

Resulta obvio que el paradigma de la exploración planetaria pasa actualmente por la Luna. Europa, Japón y Canadá han decidido participar como socios menores del proyecto de estación en órbita lunar Gateway, liderado por Estados Unidos. Una de las pegas de este proyecto es, a priori, el papel poco relevante que juega la ciencia. Para compensar este defecto, las agencias espaciales de Europa (ESA), Canadá (CSA) y Japón (JAXA) quieren llevar a cabo una misión de recogida de muestras al polo sur lunar que, de paso, servirá para allanar el camino a una misión tripulada… siempre y cuando que la NASA no se adelante con el programa Artemisa y ponga un ser humano en la superficie lunar en 2024 (algo que sigue siendo poco probable a día de hoy).

La misión se llama HERACLES (Human Enhanced Robotic Architecture Capability for Lunar Exploration and Science), sin duda un bonito nombre. Ahora bien, ¿cómo diseñar una misión lunar realmente original que no haya sido lanzada ya por Estados Unidos, la Unión Soviética o, más recientemente, China? De entrada, HERACLES se apoyará en la infraestructura de Gateway, un punto que ya de por sí es novedoso. Pero lo más interesante es que HERACLES combina la exploración de la superficie lunar mediante un rover con el diseño de retorno de muestras. Nunca antes una sonda había sido creada para llevar a cabo estas dos funciones al mismo tiempo.


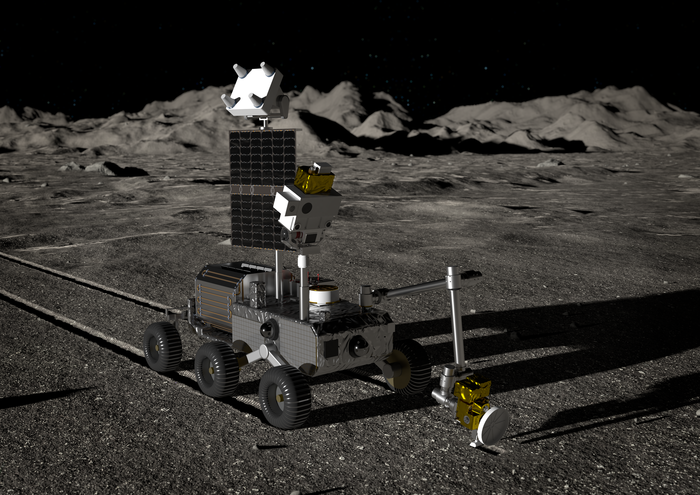
HERACLES será grande; tendrá una masa de 8,5 toneladas y estará dividida en dos partes principales: la etapa de descenso o LDE (Lunar Descent Element), construida por la JAXA, y la etapa de ascenso LAE (Lunar Ascent Element), que correrá a cargo de la ESA. La etapa LDE tendrá una masa de 6,8 toneladas, mientras que la LAE tendrá 1,1 toneladas. LAE usará un motor de 6 kilonewton para despegar y LDE dispondrá de un motor de 30 kN para el alunizaje, pero la novedad es que este último funcionará a base de oxígeno líquido y metano, una combinación jamás usada en una sonda Lunar. La CSA canadiense se ocuparía de construir el rover. Este vehículo, de 330 kg (incluyendo 90 kg de instrumentos científicos), descenderá a la superficie por una rampa construida por la ESA, y será capaz de recorrer cerca de 100 kilómetros. O sea, no se trata de un pequeño cochecito lunar, sino de un proyecto muy ambicioso. Para sobrevivir a la noche lunar, el rover canadiense estará equipado con un calentador a base de radioisótopos (RHU) suministrado por la NASA. También llevará un panel solar vertical como complemento (al aterrizar en una región polar el Sol estará bajo en el horizonte) y un avanzado brazo robot para estudiar el suelo (los brazos robot son la especialidad de la CSA).




El rover será el encargado de recoger las muestras tras un viaje de 30 kilómetros para luego traerlas de vuelta a la etapa de ascenso LAE. La sonda despegaría con nada más y nada menos que 15 kg de rocas lunares hacia la estación Gateway, donde sería capturada mediante el brazo robot canadiense. Posteriormente las muestras viajarían a la Tierra a bordo de una nave Orión. Después de llevar las muestras, el rover continuaría recorriendo la superficie lunar. Además de ser dirigido por control remoto desde la Tierra, los astronautas a bordo de Gateway ensayarían técnicas de telepresencia para conducirlo.
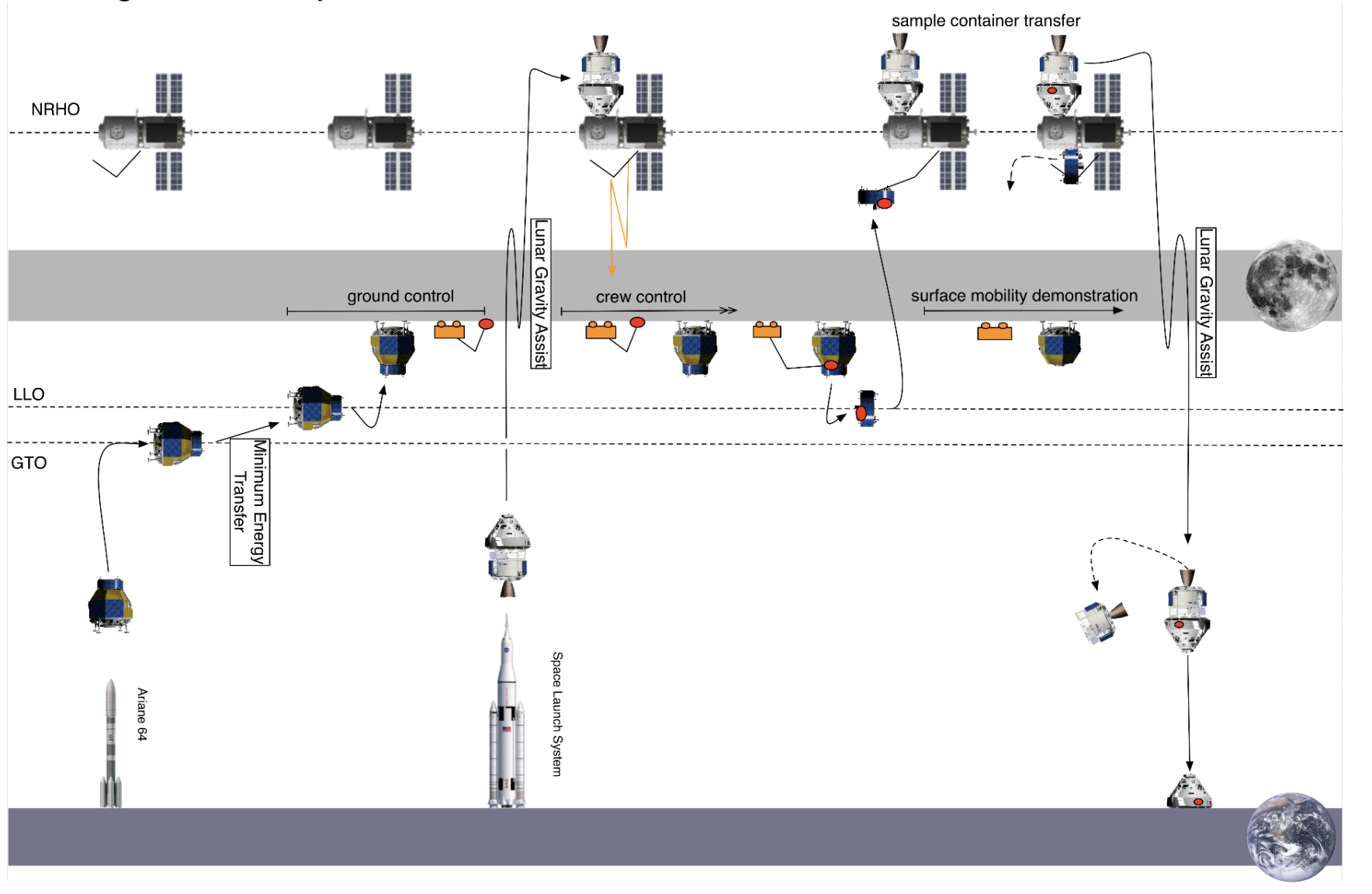

Si es finalmente aprobada, HERACLES debe despegar en 2026 a bordo de un Ariane 64 y aterrizará en la cuenca del cráter Schrödinger, cerca del polo sur lunar. Este cráter se halla en la cara oculta, así que la sonda deberá comunicarse con la Tierra a través de la estación Gateway (o quizás los chinos puedan prestarles los servicios de su satélite Queqiao). No obstante, no se descartan otras zonas de aterrizaje cerca del polo sur. HERACLES es un proyecto que lleva varios años sobre la mesa —antes era conocido como LEAP (Lunar ExplorAtion Precursor)— y es ciertamente interesante. Un problema al que se enfrenta esta misión es que debe competir desde el punto de vista mediático con el ambicioso programa chino Chang’e (para 2026 es posible que los chinos ya hayan logrado traer muestras de la cara oculta). Pero su principal rival es, paradójicamente, la NASA. Resulta difícil justificar una misión robótica tan compleja que tenga lugar más o menos al mismo tiempo que una misión tripulada. No en vano, HERACLES nació antes de que la administración Trump apostase decididamente por viajar a la superficie lunar.



Referencias:
- https://www.hou.usra.edu/meetings/lpsc2019/pdf/1327.pdf
- https://confit.atlas.jp/guide/event-img/jpgu2019/PPS08-16/public/pdf?type=in&lang=en
- https://meetingorganizer.copernicus.org/EGU2019/EGU2019-9274.pdf
- https://fanfun.jaxa.jp/event/files/event_20190128_ws_02.pdf