

En 2024 la agencia espacial japonesa JAXA quiere lanzar la sonda MMX (Martian Moons eXploration) para traer a la Tierra muestras de Fobos o Deimos, las lunas de Marte. Pero, además de recoger un pedazo de estos satélites, MMX dejará sobre la superficie de una de ellas un robot explorador desarrollado conjuntamente por Alemania y Francia. Recientemente los participantes en este proyecto —a los ya mencionados hay que sumar la otra agencia espacial japonesa, la ISAS— se reunieron para confirmar las fechas y los objetivos de la misión. Sin embargo, Japón ha comunicado que el objetivo de MMX todavía no ha sido seleccionado. Hasta hace poco la misión estaba centrada en Fobos, pero sin embargo no se descarta que, finalmente, se dirija hacia Deimos.

Fobos es a priori más interesante que Deimos, pero la menor gravedad y tamaño de esta última luna —12 kilómetros frente a 23— hacen de ella un objetivo más sencillo de alcanzar. Deimos tiene además una superficie más suave y con menos rocas, un factor decisivo en una misión de retorno de muestras. Fobos y Deimos despiertan un gran interés en la comunidad científica internacional debido a que la teoría más extendida sobre su formación es que ambos cuerpos nacieron del impacto de un gran asteroide con Marte. De este modo, el análisis de las muestras de Fobos o Deimos permitirán conocer mejor la formación de Marte. El DLR alemán se encargará del chasis y el sistema de movimiento del rover, además de desarrollar un espectrómetro y un radiómetro. Por su parte, Francia construirá a través de su CNES el sistema de cámaras para explorar la superficie de una luna marciana y la electrónica principal del rover (el CNES también contribuirá a la misión con el espectrómetro MacroOmega que viajará a bordo de MMX).


La colaboración en la misión MMX entre Japón y las agencias DLR y CNES es una extensión de la llevada a cabo durante la misión Hayabusa 2. Alemania y Francia aportaron a esta sonda el pequeño «rover» MASCOT (Mobile Asteroid Surface Scout) que aterrizó sobre el asteroide Ryugu. MASCOT no era un rover propiamente dicho, puesto que carecía de ruedas y se movía por la superficie dando saltos. Sin embargo, el rover franco-alemán de MMX sí que será un verdadero rover. La gravedad de Fobos es de solo 0.0057 m/s², o sea, unas 1700 veces inferior a la terrestre, pero muy superior a la de un pequeño asteroide como Ryugu. Por eso el DLR y el CNES creen que el rover podrá desplazarse usando cuatro ruedas. En principio el diseño no cambiaría si finalmente se elige Deimos, ya que la gravedad superficial de esta luna es de 0.003 m/s², es decir, la mitad de Fobos.
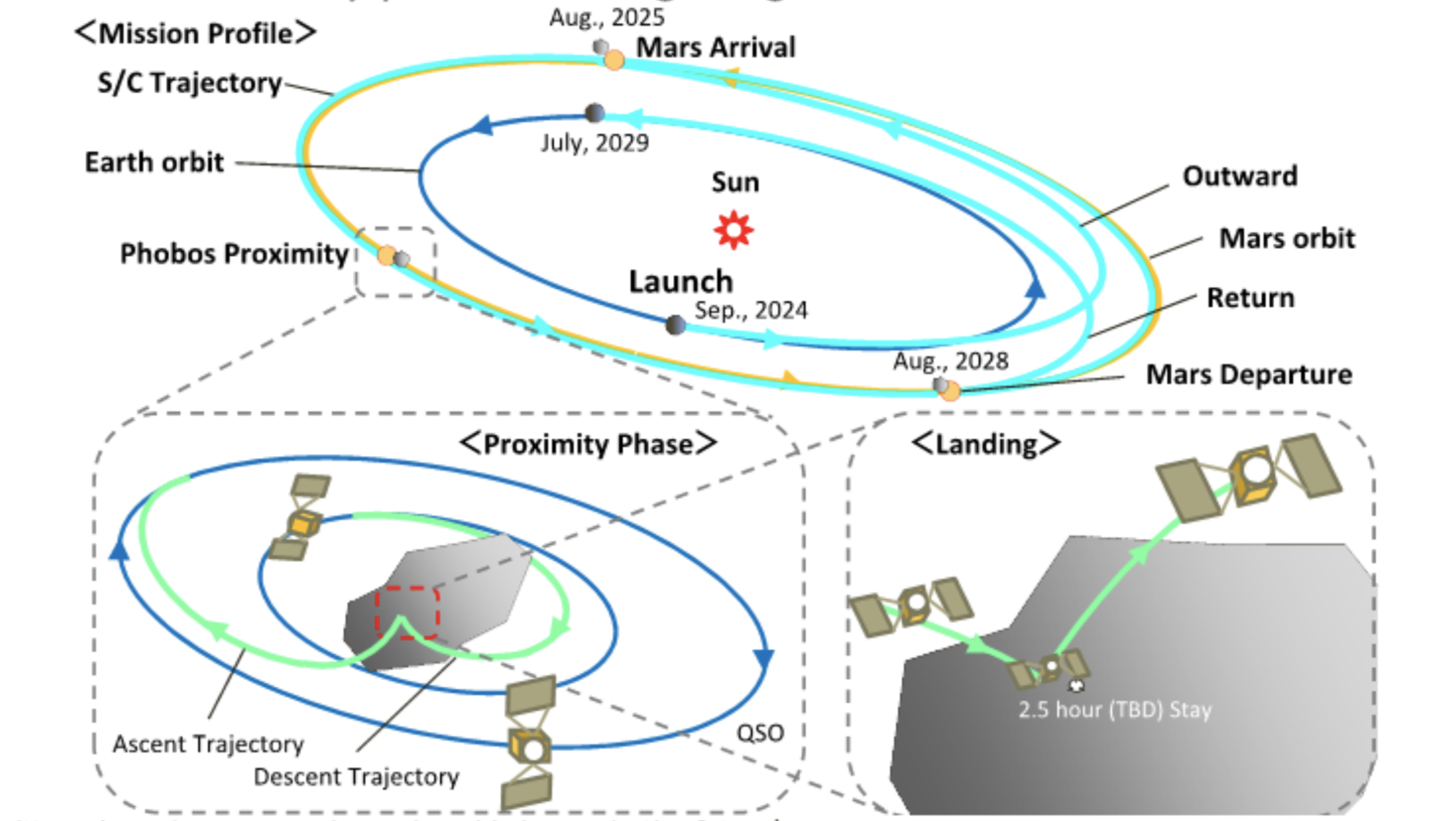

A diferencia de MASCOT, el rover europeo llevará paneles solares, lo que le permitirá sobrevivir varios meses rodando por Fobos o Deimos. Además deberá estudiar la superficie y el cambiante campo gravitatorio de estas lunas para ayudar a MMX en la elección de un lugar adecuado para traer muestras. La llegada a Marte de MMX tendrá lugar en 2025 y, con un poco de suerte, las muestras llegarán a la Tierra en 2029. El rover franco-alemán se convertirá en el primer vehículo con ruedas en explorar Fobos o Deimos y, ya que estamos, un cuerpo menor del sistema solar. Sin embargo, no es el primer ingenio humano diseñado para explorar la superficie de estas lunas. En 1989 la sonda soviética Fobos 2 fue lanzada con la subsonda PrOP-F, una especie de pelota de 50 centímetros y 45 kg de masa que tenía que haber recorrido la superficie de Fobos dando cuatro saltos en cuatro horas usando dos brazos plegables. Lamentablemente, se perdió el contacto con la sonda en órbita marciana poco antes del despliegue del PrOP-F. Esperemos que el rover europeo tenga mejor suerte.


Referencias:
- https://www.dlr.de/dlr/en/desktopdefault.aspx/tabid-10081/151_read-36252/year-all/#/gallery/35642
Gracias por esta entrada informativa Daniel. Muy buena como siempre.
Podra ESA-JAXA sacar adelante esta mision para el 2025? Tiempo bastante «corto» para los numeros que se barajan normalmente…
Da la impresión de que aquí no habrá intervención de la ESA.
Exacto. Es una misión japonesa con colaboración de dos agencias nacionales europeas. La ESA no está ni se la espera. Una pena. Si la ESA hubiera colaborado con la JAXA en esta misión se podría haber enviado un rover más grande, pero claro, como se trata de «marcar paquete» por parte de la DLR y del CNES, pues mandan este pequeño rover. Todo sea porque unos y otros se sigan creyendo grandes potencias.
Gracias por las aclaraciones, al ver participación europea asumí erróneamente que participaba la agencia europea. Mala comprension lectora mia.
Hola,
Que siga proliferando la cooperación.
Es el camino más solido, previsibles y robusto frente a los vaivenes de políticas domésticas.
Creo que se genera mayor compromiso para llevar a cabo los proyectos cuando se involucran acuerdos internacionales.
También se habre la oportunidad de participar a paises/agencias con desarollos más modestos lo que les permite a estos a su vez apalancar su propia expansión y crecimiento en temas aeroespaciales y de investigación.
Saludos
Es una gran noticia. El estudio de estas lunas creo que será clave para la futura exploración de Marte. Por su baja densidad es posible que tengan hielo de agua y la presencia de algún volátil útil como propelente.
Viajar a Marte y repostar en Fobos o Deimos, dos estaciones espaciales de origen natural!!
Una pena que en España sigamos sin agencia espacial con la que apoyar estas misiones de cooperación fuera de la ESA
Pues yo soy de la opinión contraria: la ESA debería convertirse de una vez en la Agencia Espacial de la UE y absorver todos los medios y recursos de las agencias nacionales. No tiene sentido mantener esa duplicidad porque esas agencias nacionales, por sí mismas, no tienen capacidad real alguna para lanzar sus propias misiones de exploración. Es malgastar recursos. Pero es algo muy europeo porque, ¿para qué le sirven a la UE sus veintitantos ejércitos nacionales si luego los que tienen que poner medios son Francia, Alemania, España, a veces Italia y antes el Reino Unido? En lugar de concentrar recursos se dilapidan en el altar de la «soberanía nacional» sin que sirvan realmente para nada.
El haber metido tantos países en la UE, después de España, creo que impide un consenso y un crecimiento equilibrado de Europa. El desarrollo será más complicado, pero me gustaría que fuera hacia adelante y se profundice en la unión. Parte de ello, creo que debería promover las empresas conjuntas en el espacio. Siempre que sea coherente. Quizás en algunos proyectos pequeños, sea más eficaz el que se haga en una región o país X.Espero que pronto pongan un ejército europeo, a fin de poder soportar la presión de EEUU en inversiones, o que Europa tenga una actitud X sobre un país determinado.
Estoy de acuerdo contigo Hilario, pero dado que en Europa las cosas van al paso de un caracol…pues no es mala idea tampoco crear un agencia espacial propia que presione y crea proyectos propios donde participar…al final países como Grecia, Polonia, Portugal, etc han creado sus propias agencias espaciales, para darle más peso a «su» dinero y apostar por proyectos donde potenciar su industria…más otros países como Croacia, etc están apostando por crear también su propia agencia…
Al final España no tiene un organismo que presione al gobierno para mayor apoyo al sector espacial, por un mejor presupuesto, y tampoco para crear proyectos propios, ni para presionar el estar incluido en proyectos internacionales…
Mientras la ESA no sea una agencia espacial federal de la UE, lo mejor es que España apueste por la suya…
Estoy de acuerdo con usted.
En un mundo ideal, estaría la ESA, y sería esta agencia la que aglutinaría, todos los centros, y toda la voluntad de los países europeos, en cuanto a la exploración espacial.
Pero a día de hoy por gracia o desgracia, pues no es así.
Por tanto, se hace en mi opinión necesario, o muy necesario, que España, monte su propia Agencia Espacial, para embarcarse en proyectos conjuntos, o propios, (PLD Space, y otras empresas pequeñas y recientes para el sector espacial, tendrían mejores perspectivas de tener una Agencia Espacial Española), y poner en valor nuestras empresas, y centros de investigación y desarrollo, en el ámbito nacional, internacional, así como para conseguir más relevancia en el ámbito nacional presupuestario.
Y efectivamente el INTA no engloba ni de lejos, todo lo que tiene que englobar una Agencia Espacial. Puede ser parte de su germen, pero ni de lejos el único.
Salu2
Haberla hayla: el INTA (Instituto Nacional de Técnicas Aeroespaciales). No obstante, en Europa solo Francia, Alemania, Italia y Reino Unido tienen suficiente dinero, población y tradición aeroespacial como para embarcarse en proyectos así. Saludos.
No, Pedro, el INTA no es una agencia espacial. Ni siquiera se aproxima. Puedes leerlo en su web (inta.es):
«El Instituto Nacional de Técnica Aeroespacial es el Organismo Público de Investigación (OPI) dependiente del Ministerio de Defensa. Además de realizar actividades de investigación científica y de desarrollo de sistemas y prototipos en su ámbito de conocimiento, presta servicios tecnológicos a empresas, universidades e instituciones.
El INTA está especializado en la investigación y el desarrollo tecnológico, de carácter dual, en los ámbitos de la aeronáutica, espacio, hidrodinámica, seguridad y defensa.»
De hecho, el INTA ni siquiera asume la representación de España en la ESA, que se vehicula a través del CDTI (Centro para el Desarrollo Tecnológico e Industrial).
El INTA lanzó algunos cohetes sonda entre los 70 y 80 desde el polígono experimental de El Arenosillo (Huelva) y se encargó de montar el primer satélite orbital español allá por 1974, pero NUNCA ha sido una agencia espacial española.
Vaya con el diseño, parece una caja de zapatos. O el robot de reparto de Amazon. Está claro que los alemanes llevan el concepto de «cabezas cuadradas» hasta los rincones más recónditos del universo. No sé cómo los franceses han permitido un diseño tan vulgar, tan alejado del estilo y buen gusto que se supone les caracteriza.
Bueno, lo importante es que la misión salga bien. Sería un puntazo para Europa y para Japón. Pero también, en el lado negativo, hay que decir que esta misión es un «fracaso» de la ESA, ya que la misión va a ser fruto de la colaboración entre la JAXA japonesa y dos agencias nacionales europeas: la alemana (DLR) y la francesa (CNES), lo que desde mi punto de vista supone una muestra más de la «desunión» europea y del lastre que supone tener por un lado una agencia conjunta (ESA) y unas agencias nacionales que le disputan recursos. Estas muestras de ridículo nacionalismo espacial (ni la agencia alemana ni la francesa tienen medios ni influencia por sí mismas para pintar algo más que el papel de comparsas en la exploración espacial) me cabrean muchísimo.
Una puntualización al artículo de Daniel: la ISAS (Institute of Space and Astronautical Science) no es que sea «la otra agencia espacial japonesa», sino que durante muchos años fue la agencia espacial japonesa encargada de temas de investigación espacial (que disponía de sus propios medios de lanzamiento, los cohetes de combustible sólido Mu), mientras que del lanzamiento y explotación de satélites de telecomunicaciones y otros vehículos (con medios propios, cohetes lanzadores de combustible líquido de diseño estadounidense fabricados en Japón bajo licencia) se encargaba la NASDA (National Space Development Agency of Japan). Desde el año 2003, tanto la ISAS como la NASDA, junto al Laboratorio Nacional Aeroespacial de Japón (NAL), se integraron en un único organismo: la JAXA (Japan Aerospace Exploration Agency). La JAXA dispone de un presupuesto anual de unos 2.000 millones de dólares (el 10% del de la NASA).
Digamos que la ISAS dentro de la JAXA es algo así como el JPL dentro de la NASA, salvando las distancias, claro.
Gracias por el artículo Daniel!
…y gracias por las explicaciones sobre la ISAS Hilario, me había quedado un poco descolocado al leer el artículo.
A mi me pasa lo mismo al ver el diseño: si lo viese como juguete no lo compraría por cutre… pero oye, igual las especificaciones técnicas no son tan duras como en Marte. De todas formas da la impresión de frágil
Gracias por la aclaración. Me había descolocado.
Hay que respetar la subsidiariedad, Hilario.
Por el momento.
Como dicen por arriba parece una caja. Una caja que se va a poner en orbita alrededor de Deimos con solo mirarla por culpa de la baja gravedad de esa luna.
Lastima que la ESA no participe.
Se me hace difícil imaginar como podría rodar con la baja gravedad de Deimos.
De hecho, el decir que «creen que podrá rodar» no es en absoluto tranquilizador al respecto.
Pues yo tampoco salgo de mi asombro… y no es por tener que comerme sin aderezo lo que le respondí a Erick en esta otra entrada 😉
Es que U-95 da en el clavo con su «exageración» de más arriba. La velocidad de escape de Deimos es de apenas 20 km/h. Incluso asumiendo que el rover se desplazará «en cámara superlenta», me resulta totalmente contraintuitivo que la «tracción convencional» pueda operar en ese ambiente de bajísima gravedad.
Pero en fin, cosas más raras se han visto 🙂
¡¡ Que horror de diseño !!
como científicos serán la caña, pero como diseñadores les doy un -3 bajo
Así no cautivan las volátiles mentes del anestesiado pueblo llano, ajeno a todos los esfuerzos por hacer ciencia fuera de la vieja Tierra.
¿no será que esconden en su interior y en secreto un par de zapatillas de deporte para hacer publicidad con ellas cuando se abra el rover?
– ¡¡ Señoras y señores, las primeras zapatillas de deporte en llegar a Deimos la luna de Marte estarán a la venta la semana que viene por el astronómico precio de….?
…porque tiene toda la pinta por su forma.
Me resulta simpático que ya varios reclaman que aparezcan rovers diseñados por Pirinfarina 😉
Tiene un cierto parecido a Bob Esponja.
¡Y yo que me reía del rover lunar del ISRO!
Vaya proesa la de la jaxa/ESA para poder hacer rodar ese rover por la superficie de esa minúscula luna además que no le veo sentido si el objetivo es recoger muestras no sería mejor un robot con patas como los robots de Boston dinamic 🤔
PD : mañana se lanzará el tercer Falcon hevy con un satélite con vela solar para alcanzar su órbita esperemos que todo salga bien 😁
Vuelven a encontrar Metano en Marte. Curiosity es el descubridor:
https://phys.org/news/2019-06-curiosity-rover-high-methane-mars.html
perdón seria mucho soñar con un robot con patas tipo los de la empresa Boston dinamic para explorar esta luna ya que los japoneses tiene la tecnología de robot andantes bastante pulida ?
pd : mañana se lanzara el tercer falcón heavy con un satélite que llevara una vela solar para alcanzar su orbita final esperemos que Daniel tenga tiempo para deleitarnos con un buen articulo .😉
FdT: SpaceX ha lanzado su tercer FH y ha vuelto a perder un tercer boster core, parece una maldición. ¿Alguien sabe qué ha pasado?
La core-maldición.
Es una lástima lo del Core, me amarga un poco el pastel (que continúa siendo una delicia en conjunto).
De todas formas, la recuperación de las primeras etapas no influye en la Misión, que es lo realmente importante.
Además, esta misión era particularmente importante de cara a la certificación del FH para la USAF, a los boosters reutilizados y, sobre todo, a demostrar las prestaciones de la etapa superior: ha realizado varios reencendidos para situar diferentes cargas en diferentes órbitas con distintas inclinaciones orbitales.
Musk dijo que el Falcon Heavy puede acceder a cualquier órbita a la que pueda llegar un Atlas V o un Delta IV. La capacidad de la etapa superior, demostrada hoy, le da la razón.
Dos FH lanzados en 74 días reciclando los boosters laterales: toda una demostración de lo que puede ser el FH a nivel operativo (el récord de reciclado continúa en ~71 días, pero esta vez se han reciclado dos boosters en el mismo tiempo).
Resumiendo: la misión -vital para el futuro del FH y los boosters reutilizables- ha sido un éxito.
(confieso que aún no he visto el lanzamiento).
Parece que por las caracteristicas del recorrido suborbital del core volvia demasiado rapido y eso produjo problemas. Supongo que deberan retocar el software.
¡Se ha recuperado una cofia!
Oéé oé oé oééé, oééé oééé.
Por primera vez, el barco caza-cofias Ms. Tree* (antiguo Mr. Steven) ha cazado una cofia al vuelo. ¡Por fin!
Sí, wa ha ha, es otro acontecimiento «histórico» para SpX y el mundillo espacial.
Cuando parecía que quizá no iba a funcionar (tampoco se han dedicado a ello muy en serio) finalmente lo consiguen. ¡Bravo! Otra demostración de ambición, capacidad técnica y perseverancia.
Consecuencias: si consiguen recuperarlas con regularidad (o aprovechar las pescadas del mar) y reutilizarlas, los costes de la familia Falcon disminuirán aún más.
– Hago notar que para recuperar las cofias no es necesario tener un cohete reutilizable. Lo que quiero decir es que cualquier empresa de cohetes puede intentar recuperar las cofias y reutilizarlas para reducir costes (algunas cofias grandes cuestan 15-20 millones).
Pero ninguna lo ha hecho. Es un dato significativo.
*: Ms. Tree = Mistery (Mis T ree). Wikipedia dixit. Es un personaje de cómic.
Para mover un cacharro en microgravedad yo hubiera mandado a ponerle no ruedas sino un grupo de patas articuladas (dos articulaciones cada una), digamos seis, terminada cada una en una pinza de tres dedos articulados (2 articulaciones cada uno), vamos, una «mano», que podria girar libremente sobre su «muñeca». Cada pata tendria un par de camaras adosadas (estereoscopia).
Ademas, cada pata deberia poder alzarse sobre el cuerpo, como un periscopio.
Esta configuracion fisica acompañada del software adecuado tendria cada paso compuesto de seis movimientos.
El movimiento de cada pata + mano buscaria la protuberancia (convexidad) que le quedara mas cercana y se agarraria, girando como fuera necesario, comprobando luego la fortaleza del agarre. Una vez asegurada se procederia con la siguiente pata en la misma direccion.
El cuerpo del robot podria cambiar de posicion sobre sus patas aunque sus manos quedaran fijas. Eso permitiria moverse de costado, dando superficie de exploracion a las patas del lado opuesto a la direccion del movimiento.
En este istema de locomocion no habria proa ni popa. Cualquier direccion podria ser «adelante».
Tambien seria util sobre un asteroide, especialmente para sujetarse y perforar.
En fin, meditaciones tecnicas ociosas de lego en la materia. Pero me divierten mucho 🙂
No sé porqué se quejan algunos del diseño de la sonda, si el diseño ideal para cada uno está dentro de la caja.
The picture you show of the Rover was taken from my personnal twitter account and it’s not a DLR picture. It’s a rover mock-up that CNES built when we were developping the rover on our own (before DLR got on board). Please correct. Gracias !
Done. Thank you for the message, Simon. Of course, if you wish, I can remove the picture.