

La sonda InSight de la NASA para el estudio de Marte nació como una misión inusual. A diferencia del resto de sondas marcianas, InSight no fue seleccionada dentro del marco del Programa de Exploración de Marte (MEP), sino que fue elegida como una misión de tipo Discovery. La segunda particularidad es que, aunque se trata de una misión estadounidense, todos los instrumentos principales son extranjeros (una forma de outsourcing científico encubierto para ahorrar costes). Los instrumentos principales son el sismómetro francés SEIS —la razón de ser de la misión— y el instrumento alemán HP3. SEIS (Seismic Experiment for Interior Structure) protagonizó una chapuza mayúscula antes del lanzamiento que casi da al traste con la misión. El sismómetro incluye tres sensores VBB (Very Broad Band) y tres SP (Short Period). Los tres sensores ultrasensibles VBB están situados dentro de una esfera de titanio al vacío, pero en 2016, a pocos meses del lanzamiento, se comprobó que la esfera no era estanca (se detectaron cuatro fugas), porque los sellos no habían sido diseñados para aguantar las gélidas temperaturas de la noche marciana.

El problema con SEIS obligó a posponer el lanzamiento de la misión de 2016 a 2018 con el fin de reconstruir el instrumento y, lo más importante, provocó que su coste se disparase hasta tal punto que la NASA sopesó seriamente su cancelación. Finalmente, la factura de InSight alcanzaría los 814 millones de dólares, un récord para una misión de tipo Discovery y, por tanto, supuestamente de bajo coste. Pese a su aparente sencillez, InSight siempre fue una misión muy arriesgada. Los dos instrumentos principales, SEIS y HP3, debían ser desplegados en la superficie mediante el brazo robot en una serie de maniobras muy delicadas. Cualquier problema con este brazo o con el terreno circundante y la misión se iría al garete. Afortunadamente, el 26 de noviembre de 2018 InSight aterrizó con éxito en Elysium Planitia y el 19 de diciembre el brazo robot desplegó el sismómetro SEIS en la superficie. El 2 de febrero también logró colocar la cubierta WTS (Wind and Thermal Shield) sobre SEIS, un elemento crítico para lograr la sensibilidad requerida.

El objetivo de SEIS es detectar terremotos marcianos para deducir así la estructura interior de Marte. SEIS ya ha detectado sus primeros aremotos, pero hay un inconveniente. Al no disponer de una red de sismómetros como en la Tierra, los datos de InSight pueden ser interpretados de varias formas dependiendo de los modelos sobre las características del interior del planeta rojo que hayamos seleccionado previamente. Y para reducir el número de modelos InSight lleva otro instrumento, el HP3. El HP3 (Heat Flow and Physical Properties Probe) es un experimento dirigido por el DLR alemán que debe medir el gradiente de temperaturas de los primeros metros del interior del suelo marciano para estimar el flujo medio de temperatura del planeta (con un error de tan solo cinco milivatios por metro cuadrado). De esta forma será posible descartar numerosos modelos del interior planetario compatibles con los datos de SEIS para quedarnos con unos pocos. Evidentemente, cuanto mayor sea el flujo, mayor será la temperatura del interior del planeta. Esto dependerá del tamaño de las distintas capas —núcleo, manto y corteza— y de su composición. Como SEIS debe aportar datos sobre el primer factor, HP3 nos permitirá afinar las hipótesis sobre el segundo, o sea, la composición del interior marciano (por ejemplo, la cantidad de isótopos radiactivos que hay en el núcleo).
La mayor parte de modelos actuales predice que el flujo medio de calor de Marte debe ser del orden de 25-35 milivatios por metro cuadrado, pero hay algunos que sugieren que esta magnitud podría alcanzar los 50 milivatios por metro cuadrado (por comparación, el flujo medio de la Tierra es de 95 milivatios por metro cuadrado). Hasta ahora, el único cuerpo del sistema solar, además de la Tierra, en el que se ha medido el flujo de calor de forma directa es la Luna. Los astronautas de los Apolo 15, 16 y 17 introdujeron a mano en el regolito —con bastante dificultad— sensores para medir este flujo hasta alcanzar una profundidad de 1,38 metros en el Apolo 15 y 2,34 metros en el Apolo 17 (en el Apolo 16 se alcanzaron más de 2 metros de profundidad, pero, de forma inadvertida, John Young arrancó el cable de conexión del instrumento con los pies y lo dejó inservible).
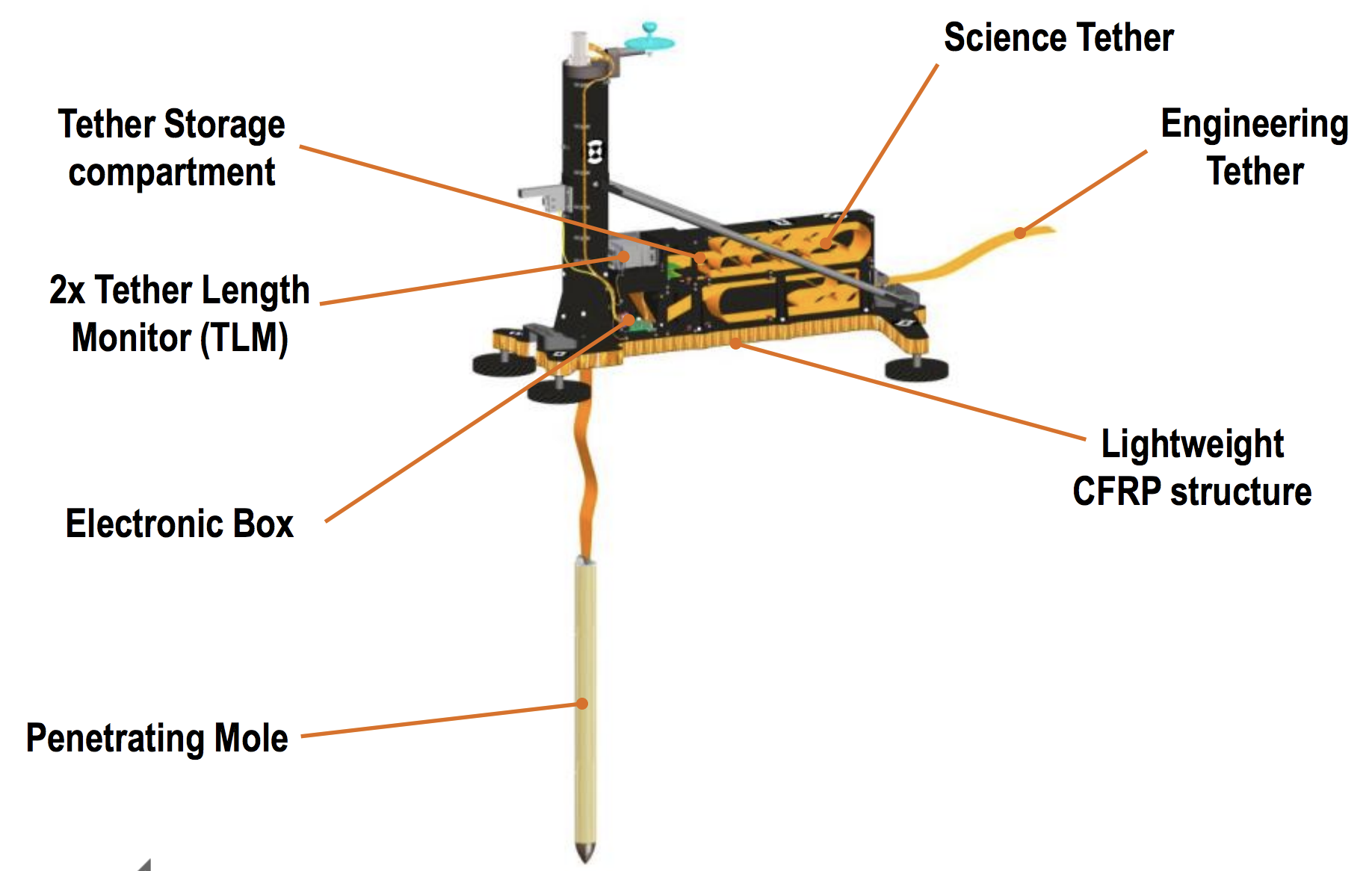

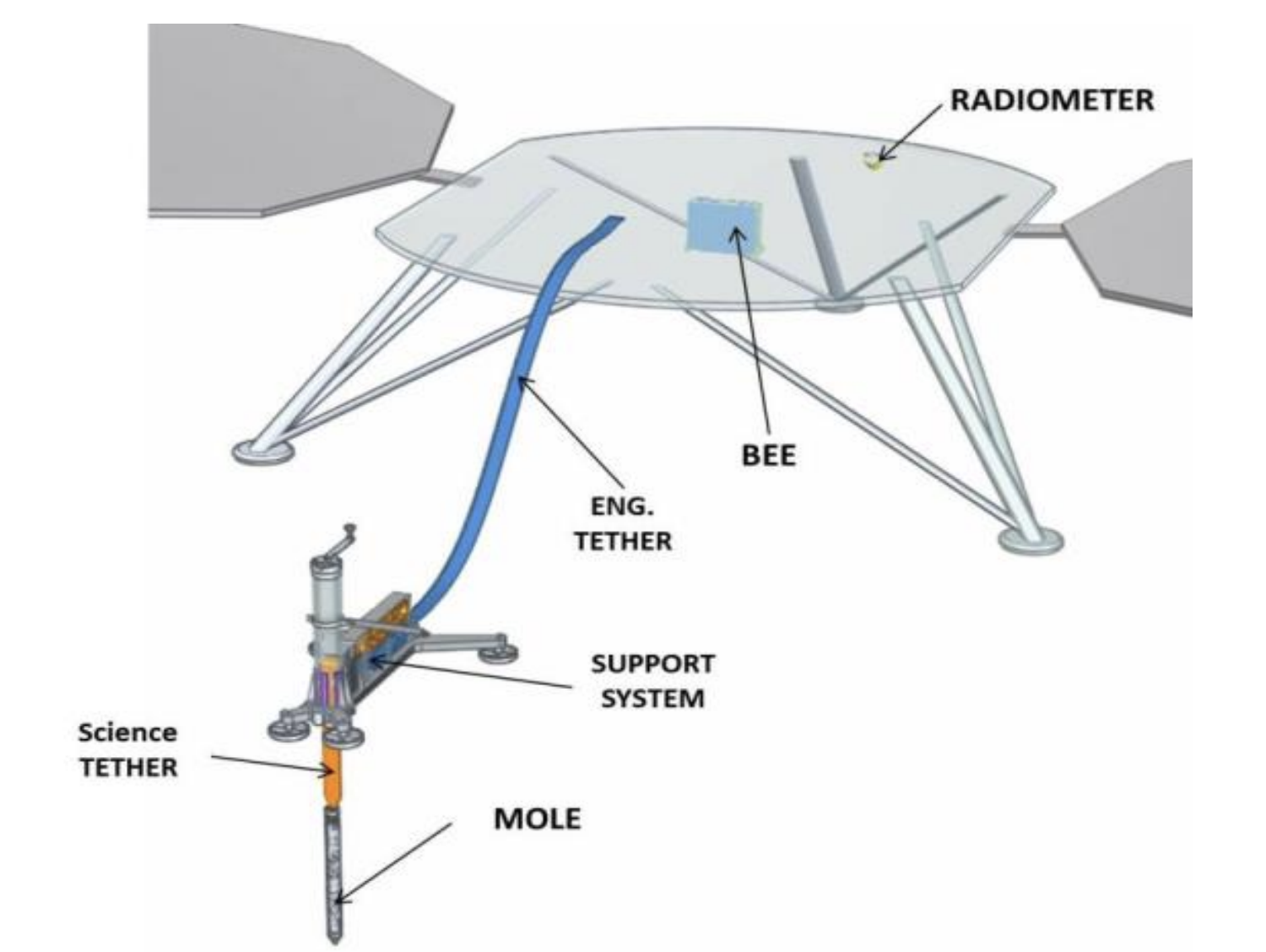
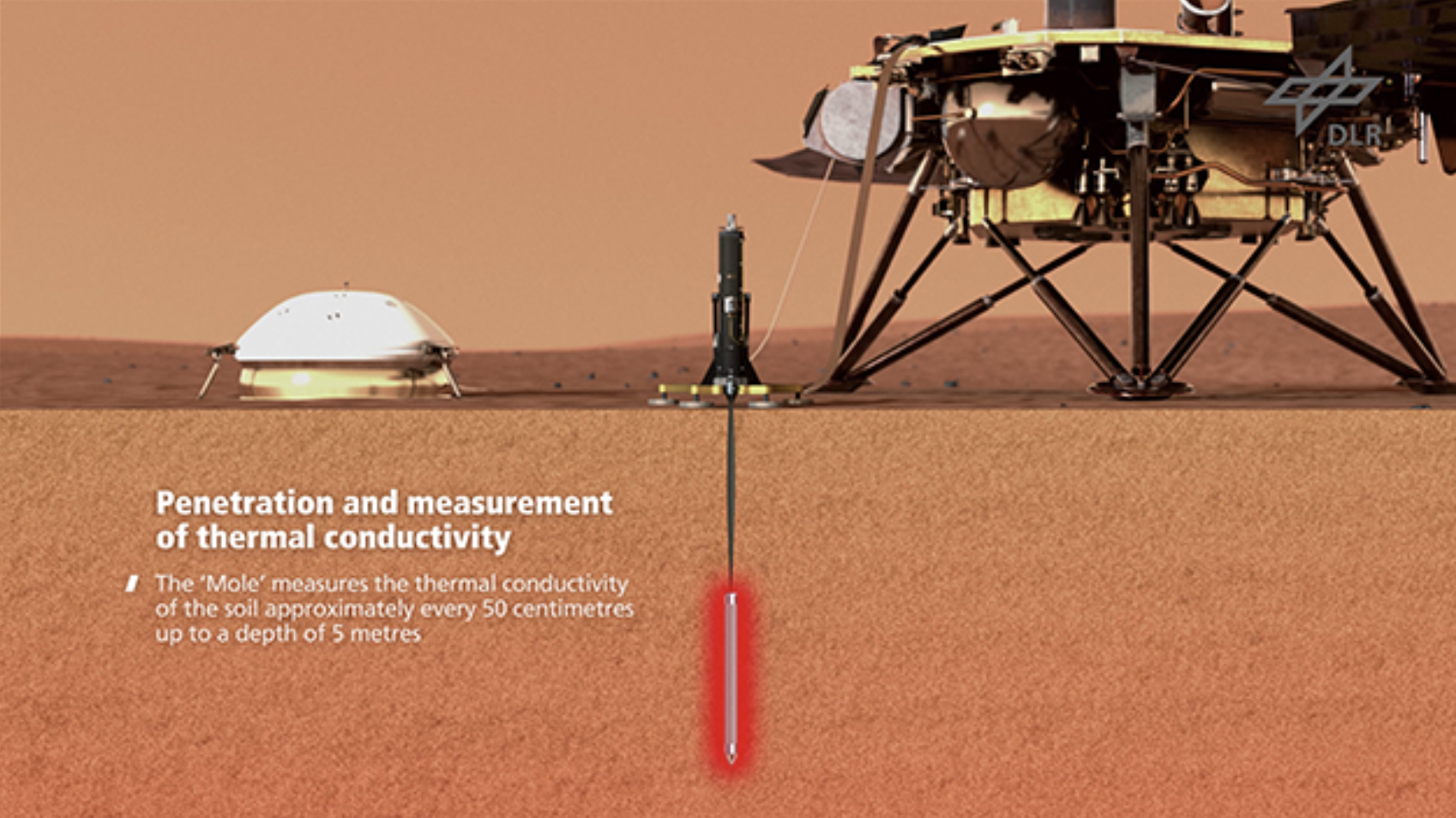
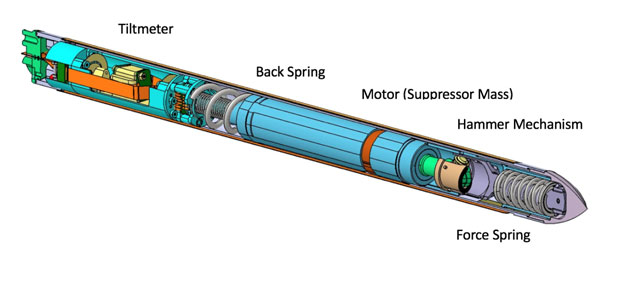
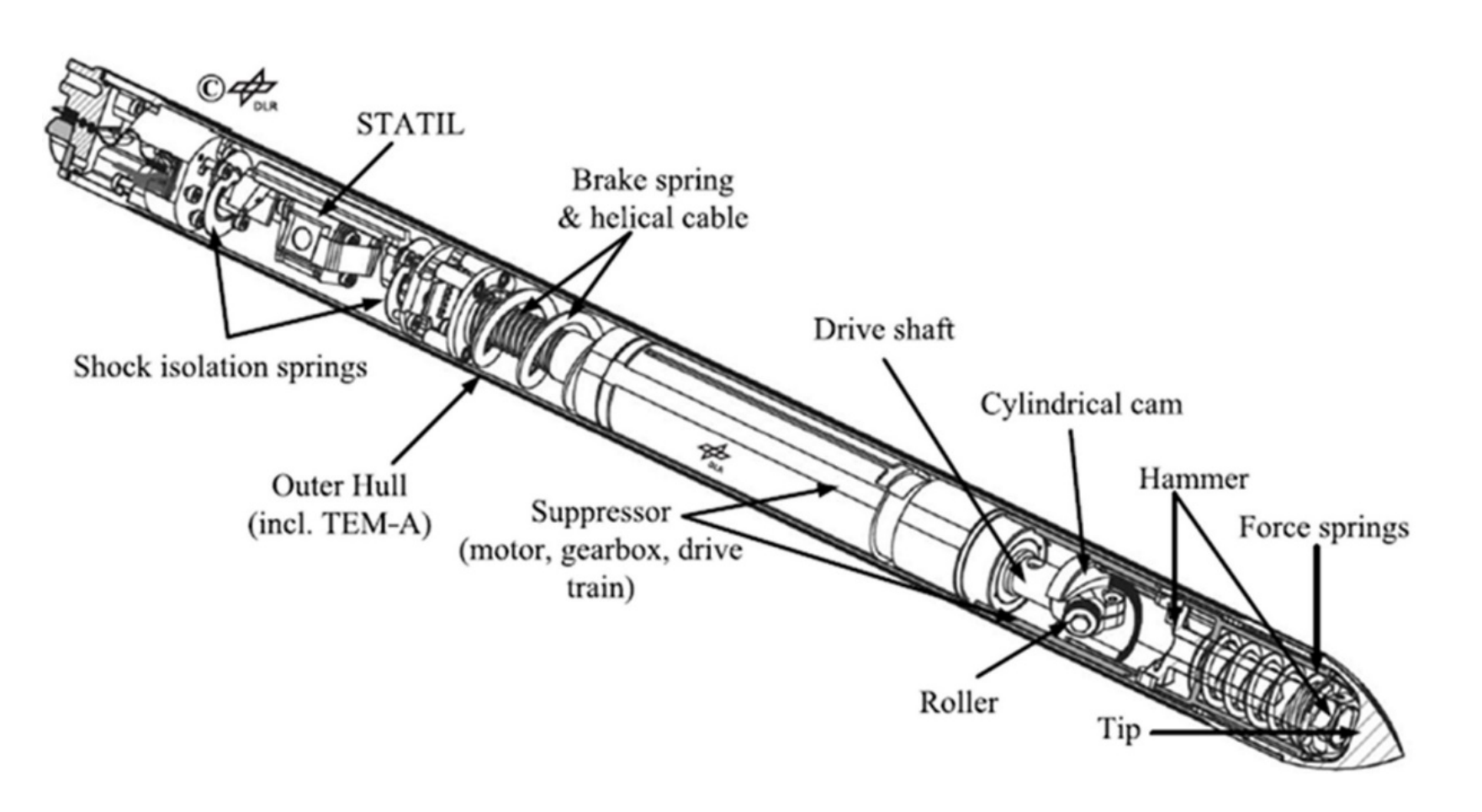
Para lograr su objetivo, HP3 debía ser colocado sobre la superficie de Marte y luego desplegar una cabeza o «Topo» con el fin de excavar hasta los cinco metros de profundidad. El «Topo» es una sonda de 40 centímetros de longitud y 2,7 de diámetro que se introduce en el regolito marciano mediante golpes repetidos y deja tras de sí un cable conectado con el resto del instrumento. El origen del diseño del Topo es fascinante. Originalmente fue concebido por el instituto VINitTransmash de Rusia en los años 90 y luego fue perfeccionado por el DLR alemán de cara a la malograda misión británica Beagle 2 que viajó a bordo de la sonda europea Mars Express. El Topo del HP3 de InSight es una variación de este diseño al que se le ha añadido un mecanismo percutor electromagnético originalmente desarrollado en Polonia por CBK y Astronica para el taladro MUPUS de la sonda Philae que aterrizó accidentadamente en la superficie del cometa 67P/Churyumov-Gerasimenko.

El cable, denominado formalmente como TEM-P (Thermal Excitation and Measurement-Passive) está dotado de catorce sensores PT100 con resistencias de platino para medir la temperatura con un error de 6,5 milikelvin (!). Aunque la longitud del cable es de cinco metros, los investigadores del DLR consideraban que la profundidad mínima para alcanzar los objetivos de la misión sería de tres metros. La excavación del «topo» se produciría en intervalos de tiempo en los que excavaría medio metro de profundidad, seguidos por periodos de enfriamiento de dos días para evitar que el calor generado durante la perforación confundiese a los sensores. A continuación se debían medir las temperaturas del suelo marciano durante un día. Este ciclo se repetiría hasta que el cable alcanzase su longitud máxima o no pudiese avanzar más.

El instrumento HP3 fue colocado sobre la superficie marciana el 12 de febrero de 2019 (en el sol 76 de la misión). Una vez liberado el Topo el 24 de febrero, cuatro días más tarde comenzó la primera maniobra de perforación a las 10:00 hora local del lugar de aterrizaje (hora solar) con el objetivo de alcanzar 70 centímetros de profundidad. Durante el sol 92 el Topo excavó durante cuatro horas, pero se detuvo a una profundidad estimada de entre 28 y 32 centímetros (la profundidad precisa era muy difícil de determinar). Los primeros 18 centímetros se excavaron en apenas cinco minutos con un ángulo de inclinación de unos 15º. Como el Topo tiene una longitud de 40 centímetros, eso significa que se quedó parcialmente enterrado.


Los intentos posteriores por liberar el Topo fueron infructuosos, aunque al menos el radiómetro situado en el Topo logró mandar datos sobre la temperatura del suelo marciano y fue capaz de detectar el bajón de temperatura debido al paso de la sombra de Fobos durante los eclipses. El 25 de marzo el equipo del HP3 realizó una prueba adicional de martilleo del Topo para comprobar las características de los alrededores de la sonda y estudiar la naturaleza del problema. De paso, se determinó que el Topo se había quedado atascado a 30 centímetros de profundidad. ¿Qué le había pasado al topo? Las opciones que barajaban los investigadores del DLR eran tres. La primera, y la más obvia, es que el Topo hubiese chocado con una roca. El equipo del HP3 había diseñado el Topo para lidiar con rocas de al menos 10 centímetros de diámetro. Si se había quedado atascado por una roca, eso significaba que la piedra debía ser más grande. No obstante, la zona de despliegue del HP3 había sido elegida precisamente porque se creía que la cantidad de rocas grandes en el subsuelo debía ser muy pequeña, así que, si se confirmaba esta hipótesis el equipo habría tenido muy mala suerte. Las otras dos hipótesis para explicar el problema con el Topo eran que, por un lado, el cable se hubiese quedado enganchado o que el suelo era muy fino y presentaba una fricción inusitadamente alta al comprimirse por el mecanismo percutor del Topo (algo que ya pasó en las misiones Apolo).

Para salir de dudas, los investigadores tomaron la arriesgada decisión de levantar el instrumento (la parte superior se denimina SSA) unos 52 centímetros y moverlo 20 centímetros en dirección hacia InSight para ver directamente al Topo y su agujero. La maniobra se efectuó en tres pasos durante tres días marcianos y se completó el pasado 28 de junio. La razón de hacerlo por partes es que si, efectivamente, el cable estaba atascado, había que evitar el riesgo de que se rompiese al elevarlo bruscamente. Por fin, los investigadores han podido ver el agujero del Topo. Para su sorpresa, el agujero tiene un diámetro de unos 7 centímetros aproximadamente el doble del diámetro del Topo. Esto significa que el Topo se ha estado moviendo lateralmente ante la imposibilidad de seguir hacia abajo.
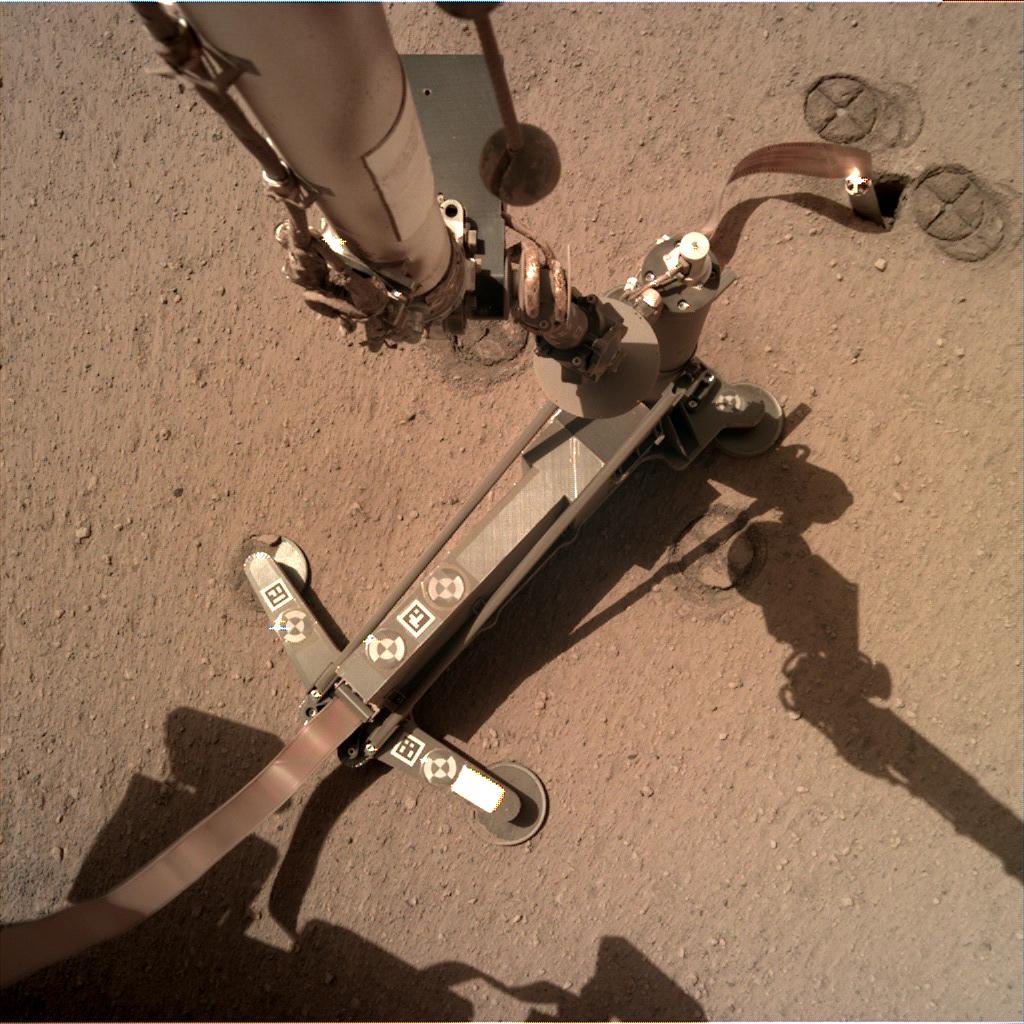


A la vista de las imágenes, el equipo considera que, contra todo pronóstico, el Topo no se ha encontrado con una piedra, sino que estamos ante un problema de fricción del suelo, más o menos parecido al experimentado por los astronautas de las misiones Apolo. No se puede descartar totalmente que, además, haya una roca bloqueando el paso, pero eso significaría que el Topo se ha encontrado con dos problemas al mismo tiempo: un suelo muy fino y una piedra grande, lo que ya sería un grado de mala suerte nivel gafe. ¿Y ahora? El plan más prometedor consiste en compactar la tierra alrededor del topo usando la pala del brazo robot para permitir que el Topo tenga la ficción necesaria a su alrededor y pueda reanudar la excavación en unos meses. Si realmente hay una piedra, el Topo deberá ser capaz de rodearla una vez vuelva a estar en posición vertical (siempre y cuando no sea muy grande, claro). Por lo tanto, debemos armarnos de paciencia. La experiencia con el HP3 demuestra que, a pesar de ser un destino relativamente estudiado, Marte todavía nos guarda muchas sorpresas desagradables que son difíciles de solventar a millones de kilómetros de distancia.

Fascinante…
Una pregunta, Daniel: has dicho que el otro único cuerpo del Sistema Solar en que se ha medido el flujo de calor de forma directa ha sido la Luna… pero al final, con lo de los problemas de la instalación, no has comentado de cuántos milivatios por metro se obtuvieron en esas mediciones. Sólo por curiosidad, para comparar. Gracias.
Sobre el flujo de calor de la Luna: https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/19780005003.pdf
Grax!!
Exelente entrada, es fascinante el día a día de las sondas y Rovers espaciales y como tienen que afrontar sus «pequeños grandes problemas», una lástima que no lleguen al gran público si no encuentran agua…
Afecta todo esto al diseño y/o construcción del taladro en el Rover a bordo de la ExoMars 2020? Se re-rebautizará 2022?
Saludos
El sistema del Rover ExoMars 2020 es totalmente distinto al de Insight. Insight esta compuesto por un topo que va percutiendo el suelo con la ayuda de un cilindro, y Exomars es un taladro instalado en el Rover. El taladro del Exomars, en teoría se diseñó para distintos tipos de suelo. Además tiene varios sistemas de seguridad y una broca de repuesto para cuando se degrade la primera.
Simplemente increíble el nivel de improvisación de la nasa acaso nunca pensaron que podría haber una roca en el camino del taladro ?! hubiera sido mejor una series de sondas como los de la propuesta euro rusa MART NEX Que si nos hubiera- dicho como es el planeta rojo por dentro 😒
Personalmente siempre me ha parecido que un taladro es una de las cosas más complicadas que puede llevar una sonda de aterrizaje: partes móviles, mucha potencia, materiales duros y afilados y, para colmo, la posibilidad de encontrarte con una roca más dura de lo previsto y que todo se vaya al garete. Yo no criticaría mucho a la NASA por este fallo. Saludos.
Gracias mil por tantos y tan excelentes artículos como éste.
Parece que, a pesar de estar preparando los experimentos durante años, es muy difícil lidiar con lo imprevisto. Me recuerda a intentar introducir una sombrilla en la arena de playa, en la zona donde la arena está más suelta.
Quizás sea esta una razón para enviar humanos a Marte, la capacidad que tenemos para adaptarnos a situaciones imprevistas.
(Sugerencia: ¿y por vibración? o ¿imitando los «gusanos marcianos» de alguna película de Sci-Fi)
Pues no se qué decirte, tras leer la anécdota del cable lunar roto por un astronauta…
Para la sombrilla de la playa, https://articulo.mercadolibre.com.ar/MLA-692402784-tornillo-saca-arena-para-sombrilla-de-playa-_JM?quantity=1
El invento del siglo, podría funcionar en Marte?
El viejo y peludo Tornillo de Arquimedes, siglo 3 a.C.
Gracias, gracias, gracias Daniel por tu trabajo cada dia. Mi afición a la exploración del espacio se agrandó con tu blog y el dia que lo descubrí fue un dia para no olvidar.
saludos jorge m.g.
: )
Por cierto el cable lo rompió el comandante del Apollo 16, aquí el video y el enfado que se le escuchó al saber lo que había hecho.
https://www.youtube.com/watch?v=gEEND5cJuRY
Saludos jorge m.g.
¡Cierto!
Hasta las leyendas como John Young pueden cometer errores.
Saludos
Hete aquí la alegoría más clara de la divulgación científica. Todos los twits por todos lados diciendo: «Se atasca la InSight», de la manera más seca y desabrida… en cambio aquí Daniel nos emociona con la historia, el contexto y las condiciones técnicas.
Gracias, Maestro!
He compartido tu pensamiento, mientras leía la entrada del blog.
Oof topic :la NASA acaba de probar el sistema de aborto de la nave Orión con éxito así que estamos más cerca de ver el lanzamiento del SLS el año que viene 😁
Si lo vi esta tarde y pensé lo mismo
La impotencia de no estar alli
Aunque soy un gran defensor de la exploración robótica en nuestro estado de tecnología de propulsión, es EVIDENTE que este problema habría quedado resuelto por un explorador humano en 1 minuto, por torpe que fuera.Es un gran argumento a favor de la exploración planetaria humana.
Yo creo que con un fracción del costo de llevar una persona que, ante un eventualidad moviese adecuadamente el taladro, se podría enviar una sonda con 3 brazos y tres taladros, asegurándose que los brazos pudiesen mover a gusto los taladros.
mmm ñné… no estoy del todo seguro. Como comentan por arriba, un taladro es una de las cosas más complicadas que puede llevar una sonda. Si estuviésemos hablando de una sonda lunar que pueda hacer un par de saltos si tiene mala sierte, bien, pero en Marte, por mucho que tengas 3 brazos y 3 taladros, te hubiese pasado lo mismo
Pues una sonda con herramientas triplicadas no, pero tres sondas como ésta para triangular los movimientos sísmicos sí que habría estado bien.
Hombre, la verdad es que hay que aprender de todo… es la primera vez que se intenta.
Completamente OFF-TOPIC:
Launch of Orion Spacecraft Ascent Abort-2 Test | NASA
https://youtu.be/rJgqhznBntE
Llevaba tiempo esperando este artículo porque no tenía claro lo que estaba ocurriendo
Estas cosas pasan. La ley de Murphy golpea siempre en el momento más inoportuno. Cierto que un humano habría solucionado el problema rápidamente, pero podría incurrir en otro tipo de errores como tal humano que es.
A ver si encuentran una salida porque la encomienda de esta misión es muy interesante para saber cómo es Marte por dentro y si sigue geológicamente «vivo».
Se evidencia que la Ley de Murphy es universal…y no creo que afecte sólo a los humanos…habrá que esperar a verificar esto…
Todo esto se solucionará el día que puedan ir personas a marte (o al menos a su órbita y puedan manejar maquinaria adecuada por telepresencia).
Vamos a ver hombre!.Ya es hora que alguien ponga un poco de cordura en todo esto.Como se pueden gastar tantos millones en enviar una sonda a otro planeta para tratar de excavar su subsuelo?No es mejor utilizar el dinero en cosas nceserarias para el ser humano?.Investigacion para resolver emfermedades,traer agua a zonas que la necesiten,energias alternativas,etc.Gastemos el dinero en beneficio de la humanidad y dejemos tranquilos a los planetas de nuestro entorno.Algo de cordura por favor!!!
El blog sobre estupideces es el del fondo a la derecha.
Gracias.
Y por qué en vez de escribir gilipolleces en un blog serio, no te dedicas a estudiar medicina?? o a practicarla… por ejemplo puede practicar haciéndote un enema.
De cada 1000 euros de presupuesto, nos gastamos 250 en la seguridad social y 0.33 euros en exploración espacial. Podríamos gastarnos esos 0.33 en la seguridad social, pero estaríamos poniendo límites a las capacidades humanas, y a mejoras sociales que se derivan de la investigación espacial y probablemente esos 0.33 euros no marcarían una diferencia en el servicio provisto de cara a las personas.
Aquí el iluminado de turno, menos mal que es el único que tiene cordura en este universo.
Joer, Nepomuceno, creí que era en modo irónico on.
No.
¿Alguna otra pregunta?.
No puedes estar hablando en serio…
La exploración espacial ha hecho avanzar la tecnología de forma decidida.
Si me dices del dinero gastado en armamento, puedo estar de acuerdo en que es un total dislate, pero conocer nuestro entorno, dilucidar si la vida es una casualidad irrepetible o algo habitual (sospechamos que si, pero no tenemos pruebas palpables), conocer el origen de todo lo que somos es casi nuestra obligación como seres intelectivos…
No nos confundamos. La tecnología es nuestra aliada y el conocimiento nos hará mejores, no lo dudes.
Pues imagina por un momento a la reina Isabel diciendo: «Querido Critobal, ¿Como se te ocurre que la Corona malgaste un puñado de pelas en una loca aventura de descubrimiento de nuevas rutas marítimas, sin ninguna garantía de éxito, cuando aquí tenemos tremendo follón con los moros?. Anda, tío, vete a hacer puñetas!!!!.
O que alguien le hubiese dicho a Theodore Maiman «¿Quieres dinero para desarrollar esa gilipollez del LASER? Pues tu estas tonto, ¿para que demonios puede servir esa chorrada?. Vete a inventar algo útil».
Y así podríamos seguir dando miles de ejemplos. Con tu forma de pensar aún seguiríamos columpiándonos en los árboles.
Venga va, Nepo, yo te resumo brevemente, para el caso de que no seas un troll y sí alguien que no tiene ni idea de cómo lo que se hace «ahí arriba» nos beneficia «aquí abajo»:
* La necesidad de reducir el peso y el volumen de los equipos electrónicos abordo de las naves impulsó el desarrollo de los circuitos integrados y los chips. Tecnología que posteriormente supuso una revolución en la Electrónica, las Telecomunicaciones, la Informática y la Robótica.
* La medicina espacial ha ayudado considerablemente al desarrollo de las técnicas de exploración biomédicas como la resonancia magnética, los Tacs, las ecografías, los termómetros digitales, la cirugía láser, las máquinas de diálisis, los audífonos, la telemedicina y un largo etc (sólo por esto debía ser suficiente para responder a tu pregunta, pero sigo por si acaso).
* La Meteorología ha cambiado radicalmente a partir del uso de los satélites meteorológicos y de los grandes superordenadores para todo tipo de modelos estadísticos.
* En Matemáticas se hicieron necesarios grandes avances en el cálculo de las trayectorias y en el desarrollo de modelos numéricos de gran complejidad.
* Mejoras en la tecnología de los alimentos como las comidas liofilizadas, las máquinas de análisis y depuración de aguas y las técnicas de aislamiento térmicos.
* Los satélites han hecho posible las comunicaciones globales, los sistemas de posicionamiento y el seguimiento de los recursos pesqueros, minerales, agrícolas y forestales.
* Aplicaciones médicas como el termómetro por infrarrojos (ese que el pediatra pone en la oreja de los bebés y proporciona su temperatura corporal). O sea, el TERMÓMETRO AURAL (una tecnología de la NASA).
* Almacenamiento de energía lumínica en placas solares (¿o quizás prefieras seguir alumbrándote con velas?).
* Aspiradoras sin cable (sí, de esas que muchos tenemos en casa). Tecnología desarrollada en las misiones Gemini y Apolo de la NASA.
* Desarrollo del polibencimidazol (PBI) el primer polímero resistente a altas temperaturas para las Fuerzas Aéreas estadounidenses allá por la década de los 60, aislante del que se benefician los bomberos de hoy en día para apagar fuegos.
* LEDs para terapia médica: si tienes alguna lesión muscular y el fisioterapeuta te ha aplicado calentamiento mediante infrarrojos o LEDs rojos. Se usan unos diodos que emiten calor tecnología espacial de la NASA.
* Microencapsulación por medio del PRP, o Petroleum Remediation Product, que aprovecha esta tecnología creada por la NASA en los 90, la cual se basa en miles de pequeñas cápsulas de cera de abeja que «cazan» contaminantes como aceite de motor o hidrocarburos del petróleo ayudando a limpiar las aguas. ¿Recuerdas el PRESTIGE?
* Se han descubierto nuevos materiales más resistentes a los cambios de temperatura, más ligeros, más resistentes. Gran desarrollado de la Nanotecnología.
* En 1970 la NASA y Honeywell desarrollaron un detector de humo por ionización, un dispositivo capaz de detectar humo y gases tóxicos en Skylab (la primera estación espacial estadounidense) para el cual se usó el isotopo americio-241. Éste fue el precursor de los detectores habituales que vemos en los techos de viviendas, oficinas…
* Y para que veas la curiosidad, la NASA puntualiza que no inventaron el teflón, el velcro o el Tang. Eso son bulos.
* SÓLO LA NASA TIENE REGISTRADAS MÁS DE 6.000 PATENTES DE APLICACIONES EN EL PLANETA TIERRA. A eso hay que sumar muchas más registradas por las empresas que trabajan para ella y demás agencias espaciales.
Ahora te pregunto: ¿te parece poco?
Muy completo, Fer.
Gracias!
Es dinero gastado en beneficio de la humanidad y es bien poco comparado con otros gastos.
Esa mala escritura ya deja a las claras la credibilidad de la persona que ha escrito el comentario.
Eso dicho, vamos a gastar dinero en por ejemplo traer agua a zonas que la necesiten en vez de ayudar a los países en esa situación para que la desarrollen por sí mismos y dejen de depender por completo del Primer Mundo cómo pasa ahora. Muy buena idea.
Joer, habéis triturado a un «cuñao» de libro y sin que yo sacase la pistola. Muy bien.
No se justifica invertir unos pocos centavos de dolar para mantener tu pobre existencia in-transcendental.
Nos queda el consuelo de pensar que, cuando Nepomuceno muera, el nivel intelectual medio de la humanidad subirá un poco.
Con un zoquete menos, tocará a más inteligencia por barba.
Un astronauta incluso podria hacer alguna reparacion, si, como es de suponer, lleva un taller consigo (mas les vale si viajan a otro planeta).
Hasta que no tengamos robots con una inteligencia similar a la humana, las personas son irremplazables.
La tripulacion humana por un lado, encarece la mision, pero por otro la abarata porque no necesita caras herramientas roboticas que a pesar de su intensivo testeo suelen hallarse con sorpresas tontas pero insuperables por ellas y el control de mision.
A un astronauta (con trajes menos rigidos que los lunares) le hubiera alcanzado con una pala. Hace un pozo, mete el sensor y lo tapa. Si corta un cable, se lo lleva al taller y lo repara.
«Hasta que no tengamos robots con una inteligencia similar a la humana, las personas son irremplazables.»
Así empezó la trama de «Blade Runner»… y mira en lo que terminó…da un poco de miedito! jeje
Sorprendente! Sobresaliente! Impecable! Inigualable! Los informes de Daniel se superan con el tiempo! Cómo hace este hombre para mejorar así? No tiene comparación… No se puede creer el nivel de detalle de esta entrada!!! Un lujo que nos regala este profesional de la divulgación científico técnica!
Siempre estaremos en deuda con Daniel!!!
1000 gracias por todo Daniel! Que estes bien! Saludos a todos!
Les deseo lo mejor desde la fresquita Patagonia!
Le llaman taladro pero eso es un penetrómetro, gastando lo que se han gastado no me explico cómo no han metido un taladro rotopercutivo, boca de matriz de cobalto e insertos de widia y un pequeño cargador de varillaje, incomprensible. Haceros a la idea que los penetrometros de la tierra pueden llegar a rebotar en suelos arcillosos y con percusión con pesos de 50kg.
Y luego la gente pregunta que para qué hace falta mandar humanos a Marte, que las máquinas son mucho más baratas y mejores…
Más de medio año para un p… agujero de 30 cm…
Un ser humano hace en dos dias lo que los rovers hacen en toda una misión. Un humano geólogo y/o paleontólogo con un martillo buscaría fósiles que serían el descubrimiento más grande a realizar en Marte. Serían los restos fósiles de vida pasada marciana. Aunque ya no haya vida ahora, el hecho de que haya existido en el pasado sería un gran descubrimiento y se podría estudiar a través de sus fósiles de similar manera a como hoy estudiamos los dinosaurios por los fósiles que quedaron de ellos
Te imaginas que no haya podido seguir avanzando porque chocó contra la parte superior de un cráneo de un mega fósil enterrado? Como es una máquina y sólo ve un área de entorno muy reducido es probable que se dejen de observar detalles macros del entorno donde decidieron perforar, que según sus cálculos no deberían haber encontrado piedras tan grandes que impidieran el avance del instrumento…