

La sonda InSight de la NASA para el estudio de Marte nació como una misión inusual. A diferencia del resto de sondas marcianas, InSight no fue seleccionada dentro del marco del Programa de Exploración de Marte (MEP), sino que fue elegida como una misión de tipo Discovery. La segunda particularidad es que, aunque se trata de una misión estadounidense, todos los instrumentos principales son extranjeros (una forma de outsourcing científico encubierto para ahorrar costes). Los instrumentos principales son el sismómetro francés SEIS —la razón de ser de la misión— y el instrumento alemán HP3. SEIS (Seismic Experiment for Interior Structure) protagonizó una chapuza mayúscula antes del lanzamiento que casi da al traste con la misión. El sismómetro incluye tres sensores VBB (Very Broad Band) y tres SP (Short Period). Los tres sensores ultrasensibles VBB están situados dentro de una esfera de titanio al vacío, pero en 2016, a pocos meses del lanzamiento, se comprobó que la esfera no era estanca (se detectaron cuatro fugas), porque los sellos no habían sido diseñados para aguantar las gélidas temperaturas de la noche marciana.

El problema con SEIS obligó a posponer el lanzamiento de la misión de 2016 a 2018 con el fin de reconstruir el instrumento y, lo más importante, provocó que su coste se disparase hasta tal punto que la NASA sopesó seriamente su cancelación. Finalmente, la factura de InSight alcanzaría los 814 millones de dólares, un récord para una misión de tipo Discovery y, por tanto, supuestamente de bajo coste. Pese a su aparente sencillez, InSight siempre fue una misión muy arriesgada. Los dos instrumentos principales, SEIS y HP3, debían ser desplegados en la superficie mediante el brazo robot en una serie de maniobras muy delicadas. Cualquier problema con este brazo o con el terreno circundante y la misión se iría al garete. Afortunadamente, el 26 de noviembre de 2018 InSight aterrizó con éxito en Elysium Planitia y el 19 de diciembre el brazo robot desplegó el sismómetro SEIS en la superficie. El 2 de febrero también logró colocar la cubierta WTS (Wind and Thermal Shield) sobre SEIS, un elemento crítico para lograr la sensibilidad requerida.

El objetivo de SEIS es detectar terremotos marcianos para deducir así la estructura interior de Marte. SEIS ya ha detectado sus primeros aremotos, pero hay un inconveniente. Al no disponer de una red de sismómetros como en la Tierra, los datos de InSight pueden ser interpretados de varias formas dependiendo de los modelos sobre las características del interior del planeta rojo que hayamos seleccionado previamente. Y para reducir el número de modelos InSight lleva otro instrumento, el HP3. El HP3 (Heat Flow and Physical Properties Probe) es un experimento dirigido por el DLR alemán que debe medir el gradiente de temperaturas de los primeros metros del interior del suelo marciano para estimar el flujo medio de temperatura del planeta (con un error de tan solo cinco milivatios por metro cuadrado). De esta forma será posible descartar numerosos modelos del interior planetario compatibles con los datos de SEIS para quedarnos con unos pocos. Evidentemente, cuanto mayor sea el flujo, mayor será la temperatura del interior del planeta. Esto dependerá del tamaño de las distintas capas —núcleo, manto y corteza— y de su composición. Como SEIS debe aportar datos sobre el primer factor, HP3 nos permitirá afinar las hipótesis sobre el segundo, o sea, la composición del interior marciano (por ejemplo, la cantidad de isótopos radiactivos que hay en el núcleo).
La mayor parte de modelos actuales predice que el flujo medio de calor de Marte debe ser del orden de 25-35 milivatios por metro cuadrado, pero hay algunos que sugieren que esta magnitud podría alcanzar los 50 milivatios por metro cuadrado (por comparación, el flujo medio de la Tierra es de 95 milivatios por metro cuadrado). Hasta ahora, el único cuerpo del sistema solar, además de la Tierra, en el que se ha medido el flujo de calor de forma directa es la Luna. Los astronautas de los Apolo 15, 16 y 17 introdujeron a mano en el regolito —con bastante dificultad— sensores para medir este flujo hasta alcanzar una profundidad de 1,38 metros en el Apolo 15 y 2,34 metros en el Apolo 17 (en el Apolo 16 se alcanzaron más de 2 metros de profundidad, pero, de forma inadvertida, John Young arrancó el cable de conexión del instrumento con los pies y lo dejó inservible).
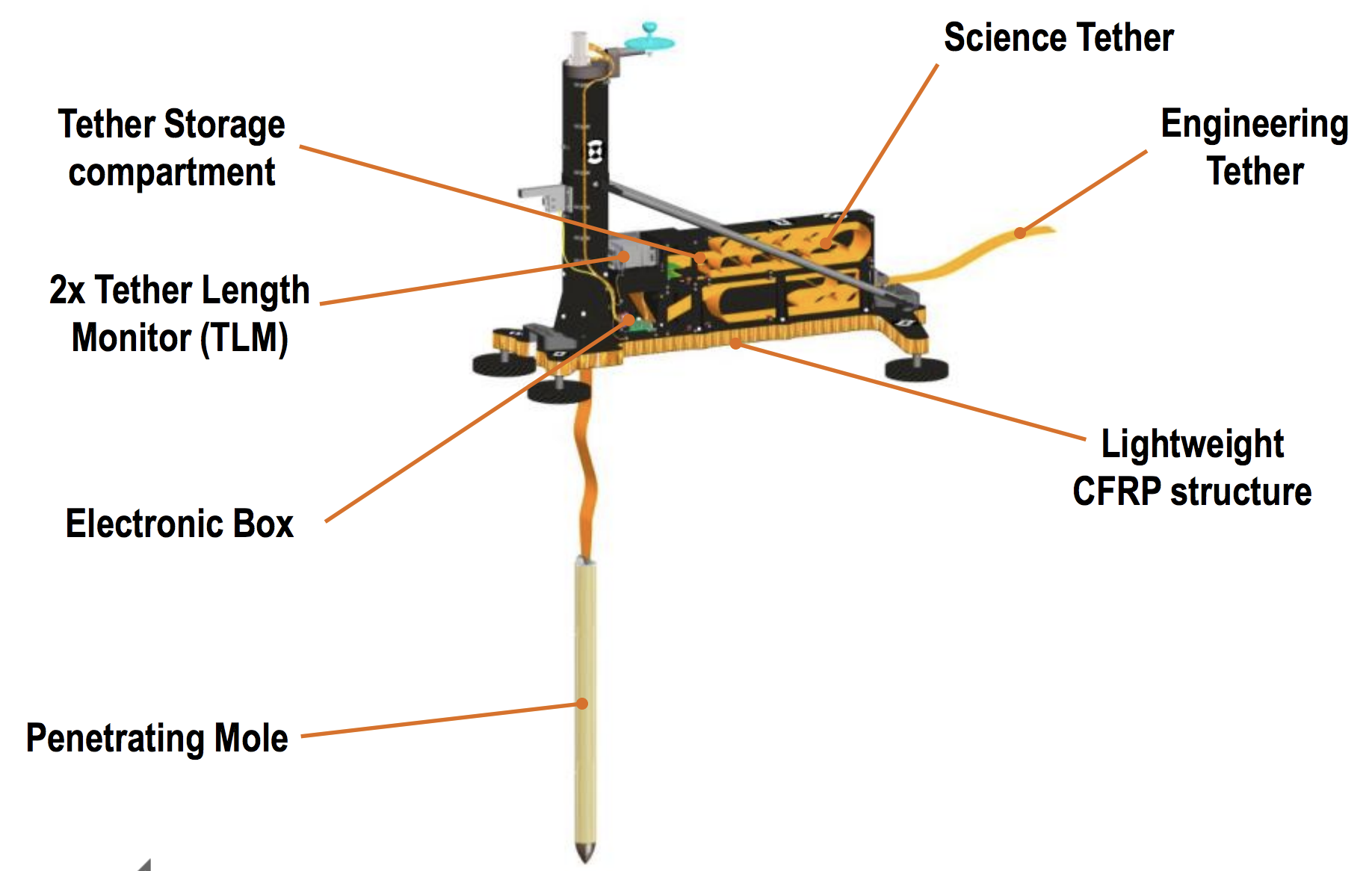

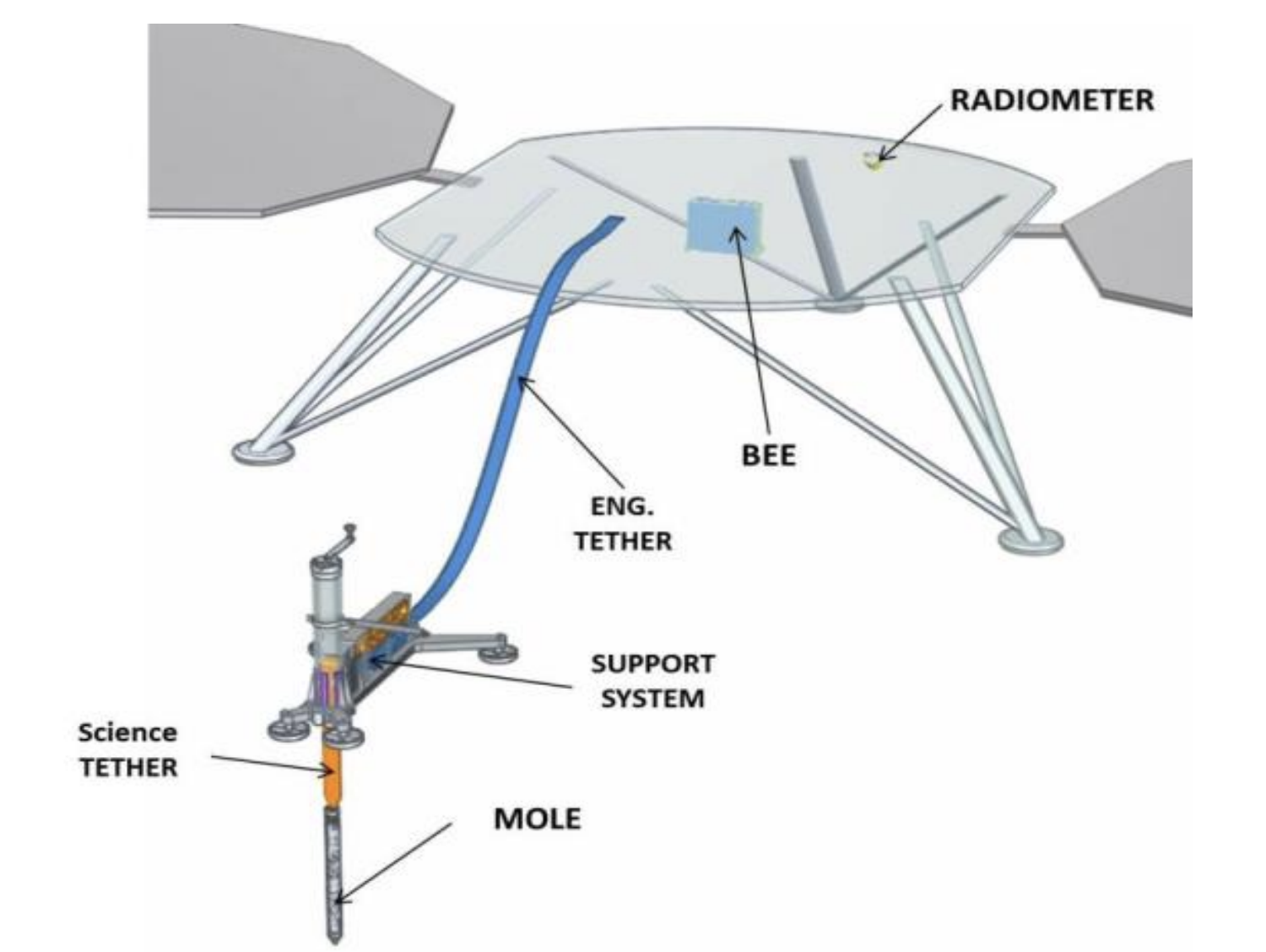
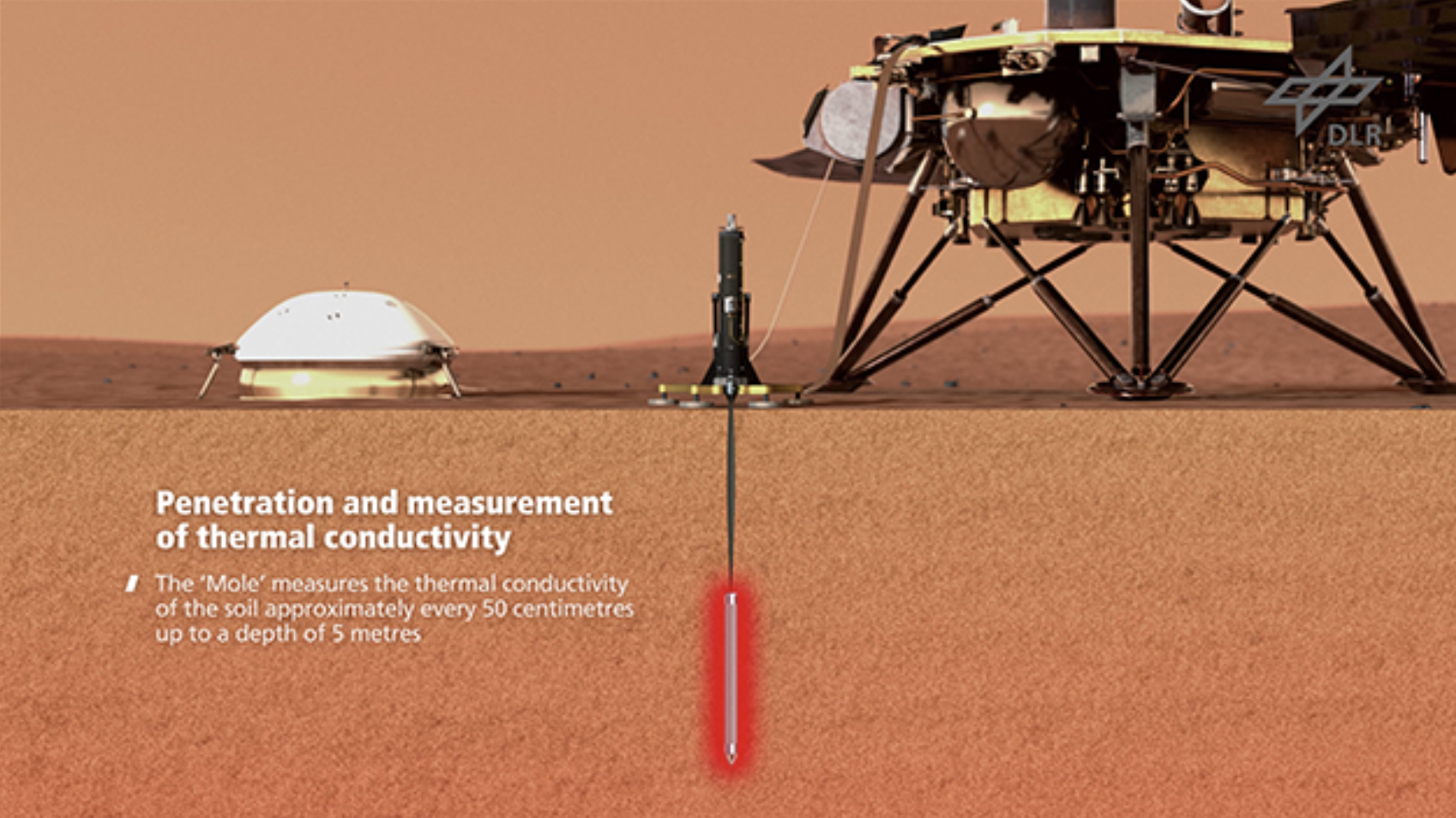
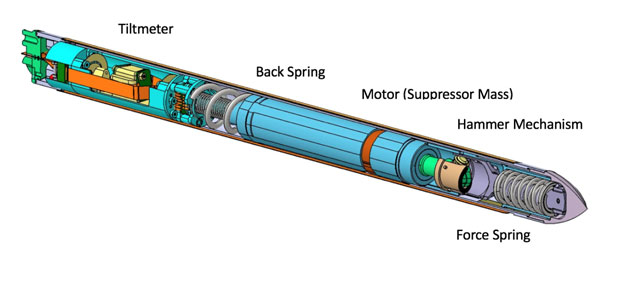
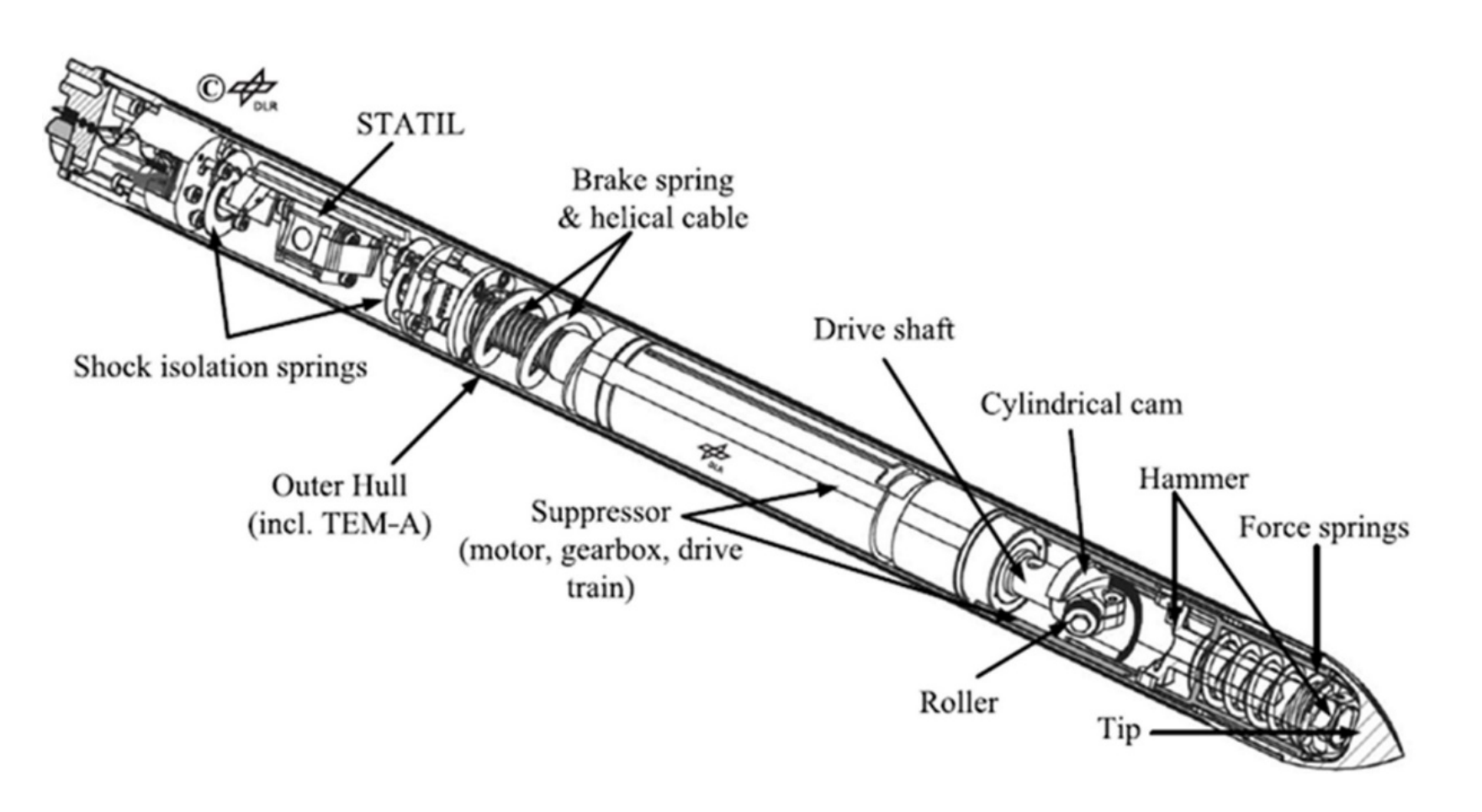
Para lograr su objetivo, HP3 debía ser colocado sobre la superficie de Marte y luego desplegar una cabeza o «Topo» con el fin de excavar hasta los cinco metros de profundidad. El «Topo» es una sonda de 40 centímetros de longitud y 2,7 de diámetro que se introduce en el regolito marciano mediante golpes repetidos y deja tras de sí un cable conectado con el resto del instrumento. El origen del diseño del Topo es fascinante. Originalmente fue concebido por el instituto VINitTransmash de Rusia en los años 90 y luego fue perfeccionado por el DLR alemán de cara a la malograda misión británica Beagle 2 que viajó a bordo de la sonda europea Mars Express. El Topo del HP3 de InSight es una variación de este diseño al que se le ha añadido un mecanismo percutor electromagnético originalmente desarrollado en Polonia por CBK y Astronica para el taladro MUPUS de la sonda Philae que aterrizó accidentadamente en la superficie del cometa 67P/Churyumov-Gerasimenko.

El cable, denominado formalmente como TEM-P (Thermal Excitation and Measurement-Passive) está dotado de catorce sensores PT100 con resistencias de platino para medir la temperatura con un error de 6,5 milikelvin (!). Aunque la longitud del cable es de cinco metros, los investigadores del DLR consideraban que la profundidad mínima para alcanzar los objetivos de la misión sería de tres metros. La excavación del «topo» se produciría en intervalos de tiempo en los que excavaría medio metro de profundidad, seguidos por periodos de enfriamiento de dos días para evitar que el calor generado durante la perforación confundiese a los sensores. A continuación se debían medir las temperaturas del suelo marciano durante un día. Este ciclo se repetiría hasta que el cable alcanzase su longitud máxima o no pudiese avanzar más.

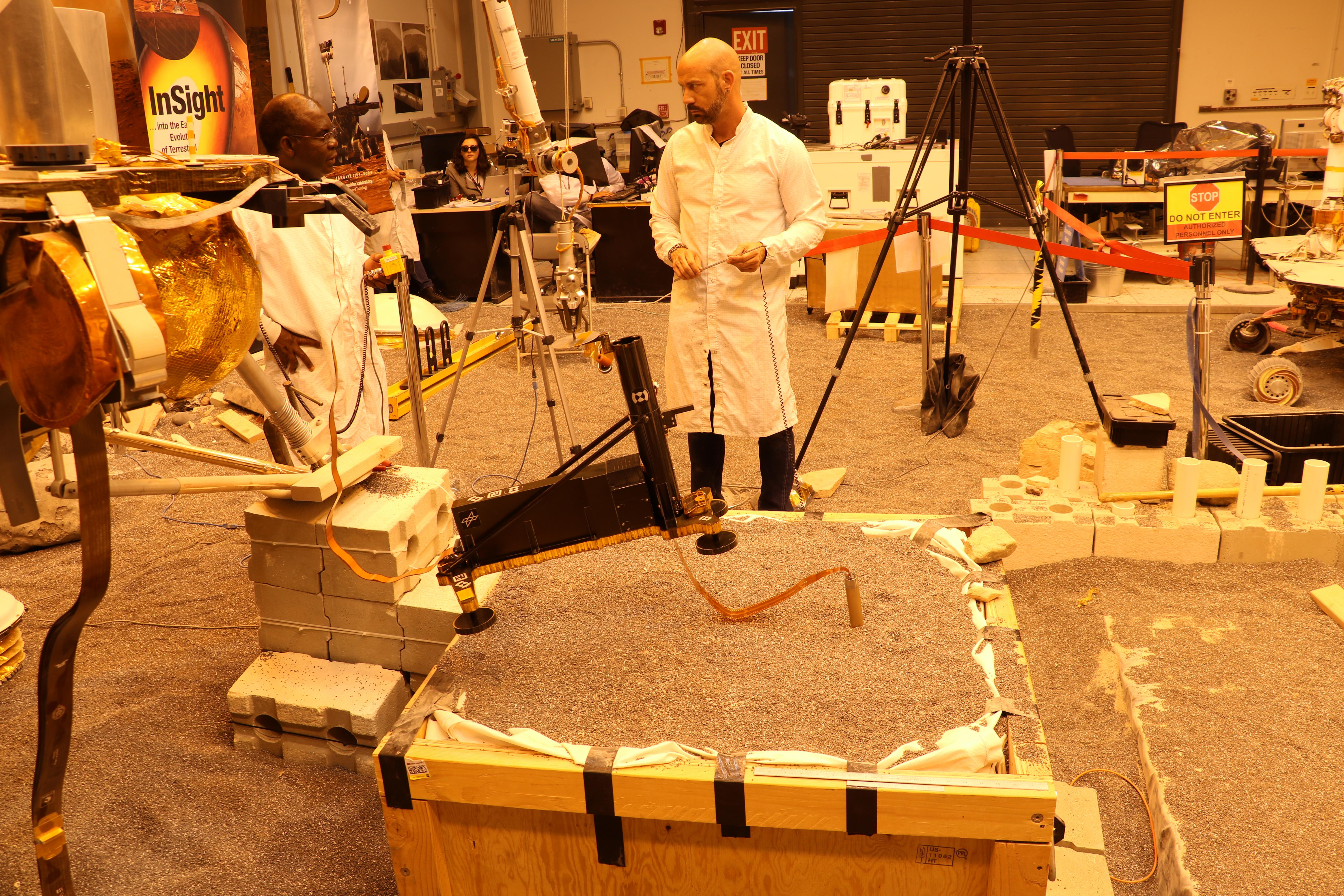
El instrumento HP3 fue colocado sobre la superficie marciana el 12 de febrero de 2019 (en el sol 76 de la misión). Una vez liberado el Topo el 24 de febrero, cuatro días más tarde comenzó la primera maniobra de perforación a las 10:00 hora local del lugar de aterrizaje (hora solar) con el objetivo de alcanzar 70 centímetros de profundidad. Durante el sol 92 el Topo excavó durante cuatro horas, pero se detuvo a una profundidad estimada de entre 28 y 32 centímetros (la profundidad precisa era muy difícil de determinar). Los primeros 18 centímetros se excavaron en apenas cinco minutos con un ángulo de inclinación de unos 15º. Como el Topo tiene una longitud de 40 centímetros, eso significa que se quedó parcialmente enterrado.


Los intentos posteriores por liberar el Topo fueron infructuosos, aunque al menos el radiómetro situado en el Topo logró mandar datos sobre la temperatura del suelo marciano y fue capaz de detectar el bajón de temperatura debido al paso de la sombra de Fobos durante los eclipses. El 25 de marzo el equipo del HP3 realizó una prueba adicional de martilleo del Topo para comprobar las características de los alrededores de la sonda y estudiar la naturaleza del problema. De paso, se determinó que el Topo se había quedado atascado a 30 centímetros de profundidad. ¿Qué le había pasado al topo? Las opciones que barajaban los investigadores del DLR eran tres. La primera, y la más obvia, es que el Topo hubiese chocado con una roca. El equipo del HP3 había diseñado el Topo para lidiar con rocas de al menos 10 centímetros de diámetro. Si se había quedado atascado por una roca, eso significaba que la piedra debía ser más grande. No obstante, la zona de despliegue del HP3 había sido elegida precisamente porque se creía que la cantidad de rocas grandes en el subsuelo debía ser muy pequeña, así que, si se confirmaba esta hipótesis el equipo habría tenido muy mala suerte. Las otras dos hipótesis para explicar el problema con el Topo eran que, por un lado, el cable se hubiese quedado enganchado o que el suelo era muy fino y presentaba una fricción inusitadamente alta al comprimirse por el mecanismo percutor del Topo (algo que ya pasó en las misiones Apolo).

Para salir de dudas, los investigadores tomaron la arriesgada decisión de levantar el instrumento (la parte superior se denimina SSA) unos 52 centímetros y moverlo 20 centímetros en dirección hacia InSight para ver directamente al Topo y su agujero. La maniobra se efectuó en tres pasos durante tres días marcianos y se completó el pasado 28 de junio. La razón de hacerlo por partes es que si, efectivamente, el cable estaba atascado, había que evitar el riesgo de que se rompiese al elevarlo bruscamente. Por fin, los investigadores han podido ver el agujero del Topo. Para su sorpresa, el agujero tiene un diámetro de unos 7 centímetros aproximadamente el doble del diámetro del Topo. Esto significa que el Topo se ha estado moviendo lateralmente ante la imposibilidad de seguir hacia abajo.
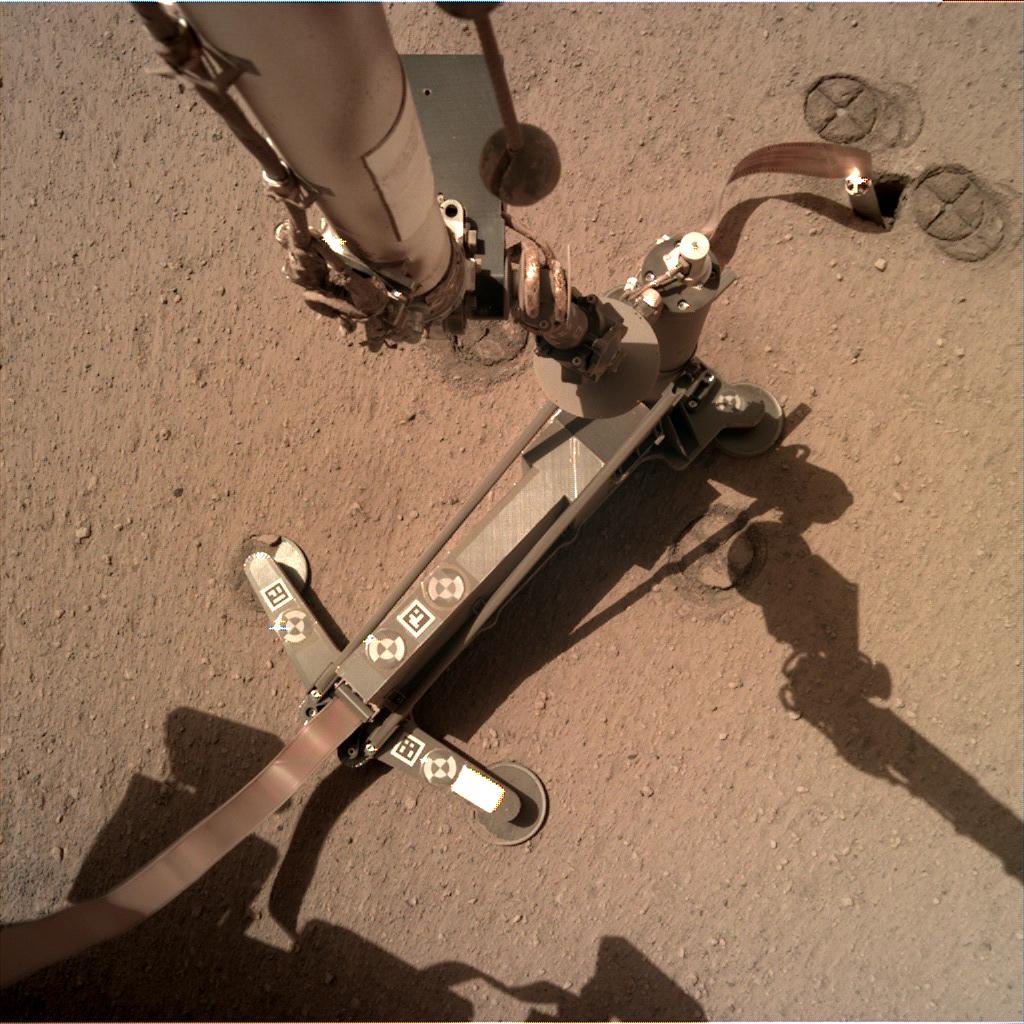


A la vista de las imágenes, el equipo considera que, contra todo pronóstico, el Topo no se ha encontrado con una piedra, sino que estamos ante un problema de fricción del suelo, más o menos parecido al experimentado por los astronautas de las misiones Apolo. No se puede descartar totalmente que, además, haya una roca bloqueando el paso, pero eso significaría que el Topo se ha encontrado con dos problemas al mismo tiempo: un suelo muy fino y una piedra grande, lo que ya sería un grado de mala suerte nivel gafe. ¿Y ahora? El plan más prometedor consiste en compactar la tierra alrededor del topo usando la pala del brazo robot para permitir que el Topo tenga la ficción necesaria a su alrededor y pueda reanudar la excavación en unos meses. Si realmente hay una piedra, el Topo deberá ser capaz de rodearla una vez vuelva a estar en posición vertical (siempre y cuando no sea muy grande, claro). Por lo tanto, debemos armarnos de paciencia. La experiencia con el HP3 demuestra que, a pesar de ser un destino relativamente estudiado, Marte todavía nos guarda muchas sorpresas desagradables que son difíciles de solventar a millones de kilómetros de distancia.

Queridos todos: por favor alguien me ayude a entender!… (Disculpen de antemano mi dificultades cognitivas!…)
Hay dos frases (con sus lógicas) que me hace cortocircuito en la neurona:
frase 1: «…enganchado o que EL SUELO ERA MUY FINO Y PRESENTABA UN FRICCIÓN INUSITADAMENTE ALTA AL COMPRIMIRSE por el mecanismo percutor del Topo (algo que ya pasó en las misiones Apolo).
frase 2: «…El plan más prometedor consiste en COMPACTAR LA TIERRA ALREDEDOR del topo usando la pala del brazo robot para permitir que el Topo tenga LA FRICCIÓN NECESARIA a su alrededor y pueda reanudar la excavación en unos meses.
Cómo es? La fricción alta complica las cosas como en las misiones Apolo?… o Queremos aumentar la fricción para que sea la necesaria para reanudar la excavación?
No hay aquí 2 lógicas contradictorias? Estoy necesitando alguna pastilla para el Alzheimer o algo asi?
Alguien por favor me aclare mi oscuridad! Alguien me ayude un poco con este problema por favor!!!
Chasgracias a todos!
Suena raro, pero es así. El suelo fino se compacta más que el suelo con partículas más gruesas y resulta más complicado excavar en él. Además, el problema del Topo es que no había salido por completo de su contenedor.