

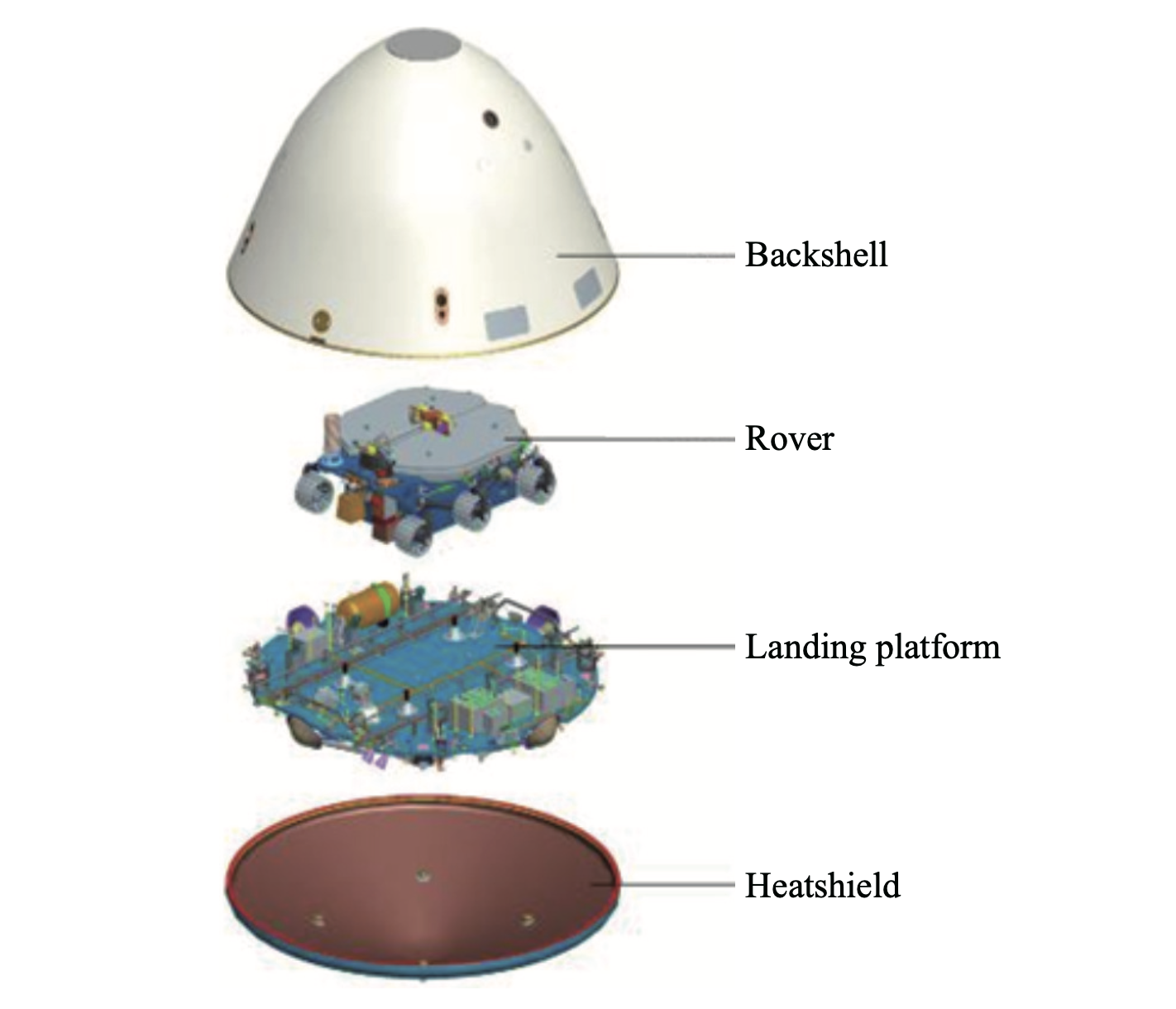
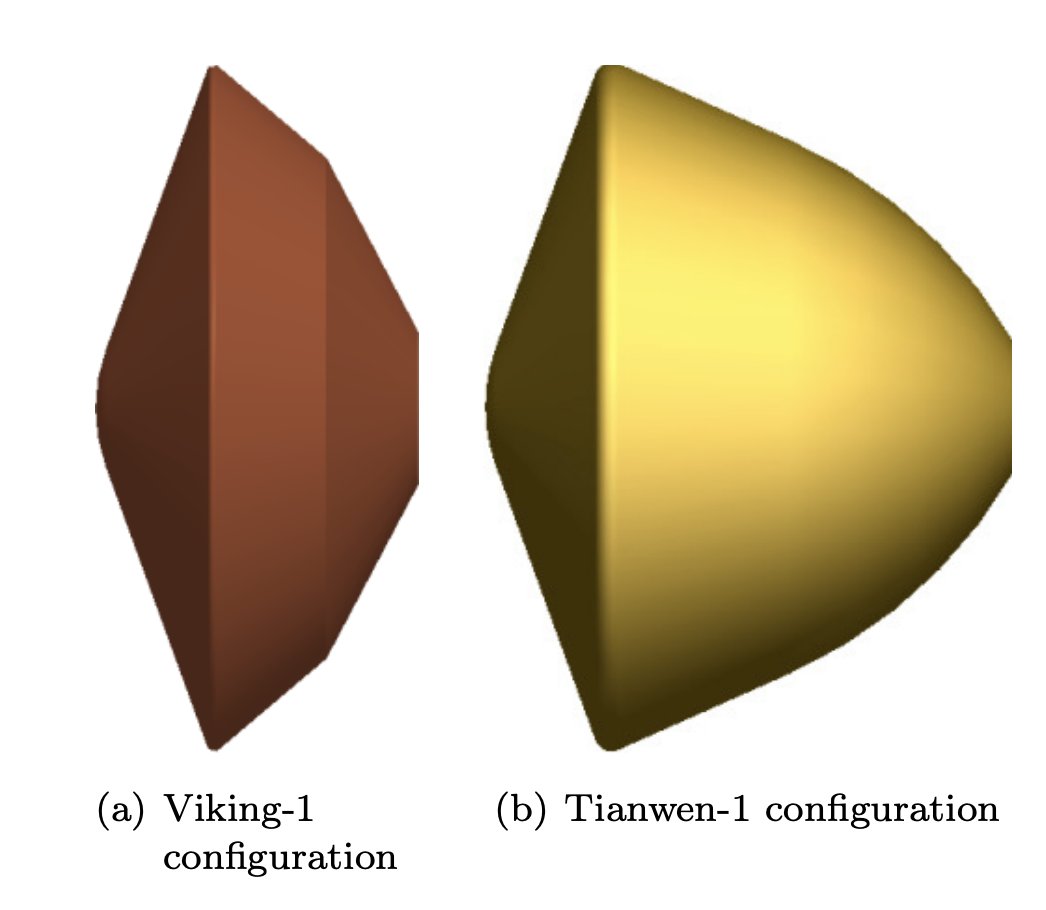
El 14 de mayo de 2021 a las 23:18 UTC China hizo historia al convertirse en el segundo país en posar suavemente con éxito un artefacto funcional en la superficie de Marte. El rover Zhurong (祝融号) es además el primer vehículo móvil no estadounidense que se desplaza por el planeta rojo transmitiendo datos e imágenes. Pero alcanzar la planicie de Utopia Planitia no fue sencillo. El rover Zhurong tuvo pasar por sus particulares «nueve minutos de terror», como se conoce a la fase de Entrada, Descenso y Aterrizaje, EDL por sus siglas en inglés (para ser precisos, fueron 535,9 segundos). A diferencia de los cinco rovers de la NASA que han viajado a Marte, Zhurong no entró en la atmósfera del planeta rojo desde una trayectoria directa desde la Tierra, sino que lo hizo desde la órbita, como las sondas de aterrizaje de las misiones Viking 1 y 2 en los años 70. La cápsula con la etapa de descenso y el rover se separaron del orbitador Tianwen 1 (天问一号), que llevaba dando vueltas alrededor de Marte desde el 10 de febrero, y, después de unas 3,5 horas de trayectoria en solitario, entró en la atmósfera de Marte a 125 kilómetros de altura y 4,8 km/s (o sea, 17300 km/h; como comparación, Perseverance entró a 5,4 km/s).

A pesar de ser la primera misión planetaria de China, la misión Tianwen 1 introdujo una serie de novedades tecnológicas muy ambiciosas, siendo las más importantes el guiado de la cápsula mediante una superficie aerodinámica para aumentar la precisión en el aterrizaje y el uso de imágenes en la etapa de descenso propulsado final para elegir una zona de descenso adecuada. Además, la cápsula y la etapa de descenso incluían cámaras para filmar el despliegue del paracaídas. De hecho, hasta la misión Perseverance (Mars 2020) la NASA no había grabado nunca el despliegue del paracaídas ni usado imágenes para guiar su trayectoria. Durante la fase inicial de descenso a través de la atmósfera, la cápsula de la Tianwen 1 mantuvo su orientación gracias a la ayuda de propulsores de gas. 67,9 segundos después de la entrada atmosférica, dio comienzo la fase de control mediante la sustentación, durante la cual el ordenador controló el ángulo de giro de la cápsula para generar una fuerza de sustentación adecuada con el objetivo de cambiar la trayectoria, aumentando así la precisión del aterrizaje. La elipse de aterrizaje era de unos 100 x 40 kilómetros, comparable a las elipses de las sondas Phoenix o InSight de la NASA, aunque las elipses de estas sondas eran más estrechas porque entraban directamente desde una trayectoria interplanetaria.




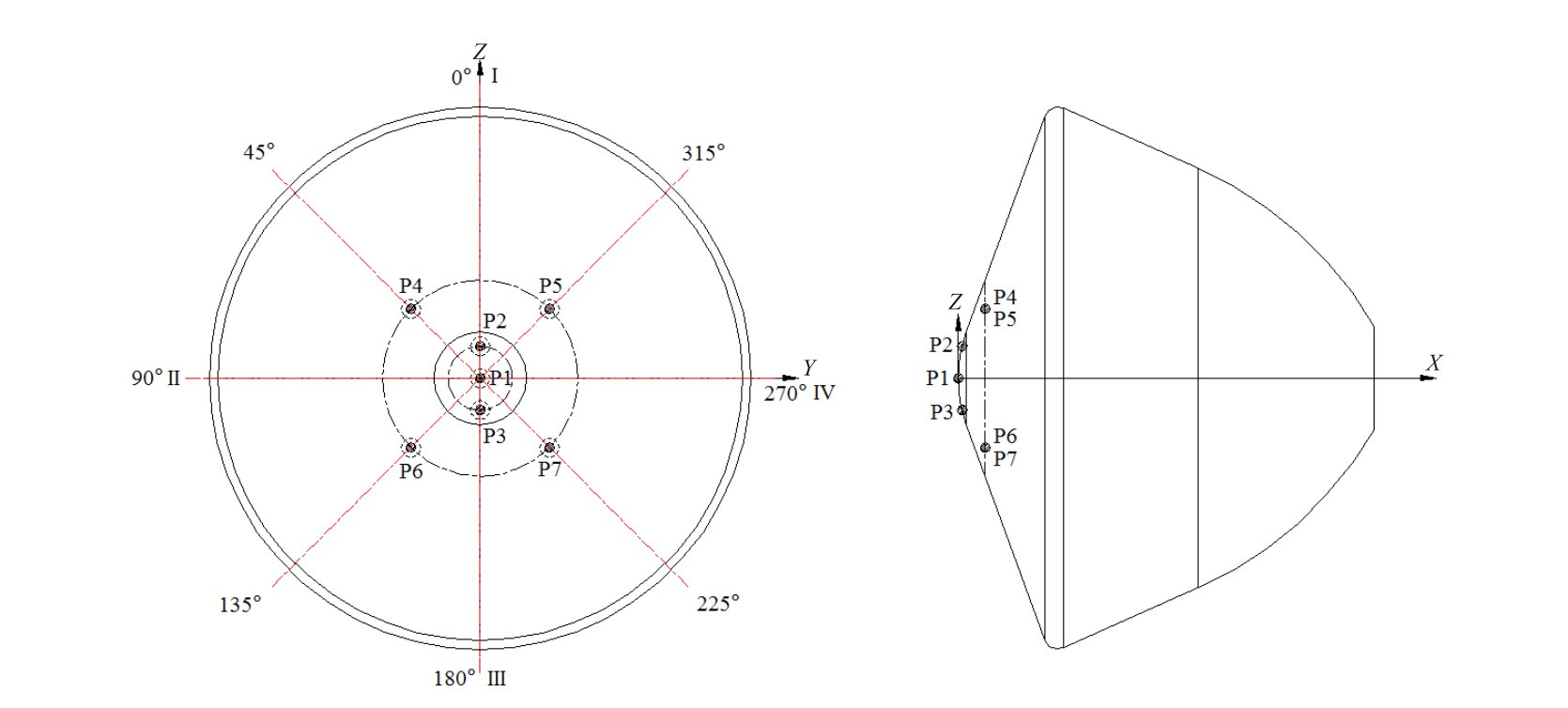
Una vez la velocidad hubo descendido hasta 2,8 Mach, se desplegó la superficie aerodinámica de un lado de la cápsula. Este flap sirvió para volver a colocar el centro de gravedad de la cápsula en el eje del vehículo, además de asegurar un ángulo de ataque de 0º para el despliegue del paracaídas a velocidades supersónicas (en las misiones Curiosity y Perseverance, esto se logró mediante la inclusión de varios lastres de tungsteno que se expulsaron antes de la apertura del paracaídas). El proceso de despliegue del paracaídas comenzó a los 278,9 segundos y se produjo a una velocidad de 1,8 Mach. El paracaídas tenía una masa de 39,5 kg, una superficie de 114 metros cuadrados (200 metros cuadrados sin tener en cuenta el inflado) y fue diseñado para ser desplegado a una velocidad máxima de 2,5 Mach. El proceso de apertura fue filmado mediante dos cámaras situadas en el escudo térmico trasero (backshell).







Posteriormente, se separó el escudo térmico frontal y se produjo el despliegue de las patas del tren de aterrizaje. Una vez las patas de la etapa de descenso se abrieron, comenzó a funcionar el radar Doppler de aterrizaje, que verificó la altitud y velocidad del vehículo con respecto al suelo gracias a varios haces. 447,8 segundos tras la entrada atmosférica y a 1353,26 metros de altitud y 95 m/s de velocidad, la etapa de descenso con el rover se separó del backshell y el paracaídas. En ese momento comenzó la fase de descenso propulsado. Durante la separación de la etapa, la velocidad no podía superar los 115 m/s (414 km/h). Para entonces la trayectoria de descenso era casi vertical. Lo primero que hizo la etapa fue realizar una maniobra para desplazarse hacia un lado y evitar una posible colisión con el escudo térmico trasero y el paracaídas. Posteriormente, la etapa escaneó el terreno de forma autónoma mediante cámaras y sensores LIDAR para buscar la mejor zona de aterrizaje.
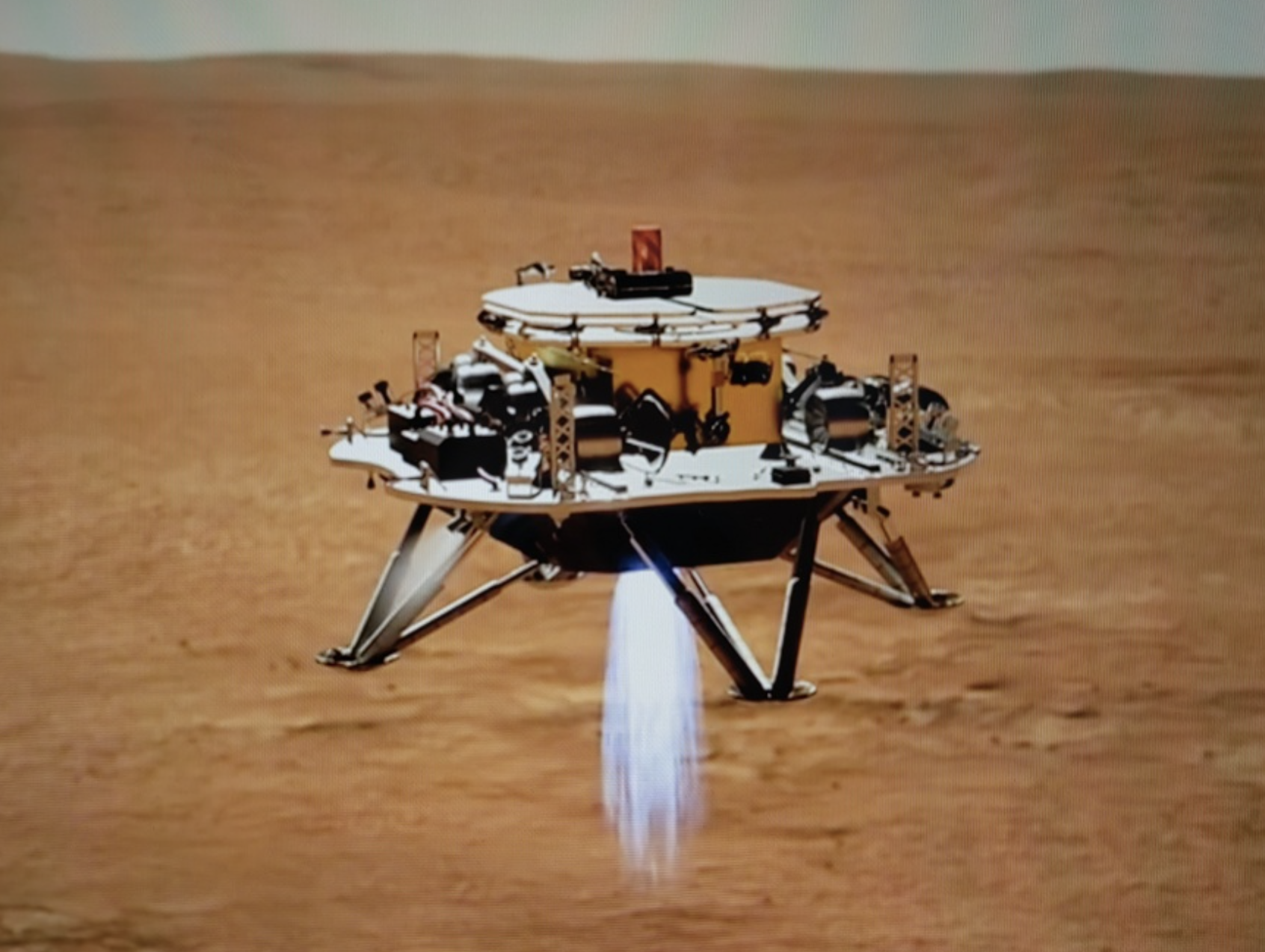

La etapa de descenso usó su motor YF-36A de 7500 newton de empuje máximo para frenar la caída. El motor fue capaz de modificar su empuje entre los 1500 y los 5000 newton según la fase de la misión para facilitar el descenso. También se emplearon 22 propulsores (16 propulsores de 250 newton y 6 de 25 newton) para orientar la etapa adecuadamente durante esta delicada fase. La mitad de los propulsores de 250 newton estaban situados de forma asimétrica para facilitar el control de posición y la maniobra de alejamiento del backshell. Durante esta fase, el ordenador era consciente de su orientación gracias a los 6 acelerómetros y 6 giróscopos de la Unidad de Medida Inercial (IMU).
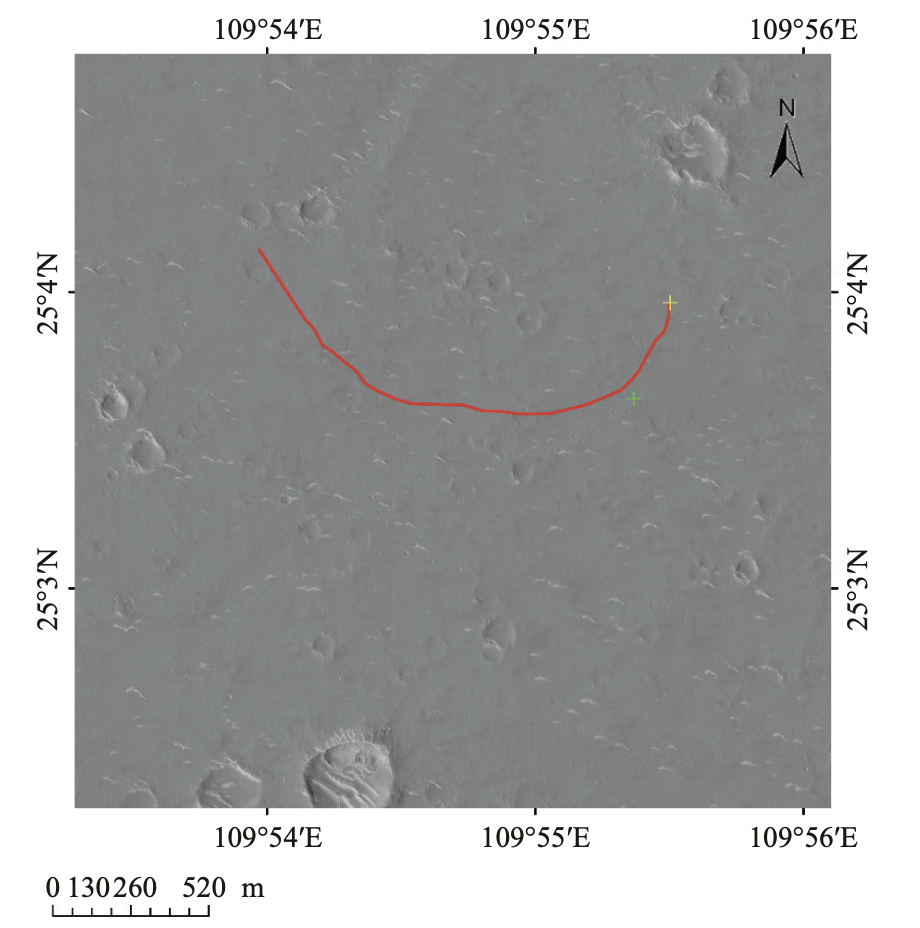

A 100 metros de altitud la etapa frenó su descenso y se mantuvo sobre el terreno para analizar las características de la superficie con sus cámaras (con un campo de 30º x 30º). El sistema de navegación óptico de la Tianwen 1 está basado en el empleado en las sondas lunares Chang’e 3, 4 y 5, pero, debido a las características de la misión, el número de imágenes por segundo era sensiblemente inferior, una cada 4 segundos, en vez de las 10 imágenes por segundo de las Chang’e. Pese a todo, gracias a este sistema la etapa logró cruzar un cráter de 18 metros de diámetro que estaba situado en la trayectoria de descenso. 535,9 segundos después de haber entrado en la atmósfera de Marte, la etapa de descenso de la misión Tianwen 1 aterrizó con éxito en Utopia Planitia (109,9259º este, 25,0659◦ norte) a una velocidad de unos 3,2 km/h. La etapa de descenso solo se desvió 1,56 metros con respecto a la trayectoria calculada por el ordenador.





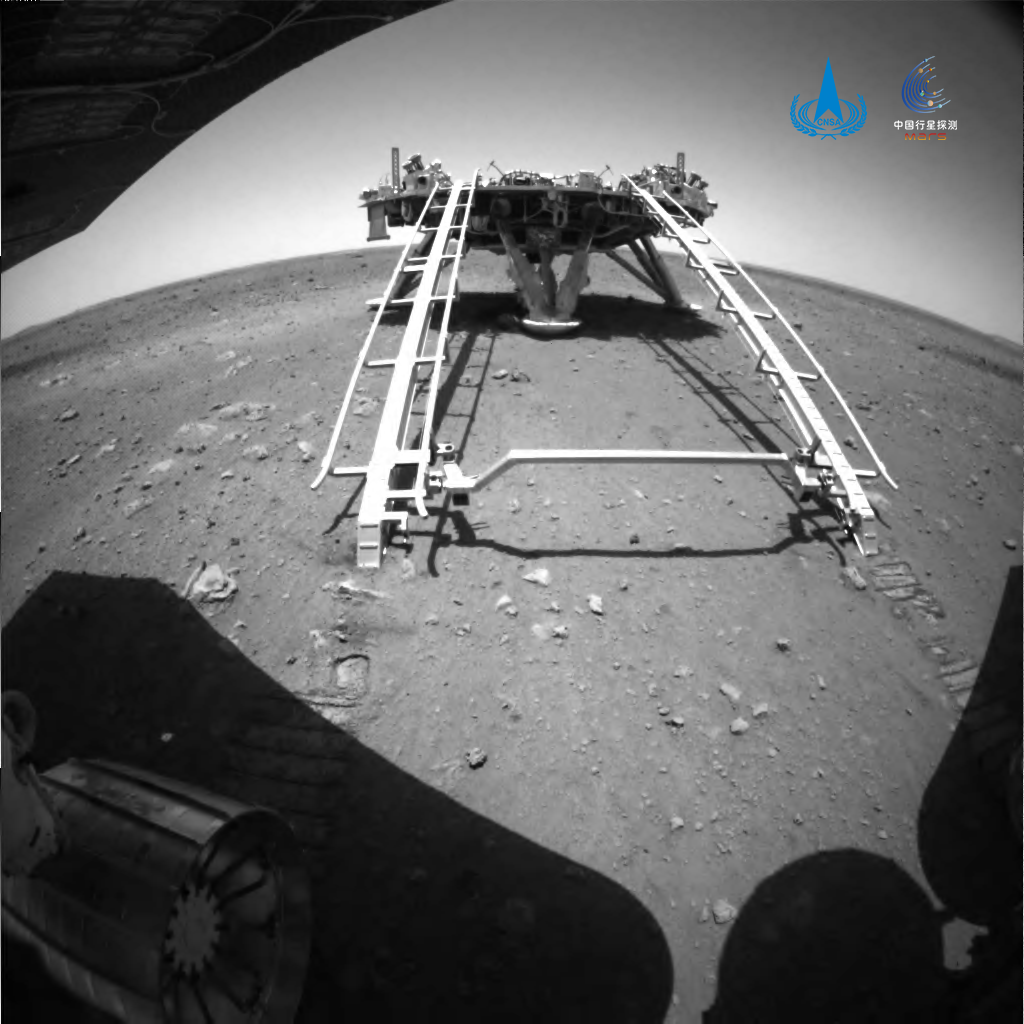
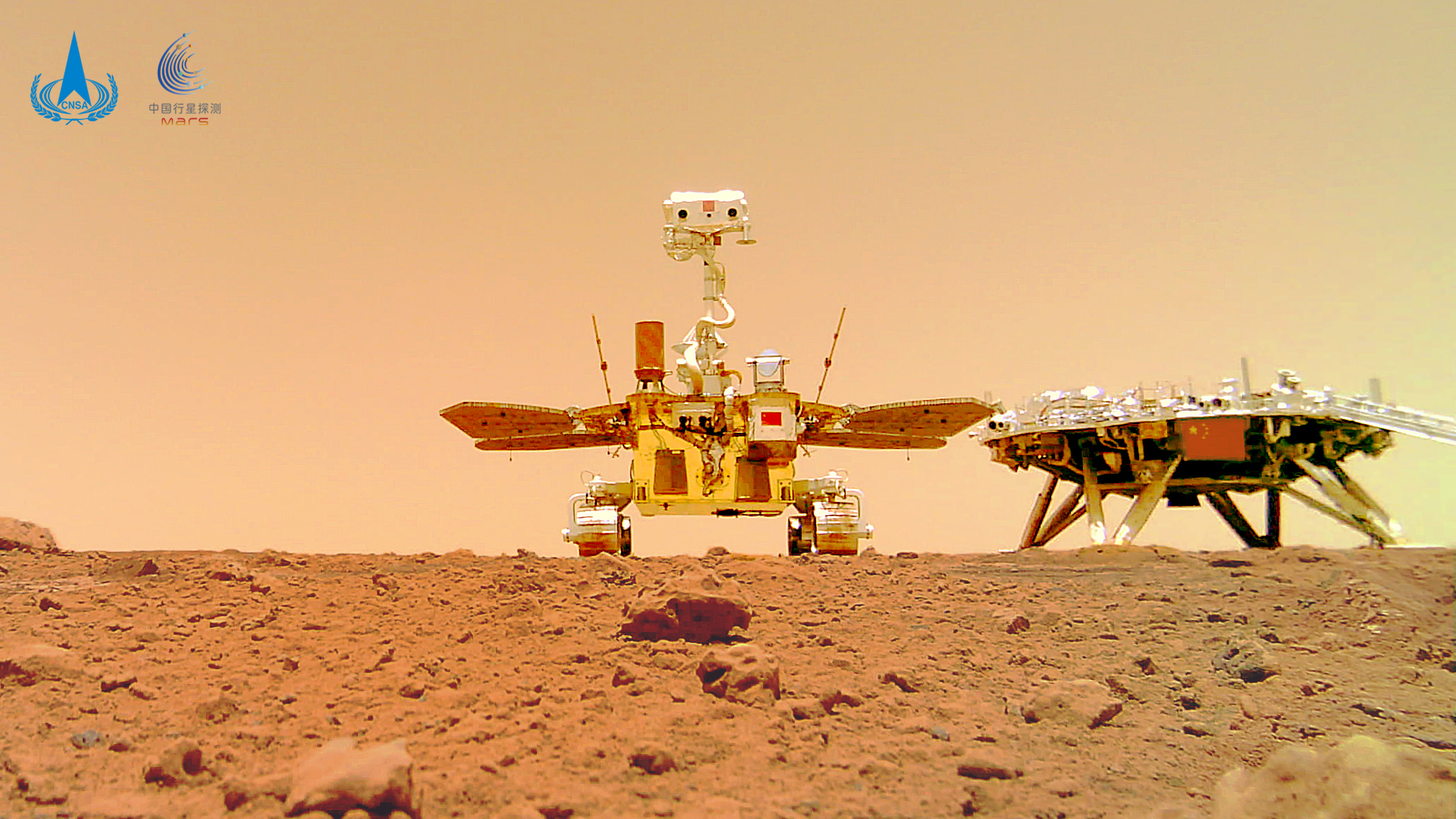
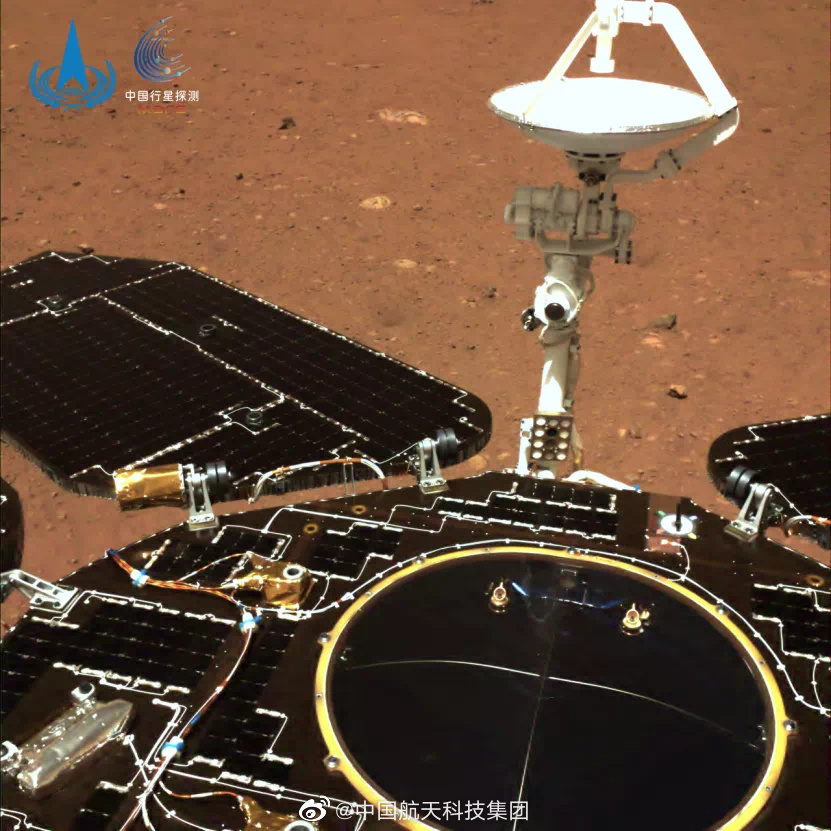
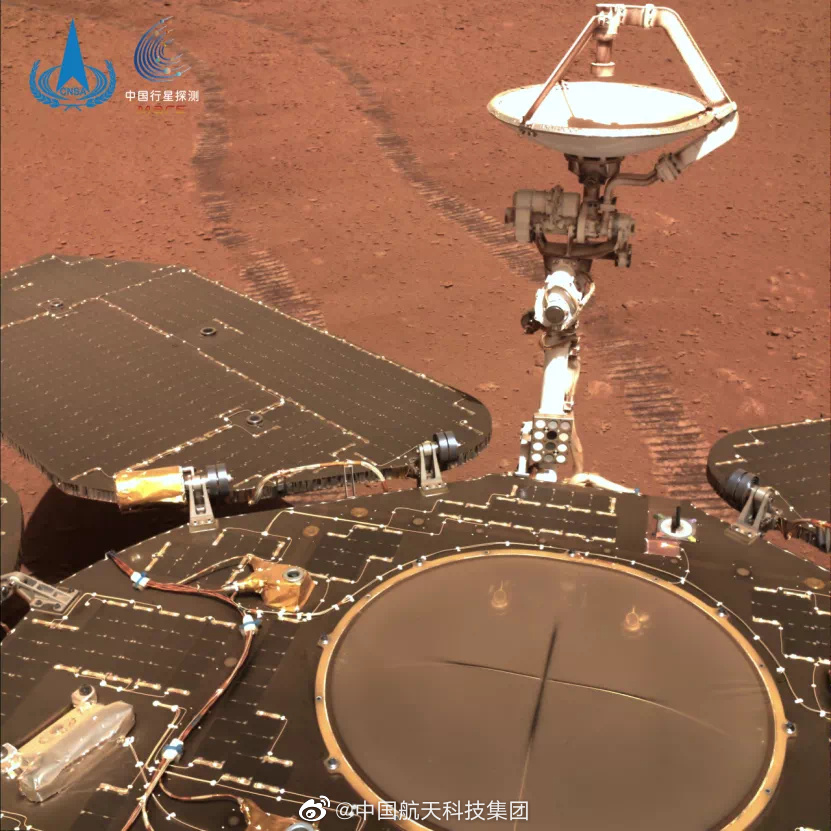
Después de desplegar las ruedas, los paneles solares y establecer comunicación con la Tierra de forma directa a través de la antena de alta ganancia —en banda X— y mediante el orbitador Tianwen 1 —en UHF—, el rover Zhurong pasó a comprobar el correcto funcionamiento de todos sus sistemas. Con una masa de 240 kg y unas dimensiones 2 x 1,65 x 0,8 metros, Zhurong es el tercer rover más grande que haya aterrizado en Marte, solo por detrás de los enormes Curiosity y Perseverance de la NASA. Las primeras imágenes de la misión no llegaron hasta el día 19 de mayo, un retraso debido en parte a la dependencia del orbitador Tianwen 1 para enviar grandes cantidades de datos durante una ventana de comunicación muy corta. No obstante, algunas imágenes, incluidas aquellas captadas por la etapa de descenso, no se harían públicas hasta un año más tarde (el primer panorama a color de la misión se tomó el 18 de mayo, con el rover sobre la etapa de descenso, aunque se publicó casi un mes más tarde). Por fin, el 22 de mayo de 2021 a las 02:40 UTC las ruedas de Zhurong tocaron el suelo marciano tras descender por la rampa de la etapa de descenso.
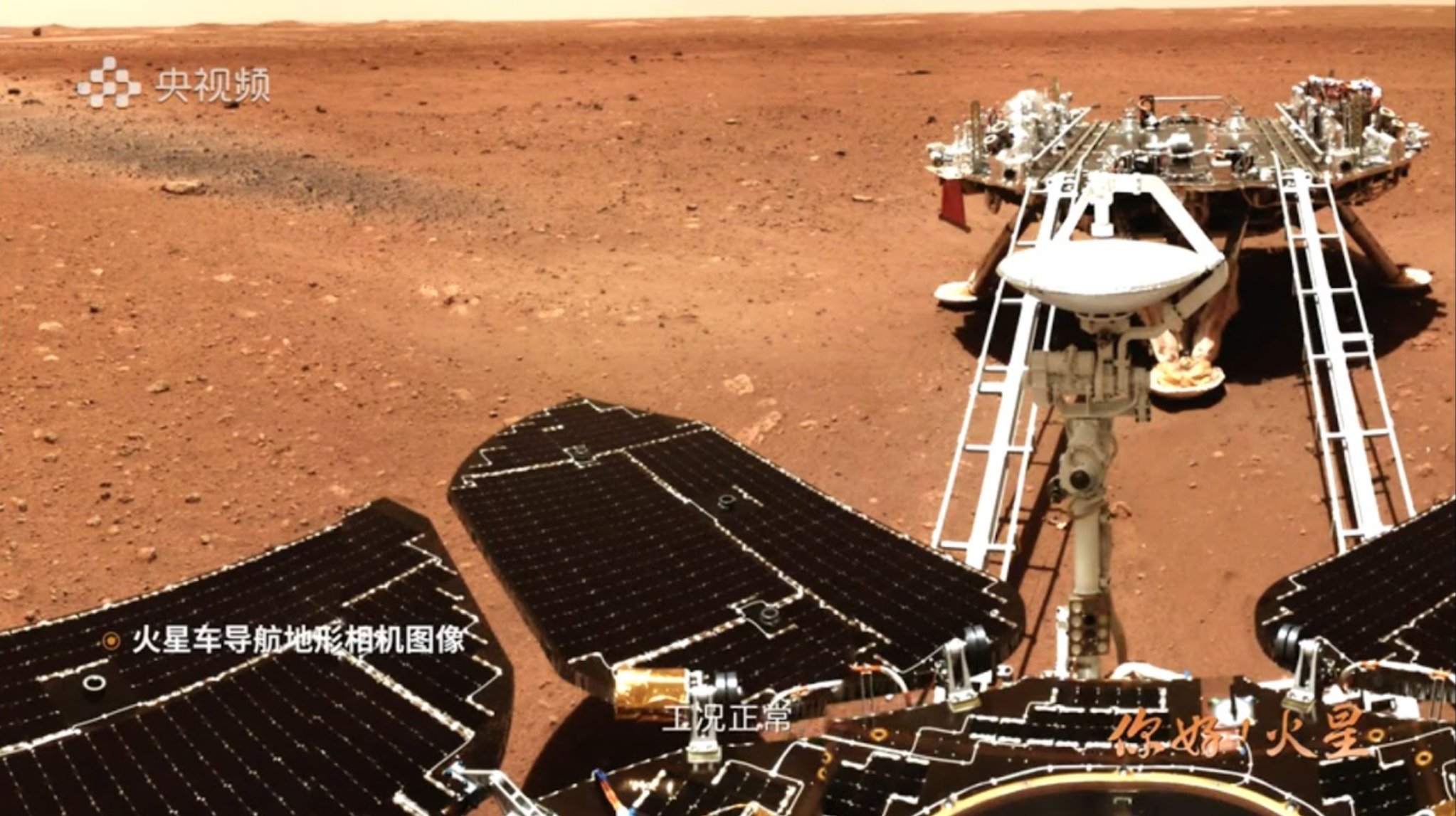



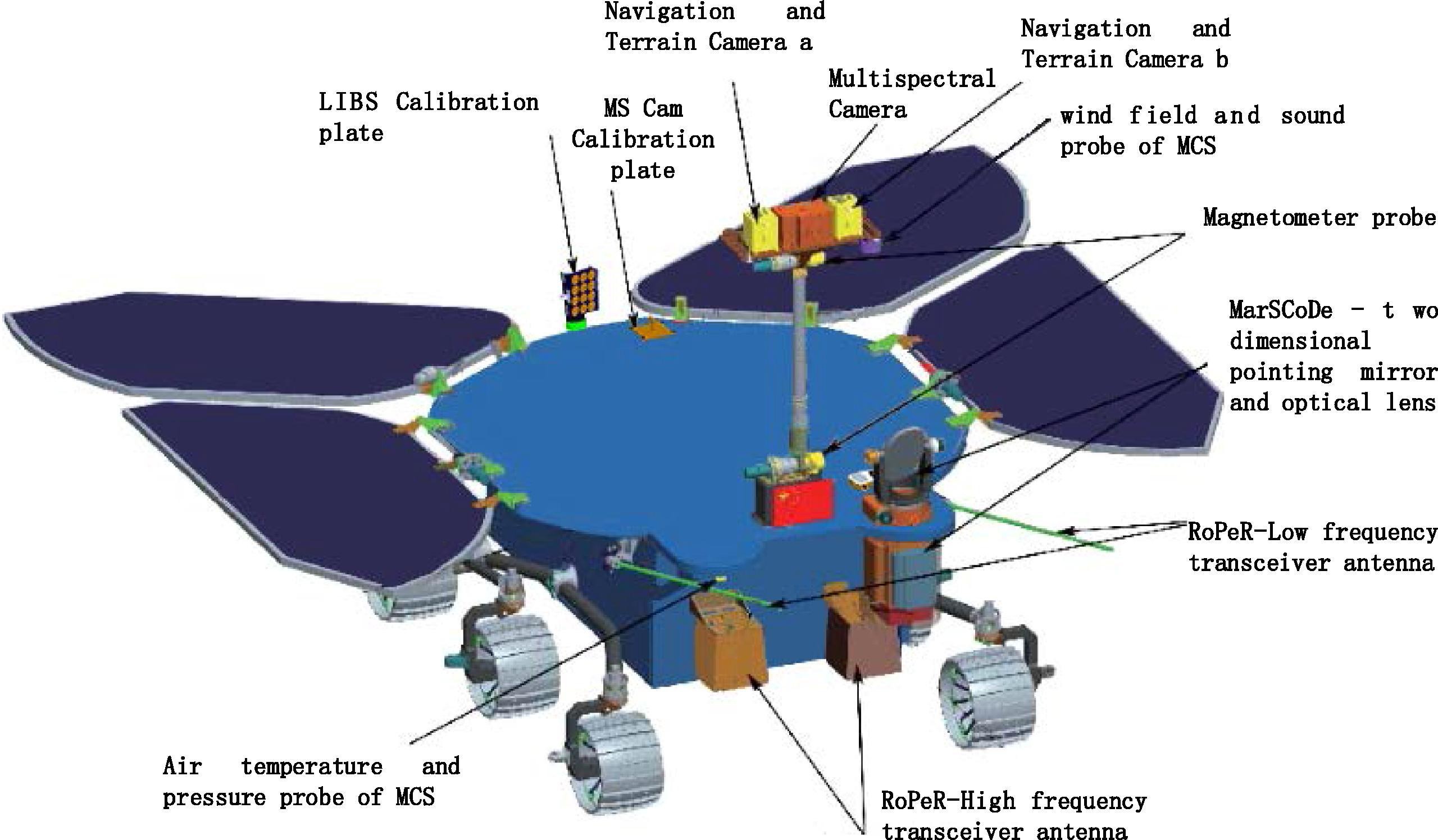
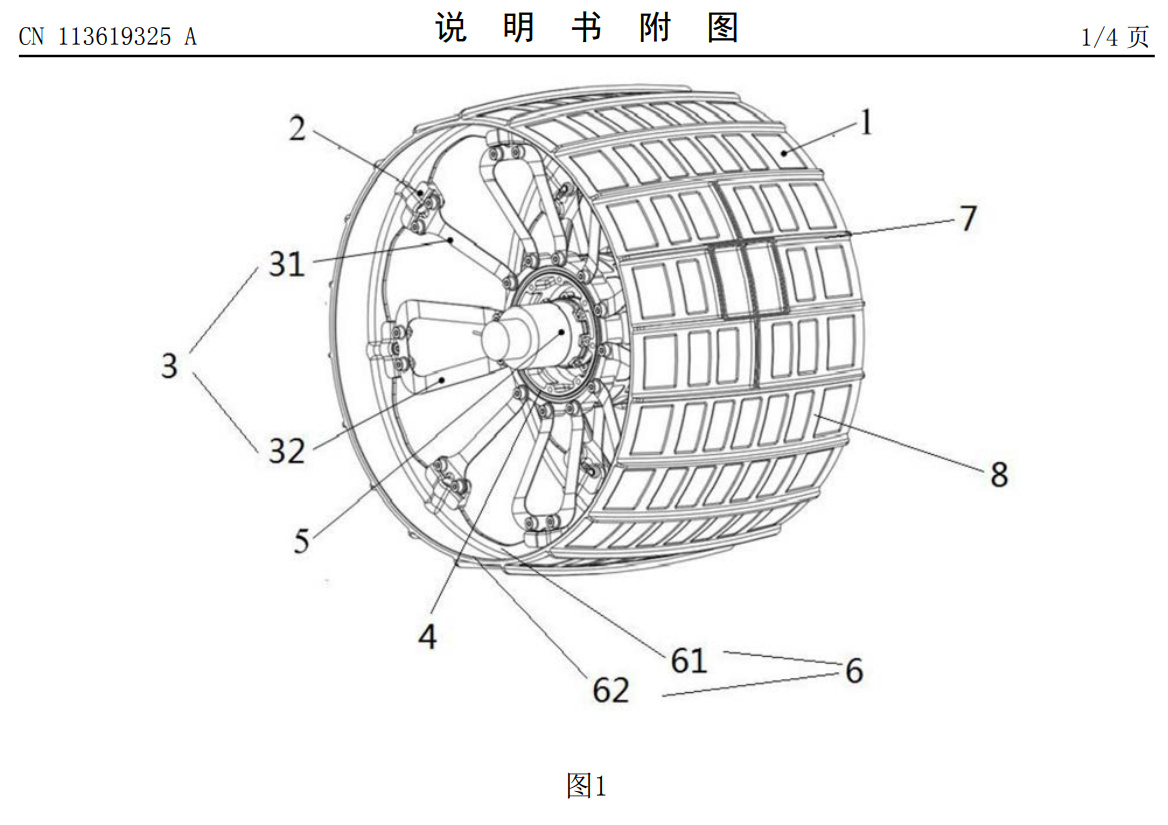
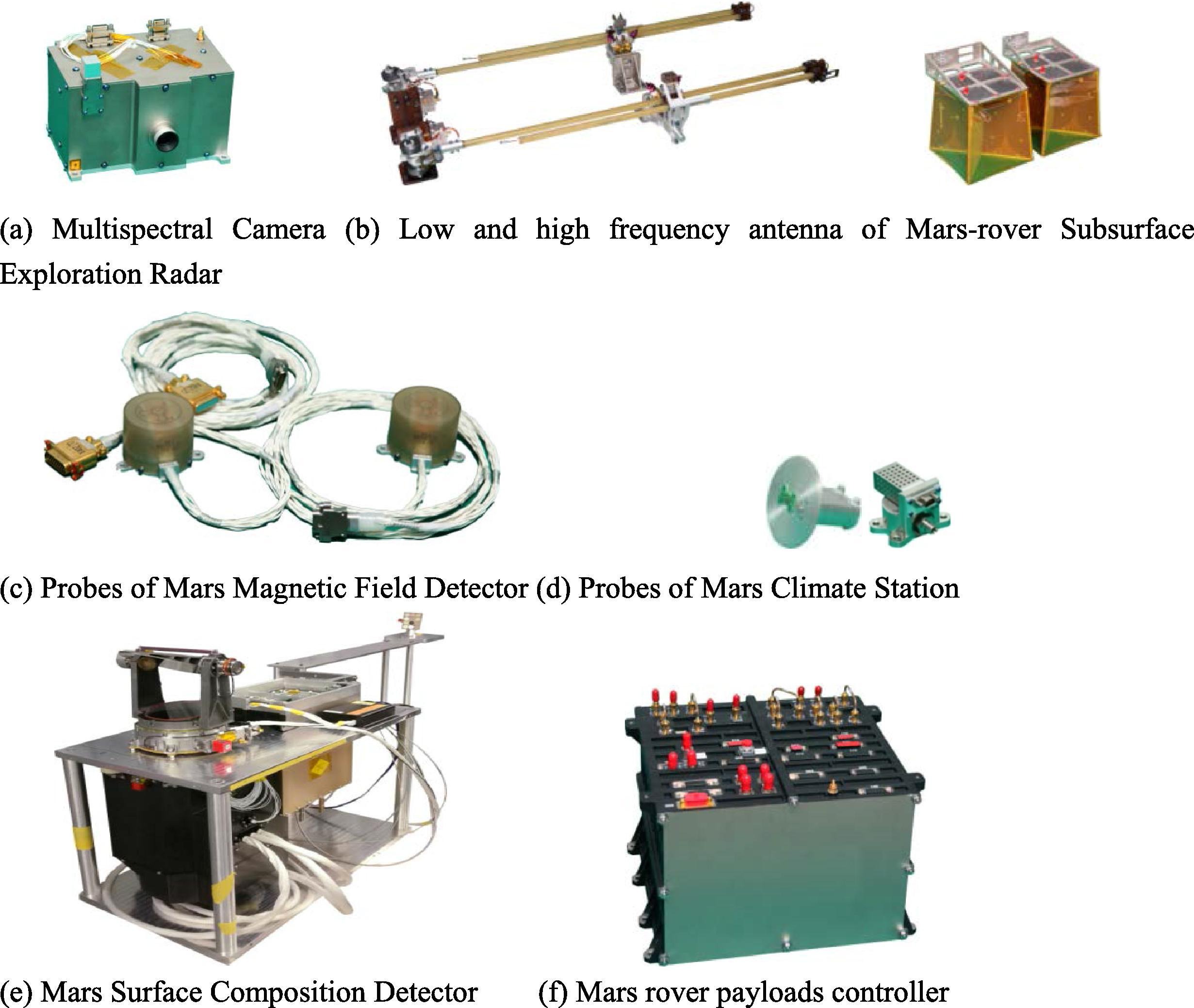
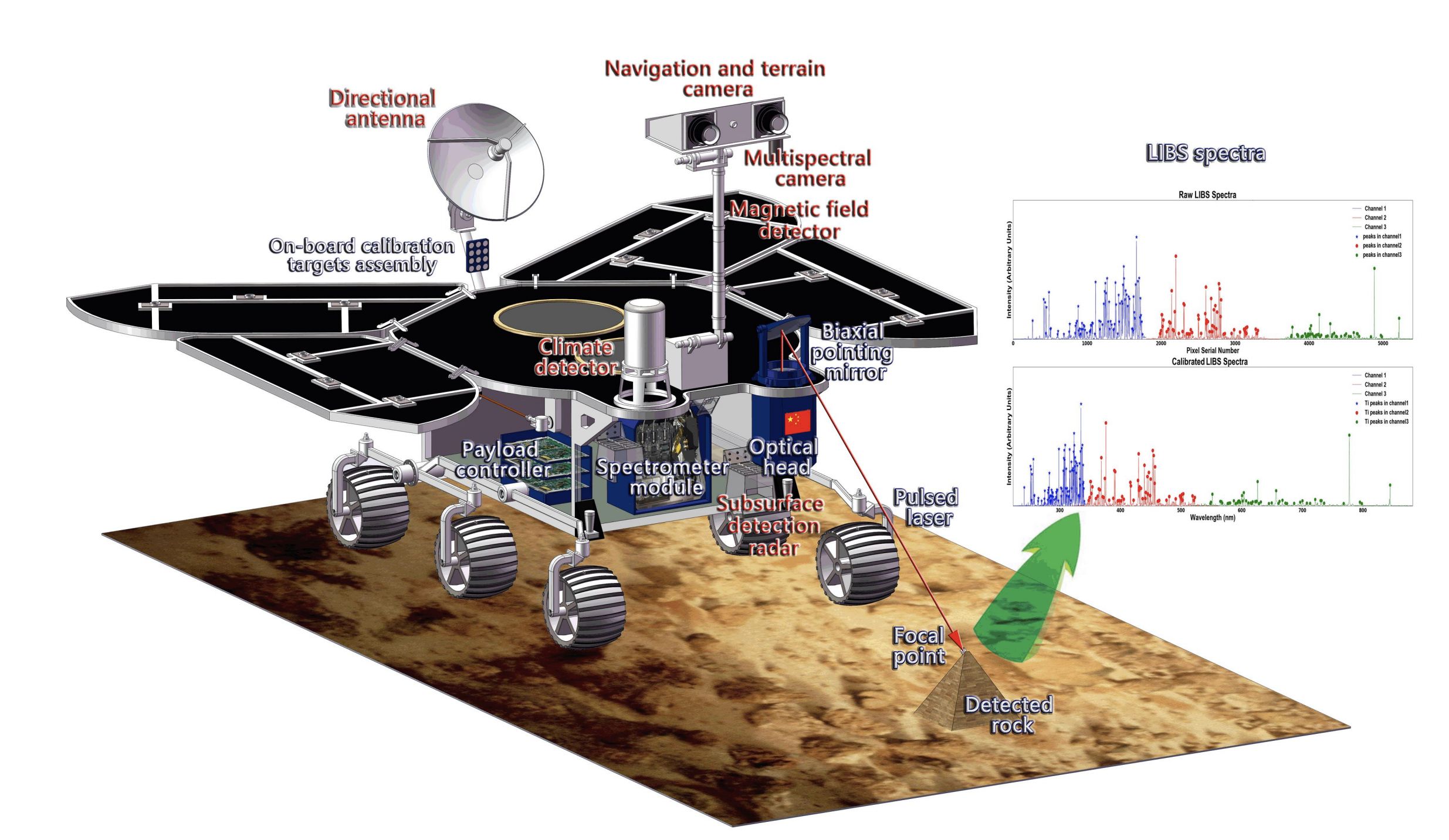
Zhurong procedió a estudiar la llanura de Utopia Planitia con sus seis instrumentos. Por un lado, la cámara a color MSCam (Multispectral Camera), formada por dos cámaras en estéreo con 9 filtros y un sensor de 2048 x 2048 píxeles, y las dos cámaras de navegación NaTeCam (Navigation and Terrain Camera), que solo funcionan cuando el rover está estático (durante la conducción se emplean las cámaras hazcams en blanco y negro). Las NaTeCam tienen un campo de visión de 46,5° x 46,5°. Las cámaras están situadas a 1,2 metros de altura, en el extremos del mástil. Por otro lado, tenemos el radar RoPeR (Mars Rover Penetrating Radar), basado en el que han llevado los dos rovers lunares Yutu y Yutu 2 y capaz de alcanzar los 100 metros de profundidad, aunque solo funciona con el rover en movimiento. El resto de instrumentos son el espectrómetro MarSCoDe (Mars Surface Composition Detector ), que incluye un espectrómetro infrarrojo y otro láser, además de un microscopio, la estación meteorológica MCS (Mars Climate Station) y el magnetómetro RoMAG (Mars Rover Magnetometer). El espectrómetro láser LIBS (Laser-Induced Breakdown Spectroscopy) ha sido desarrollado en colaboración con el CNES francés a través del IRAP (Institut de Recherche en Astrophysique et Planétologie) y puede analizar rocas situadas entre 1,6 y 7 metros de distancia.


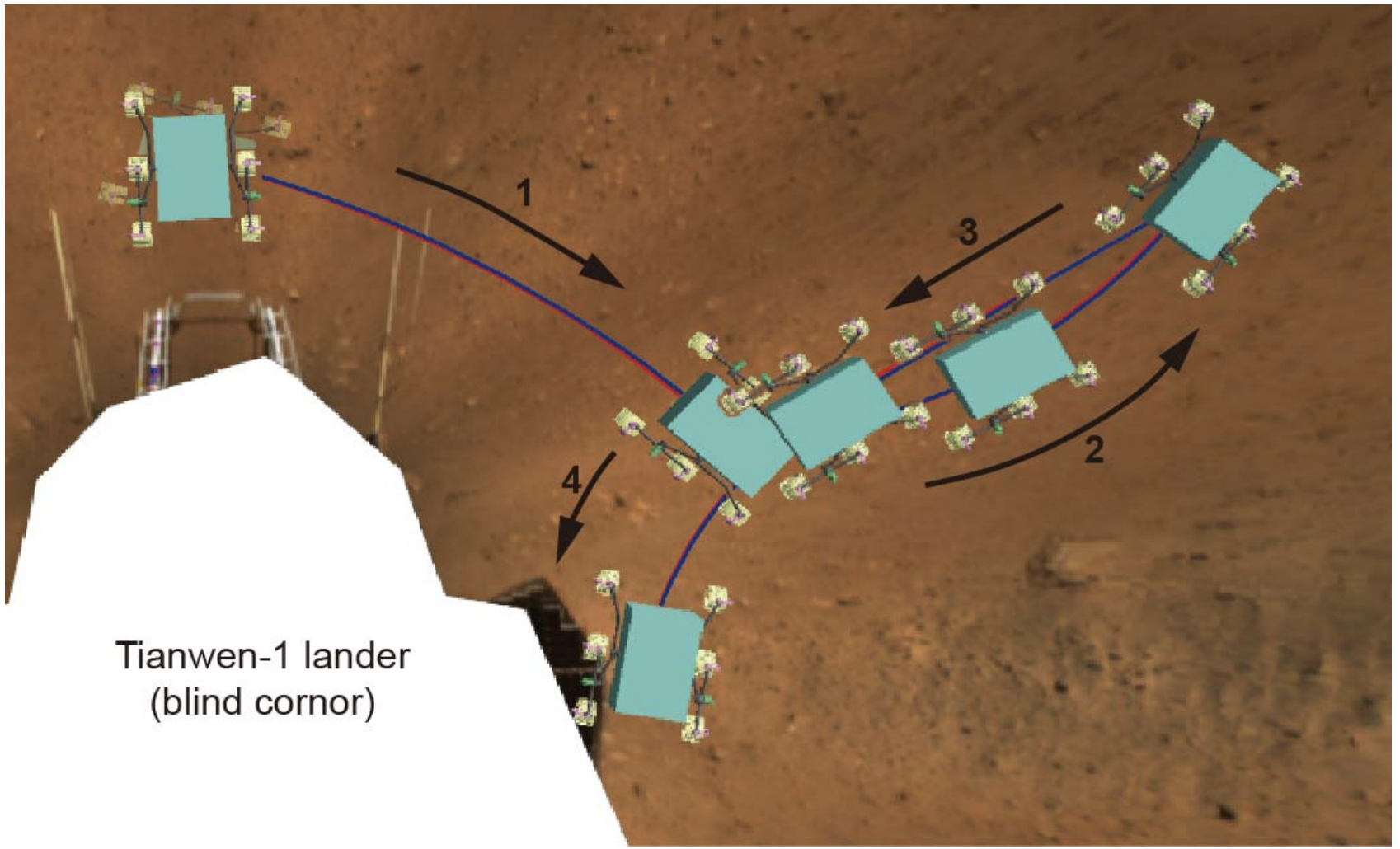
El 26 de mayo Zhurong fotografió el lado derecho de la etapa de descenso a unos 6 metros de distancia, por el lado en el que se encontraba una bandera china desplegable. El 1 de junio el rover dejó caer desde su panza una cámara WiFi que grabó imágenes y vídeos del rover junto con la etapa de descenso, unas imágenes que se publicaron el 11 de mayo, sin duda uno de los selfies más espectaculares de la historia de la exploración espacial. A pesar de que durante las primeras semanas Zhurong se movió lentamente, poco a poco fue desplazándose más rápido. En los primeros días, el vehículo apenas recorría entre 5 a 10 metros por día, pero a partir del verano logró aumentar esa cifra hasta los 20 o 30 metros por sol (día marciano). En el sol 54 de la misión, el rover ya había recorrido 300 metros. El 27 de junio la CNSA publicó el segundo panorama de Zhurong, el primero tomado sobre el suelo y que había sido captado el 16 de junio). Ese día también se publicaron los vídeos del despliegue del paracaídas durante el descenso y del rover moviéndose por la superficie (Zhurong es el segundo rover que ha grabado sonidos en la superficie de Marte después de Perseverance).


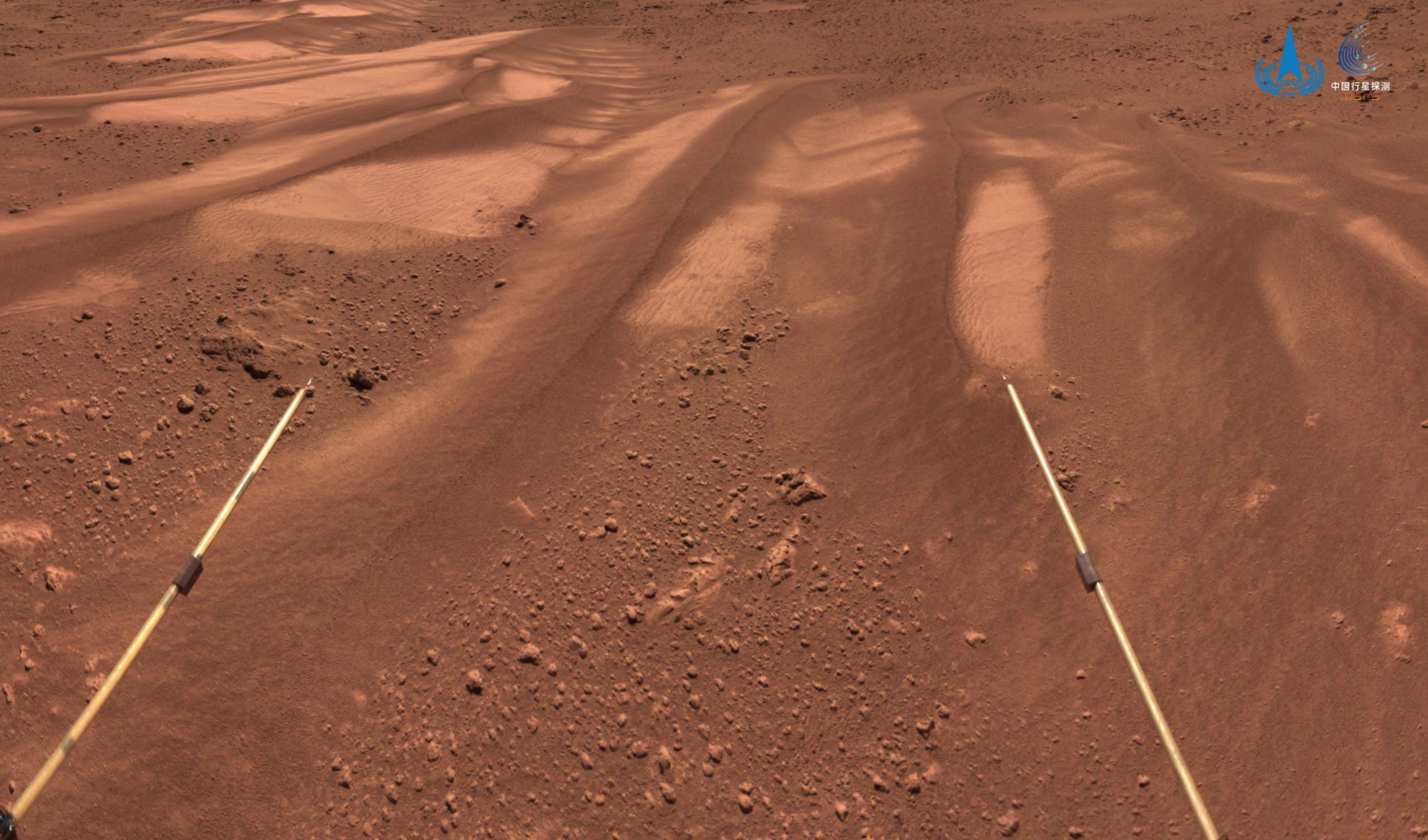
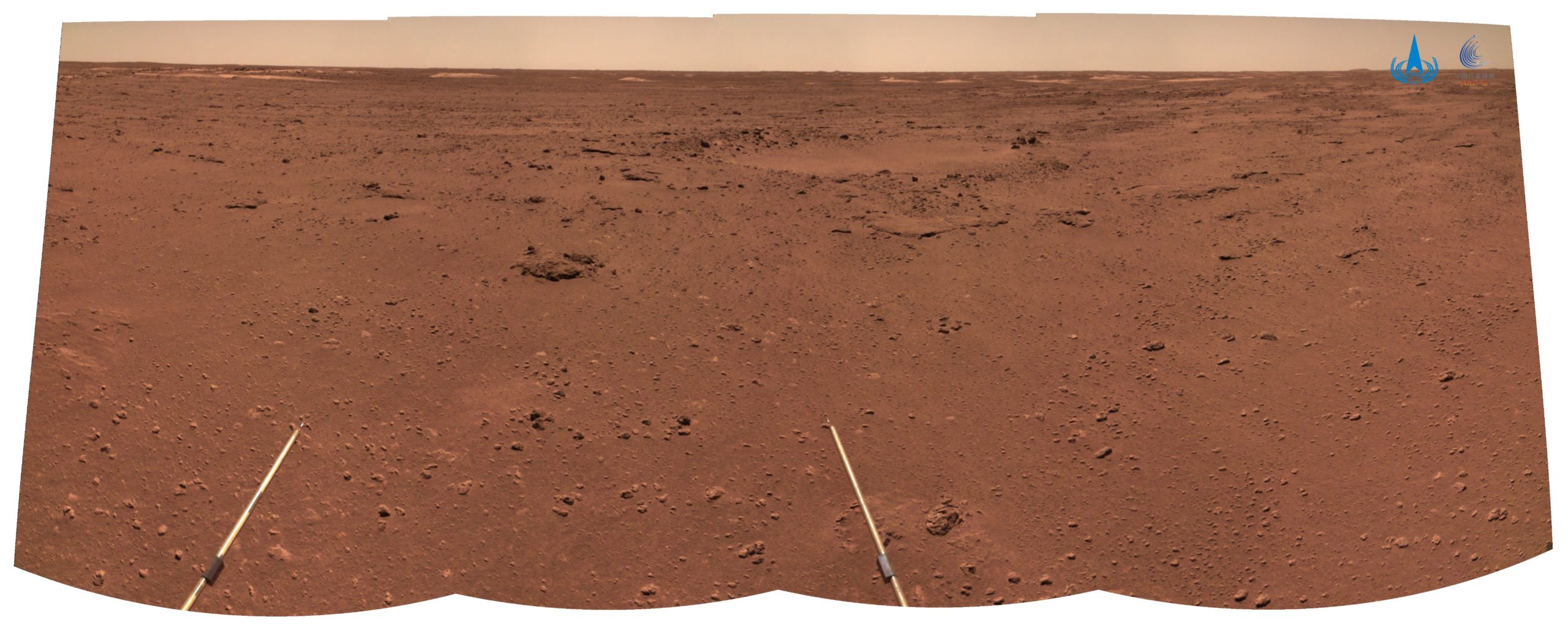
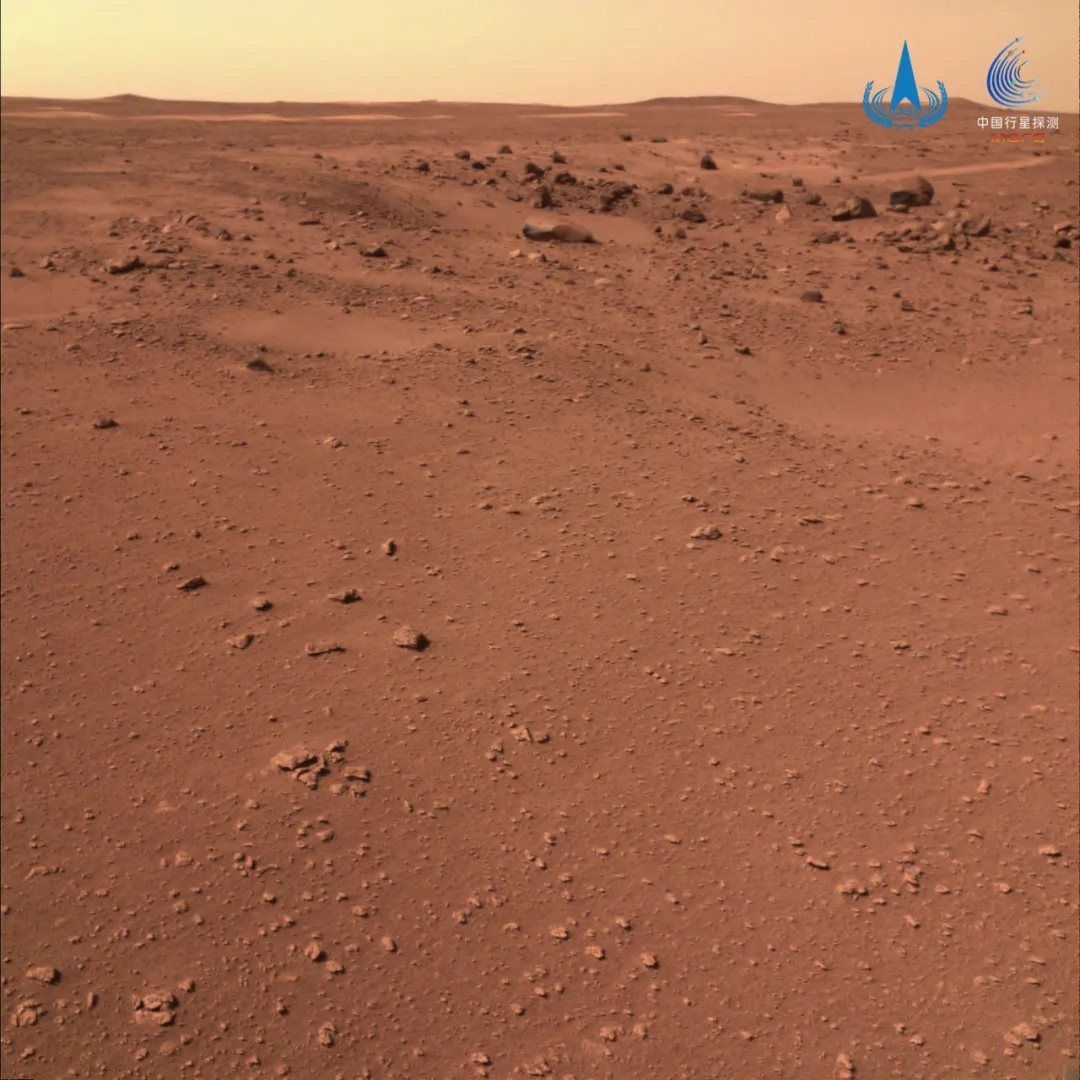
A comienzos de julio Zhurong pasó junto a su escudo térmico trasero y el paracaídas rumbo al sur de Utopia Planitia. En agosto Zhurong superó los 90 días de su misión científica primaria y para el sol 100 —el 23 de agosto— el rover ya había superado el kilómetros sobre la superficie, enviando más de 10 GB de datos. A principios de septiembre las comunicaciones entre la Tierra y Zhurong y el orbitador Tianwen 1 se suspendieron por la conjunción solar —es decir, que visto desde la Tierra Marte estaba muy cerca del Sol—, unas comunicaciones que no se reanudarían hasta cincuenta días más tarde, el 21 de octubre. El rover continuó si trayecto hacia el sur y después de 348 soles ya había recorrido 1921 metros. A raíz de los datos recabados por Zhurong, se han publicado varios artículos científicos en revistas internacionales. La zona de aterrizaje destaca por las pocas rocas de gran tamaño y la presencia de numerosas dunas de arena. El suelo parece ser similar al duricrust al encontrado por la sonda Viking 1 y hay signos de la presencia de minerales hidratados, aunque, por ahora, no se ha observado ninguna prueba concluyente de masas de agua líquida en el pasado.








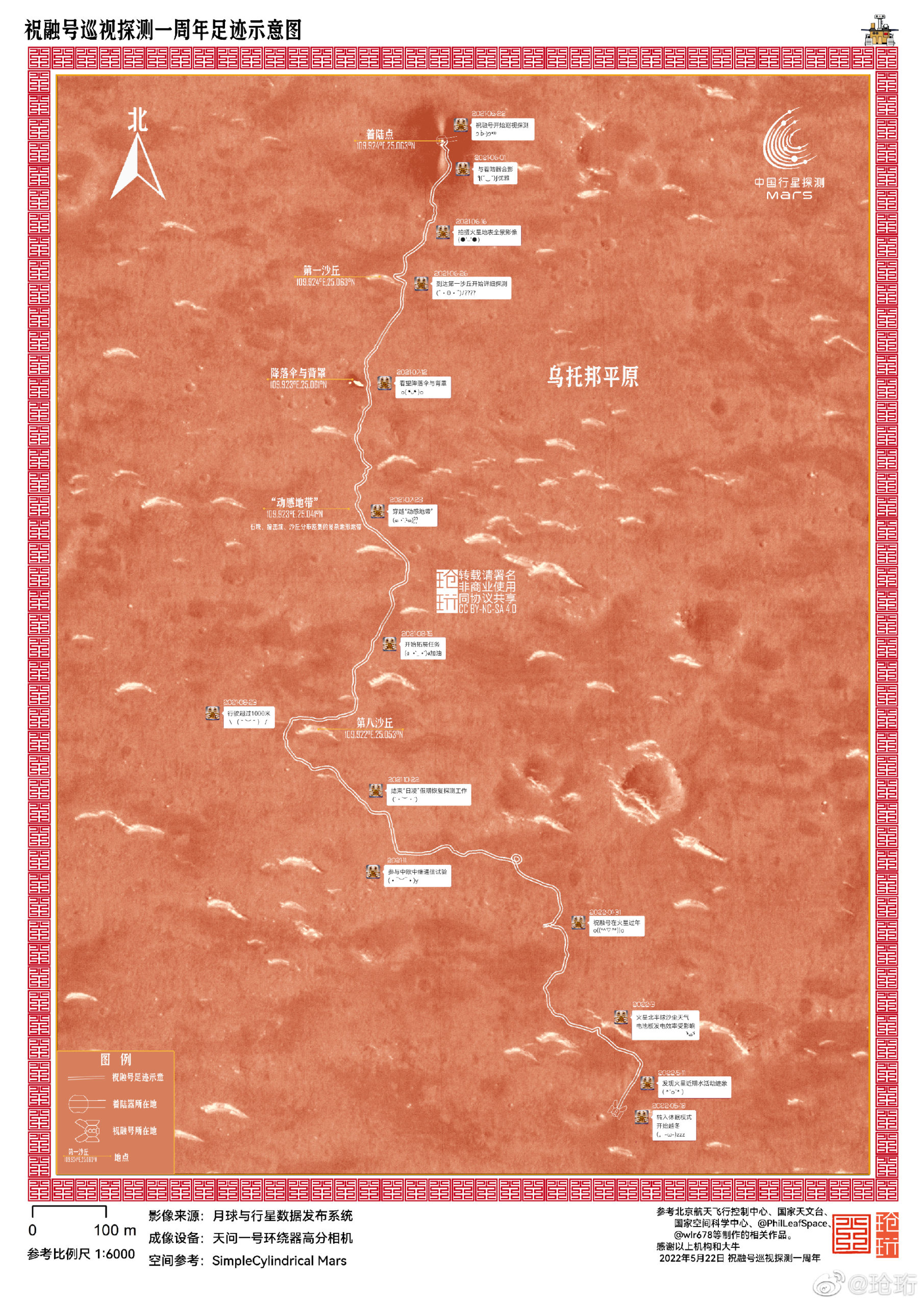
Ahora Zhurong se enfrenta al invierno local. Las temperaturas máximas han descendido por debajo de los -20 ºC y las mínimas nocturnas ya están por debajo de los -100 ºC. Por si fuera poco, la zona de aterrizaje ha sufrido el efecto de una pequeña tormenta de polvo, reduciendo la generación de energía de los paneles solares. Por este motivo, el equipo de Zhurong tomó la decisión de hacer hibernar el rover desde el pasado 18 de mayo de 2022. Como hemos visto, es la segunda hibernación que sufre Zhurong, aunque esta será mucho más prolongada y se extenderá hasta diciembre, cuando dé comienzo la primavera local. Esta decisión pone de manifiesto las limitaciones del sistema de control de temperatura de Zhurong, que se basa en la transición de fase de un hidrocarburo (undecano). El calor del Sol hace que el undecano pase a fase líquida, acumulando energía para calentar el resto del rover durante la noche marciana. Zhurong es el primer rover que no lleva calefactores RHU con plutonio-238, pero es evidente que, aunque ingenioso —nunca se había empleado antes un sistema similar—, los calefactores de undecano no son comparables a los RHU. En cualquier caso, los rovers de la NASA Spirit y Opportunity, que también dependían de la energía solar, pasaron durante varios periodos de hibernación a lo largo de su misión. Nos vemos en diciembre, Zhurong. Dulces sueños marcianos.




Referencias:
- https://www.science.org/doi/10.1126/sciadv.abn855
- https://spj.sciencemag.org/journals/space/2021/9846185/
- https://www.nature.com/articles/s41550-021-01519-5
- https://www.nature.com/articles/d41586-021-03554-8
- https://www.mdpi.com/2072-4292/13/17/3439
- https://assets.researchsquare.com/files/rs-836162/v1_covered.pdf?c=1632507046
- https://moon.bao.ac.cn/web/zhmanager/noticelist?detailId=790430
- https://link.springer.com/journal/42064/volumes-and-issues/6-1
¡Excelentísimo como siempre! Pero de verdad, no de título 😉
Tengo una pregunta para el que sepa. ¿Es la estructura de las «alas» y la tapa del propio rover que forman el conjunto de paneles solares de tipo panal? Es que en la primera foto y en otras fotos parecen ser de ese tipo de material. Seguro que se trata de un material super high-tech y la h*st*a de resistente pero a mi se me antoja extraordinariamente «barato». A ver, me refiero a que parece comprado en el Lerua Perlin de la esquina del polígono. En este caso sería x 8 el mérito de los ingenieros de esta misión!
Gracias por este artículo monumental.
Veinte grados bajo cero de máxima, en una latitud tropical y aún no ha llegado el invierno. ¡La leche! Como para irse a vivir allí, ¡ja!
La solución del acumulador de calor me parece muy buena, pero con la poca masa que podemos llevar a Marte solo da para pasar las noches, y eso si eres un pequeño robot que lo aguanta casi todo.
Quizá algún día muy muy lejano los robots terrestres lleven una pequeña excavadora con la que construirse un refugio subterráneo calentito para que ellos pasen el invierno.
Uuuuh ? Quizás no hará falta cavar… ?
Si encuentran las puertas esculpidas un poco mayores:
https://mars.nasa.gov/resources/26754/door-shaped-fracture-spotted-by-curiosity-at-east-cliffs/
?
天问一号