró lanzar una misión conjunta Rusia-EEUU usando este diseño. En cualquier caso, las vicisitudes del Marsojod bien merecen una entrada aparte.

Pero el primer rover funcional que recorrió la superficie Marte sería el pequeño Sojourner, un diminuto vehículo de 10,5 kg y seis ruedas alimentado por energía solar que viajó a lomos de la Mars Pathfinder. Esta sonda fue una misión de bajísimo coste que pudo ver la luz gracias a la por entonces revolucionaria política ‘faster, better, cheaper’ del administrador de la NASA Dan Goldin. El rotundo éxito mediático de la Mars Pathfinder volvió a despertar el interés en la exploración del planeta rojo. El rover gemelo de Sojourner, denominado Marie Curie, debía haber viajado a Marte en la misión Mars Surveyor 2001, pero lamentablemente esta sonda fue cancelada después de que la Mars Polar Lander dejase un bonito cráter humeante en el polo sur del planeta. Precisamente, a raíz de este accidente la NASA dejó de centrarse en propuestas de rovers pequeños derivados del Sojourner -como por ejemplo la familia Rocky- para pasar a jugar en ligas mayores.



Efectivamente, de las cenizas de la Polar Lander surgieron los archifamosos rovers gemelos MER (Mars Exploration Rovers), más conocidos como Spirit y Opportunity, de 173 kg cada uno. Unos gigantes al lado de los liliputienses Sojourner y Marie Curie. Los MER atrajeron aún más el interés del público hacia la exploración del planeta rojo y allanaron el camino para la ambiciosa y compleja misión Mars Science Rover, poco después rebautizada como Mars Science Laboratory (MSL). En principio, MSL debía haber sido un rover solamente un poco más grande que los MER, de unos 500 kg, aunque poco a poco fue aumentando su masa hasta alcanzar los actuales 900 kg.



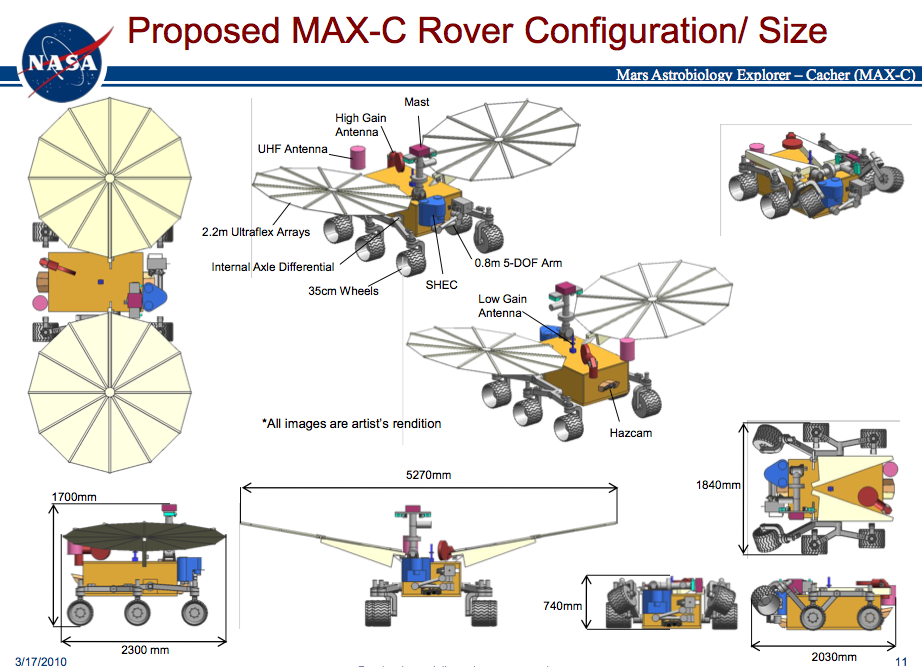

Del pequeño y simple PrOP-M al complejo y enorme Curiosity han transcurrido más de cuatro décadas de exploración de Marte. Lamentablemente, tras la retirada de la NASA del proyecto ExoMars europeo y la cancelación del rover MAX-C, es muy posible que Curiosity sea el primer y último gran rover que recorra la superficie marciana en mucho tiempo. Disfrutemos mientras podamos.
Referencias:
- A conceptual Design and Operational Characteristics for a Mars Rover for a 1979 or 1981 Viking Science Mission, W. L. Darnell et al. (NASA Langley Research Center, 1974).
- Mars 1984 Rover-Orbiter-Penetrator Mission (1977), David F. Portree.
- A Mars 1984 Mission, Mars Science Working Group (NASA, 1977).
- United States Planetary Rover Status (JPL, 1989).
- Mars Multi-Rover Mission (1977), David F. Portree.
Curioso, muy curioso 😉
Espero que sea una misión de los grandes descubrimientos
Lo triste es que no este preparado para detectar de forma directa algún tipo de vida, como si lo estaban las Vikings, …dado el tamaño y capacidad energética de Curiosity dudo que hubiera sido un problema incorporar los elementos necesarios.
Tengo la impresión de que han querido ir paso a paso, siendo Curiosity la penultima etapa de una carrera que empezó con Spirit y Opportunity…y ahora se han dado con las puerta en las narices con el recorte brutal sufrido en el presupuesto para exploración planetaria de Obama and friends. De haberlo sabido quizás habríon planetado esta misión de forma diferente
Personalmente siempre considere la búsqueda de actividad biológica la prioridad en la exploración marciana, por lo que significaría y porque es lo único que de verdad provocaría un interés y apoyo masivo a la carrera espacial, y por ello nunca acabe de entender esa obsesión de ir «por el camino más largo»
Disfrute mucho este articulo
La ventana del 13′ esta reservada para MAVEN, la del 16′ EE.UU se la van a saltar de plano y quizas China mande algo ademas de Europa con el MTGO, la del 18′ mandaran si el dinero quiere el rover de Exo-Mars, y EE.UU quizas un orbitador del tipo Odiseey y uno o dos landers medianos del tipo Phoenix o InSight, apenas hasta el 20′ creo que la NASA mandara ya uno o dos rovers medianos del tipo MAX-C con el objetivo del regreso de muestras, pero repito hasta 2020. Como dices tendremos que esperar 8 años para ver otra vez un rover tan complejo y apasionante.
¿Alguien conoce un buen texto sobre la historia de las Viking?
Yo tambien he disfrutado mucho con el articulo es apasionante ver la cantidad de rovers que se han estudiado y los que se han mandado a Marte. Aunque sigo echando de menos alguna misión a algún planeta gigante exterior Urano o Neptuno tanto da. Soñar es gratis aunque sepa de antemano que pasaran en el mejor de los casos decadas antes de que se decidan por mandar algo alli.