

La última vez que hablamos de las andanzas de Curiosity por Marte nuestro simpático robot estaba analizando el daño que habían sufrido sus ruedas al desplazarse sobre la dura superficie del cráter Gale. Durante el pasado diciembre (soles 489 a 491) el rover se dedicó a estudiar los alrededores, además de sus ruedas, usando las cámaras Mastcam, ChemCam y MARDI, además de la cámara MAHLI situada en el extremo del brazo robot. En el sol 494 (26 de diciembre de 2013), Curiosity se desplazó 23 metros y permanecería estacionario hasta el sol 504 (5 de enero). En el sol 502 reanudó las operaciones científicas completas y se dieron por finalizadas las operaciones de mantenimiento. Entre los soles 504 y 506 Curiosity se movió un total de cincuenta metros, estudiando la roca Oneida con las cámaras y el espectrómetro APXS. El rover continuó moviéndose y en el sol 512 estudió la roca Kodak.

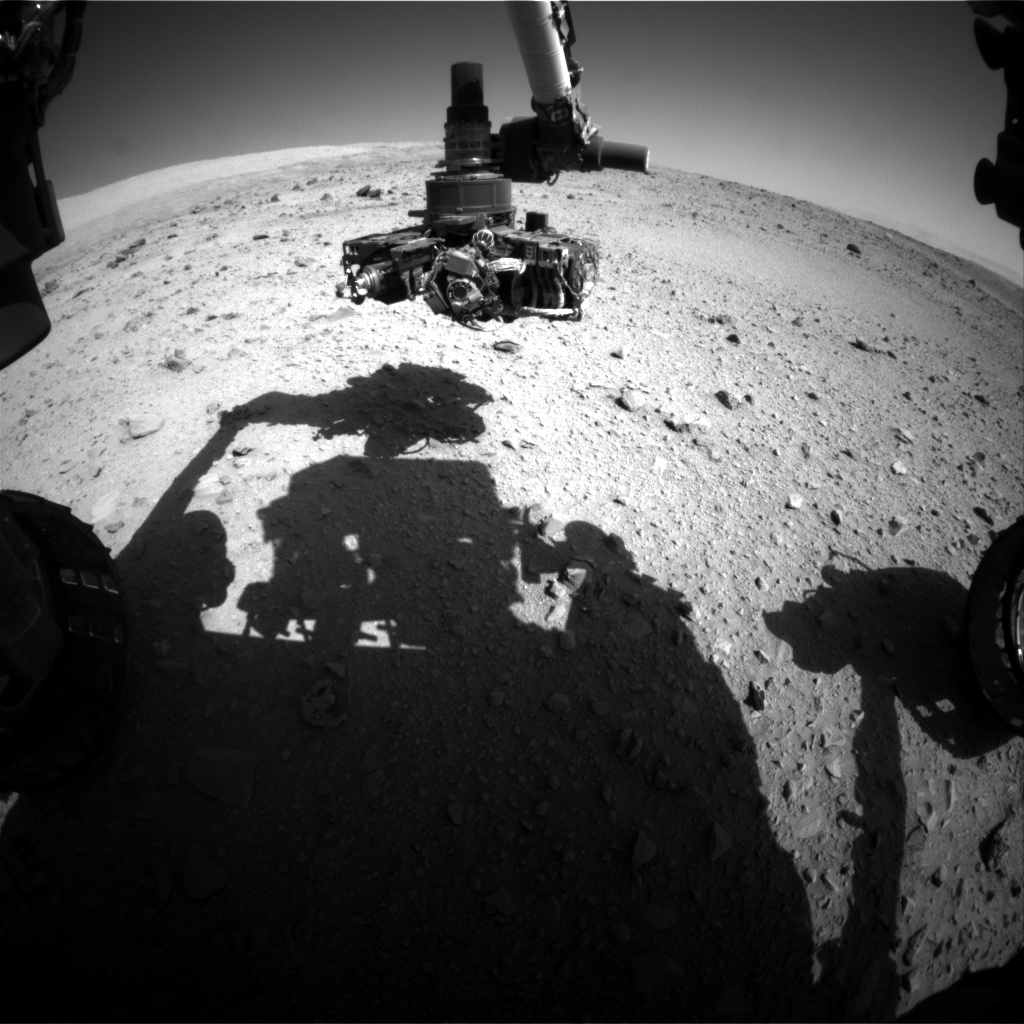
Durante el sol 513 se usó la cámara MAHLI para, una vez más, analizar el estado de las ruedas en detalle. Se tomaron imágenes entre dos periodos de conducción para ver si se había producido algún daño significativo. Por otro lado, el experimento ruso DAN (Dynamic Albedo of Neutrons) para la detección de hielo subterráneo también tomo medidas del contenido de hidrógeno de las rocas. Durante esta operación DAN disparó su pulso de neutrones número dos millones. DAN emite pulsos de neutrones de un microsegundo de duración y mide la energía de los neutrones que son reflejados hasta 60 centímetros de profundidad, una energía que depende de la cantidad de hidrógeno presente en los minerales y, por ende, de la cantidad de agua. DAN ha sido diseñado para emitir una cantidad de pulsos cinco veces superior, así que todavía le queda vida útil por delante. Los datos de DAN han permitido averiguar que las rocas de la zona superior del cráter Gale incluyen un 1,5% de agua y hasta un 3% en las rocas situadas a mayor profundidad.

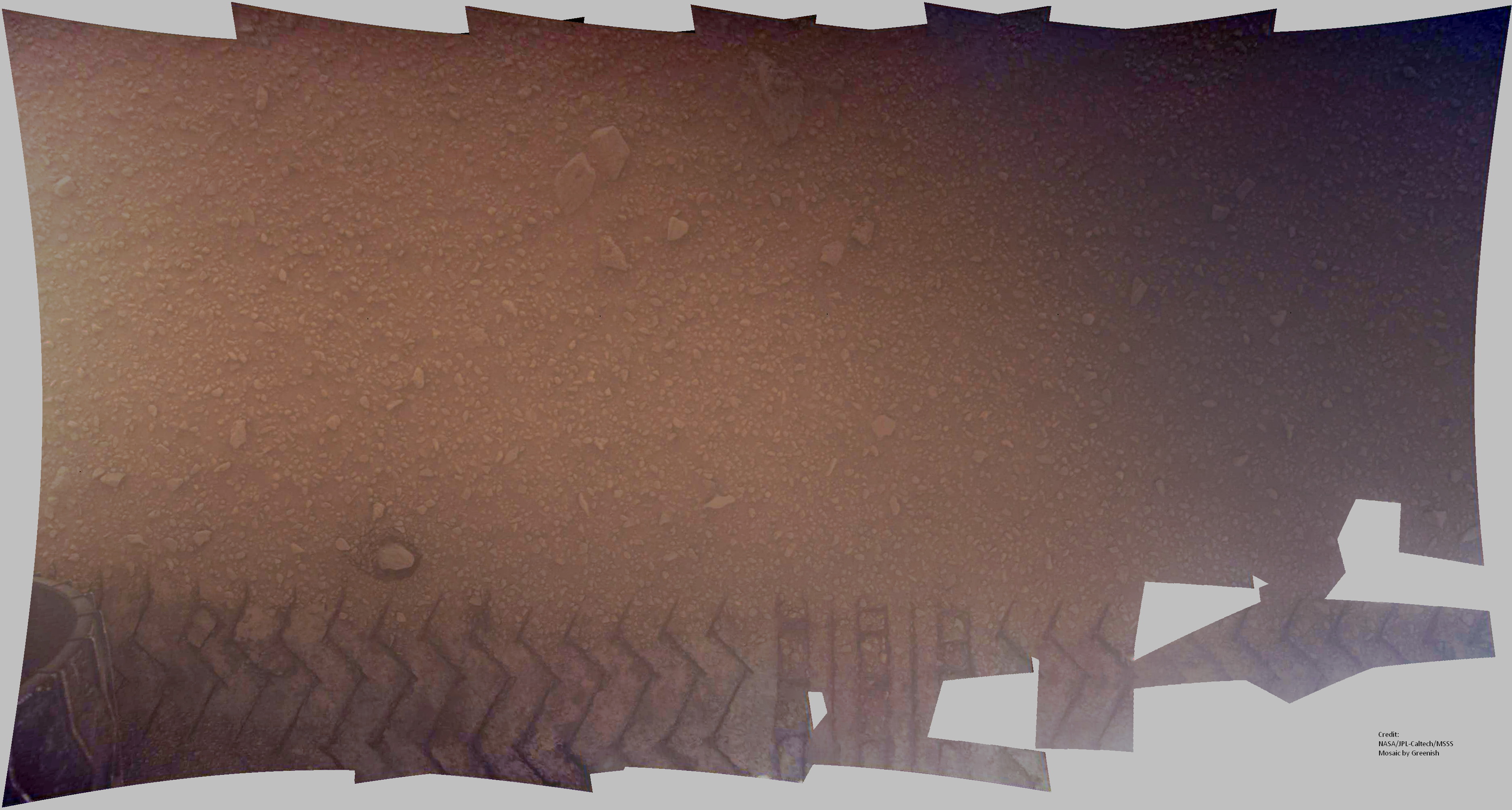
En sol 513 Curiosity solamente se desplazó 1,09 metros por culpa de un error en la secuencia de eventos planeados por el control de la misión. Una vez corregido, al día siguiente se movió 33 metros. Un día más tarde se estudió la roca Harrison con el láser de ChemCam y con el microscopio MRI. Harrison demostró ser una roca volcánica muy curiosa, con cristales de feldespato de un centímetro incrustados en una matriz oscura de piroxenos. En el sol 516 se analizó la roca Oscar y en el sol 517 se realizó un panorama con la cámara ChemCam. El rover siguió adelante y en el sol 520 estudió de forma remota las rocas Doran y Togo con las cámaras Mastcam y ChemCam. El el sol 521 y 522 Curiosity volvió a fotografiar sus ruedas mediante las cámaras MARDI y MAHLI en sesiones que tuvieron lugar entre recorridos durante los cuales el rover recorrió 31 centímetros. La cámara MARDI no puede fotografiar las ruedas -apunta directamente hacia el suelo-, pero se emplea para analizar las características del terreno a escala milimétrica. Para evitar el anómalo -que no dramático- desgaste de las ruedas el equipo de la misión está estudiando varias alternativas, como conducir marcha atrás o usar los motores de sólo cuatro ruedas en vez de los seis que emplean actualmente.





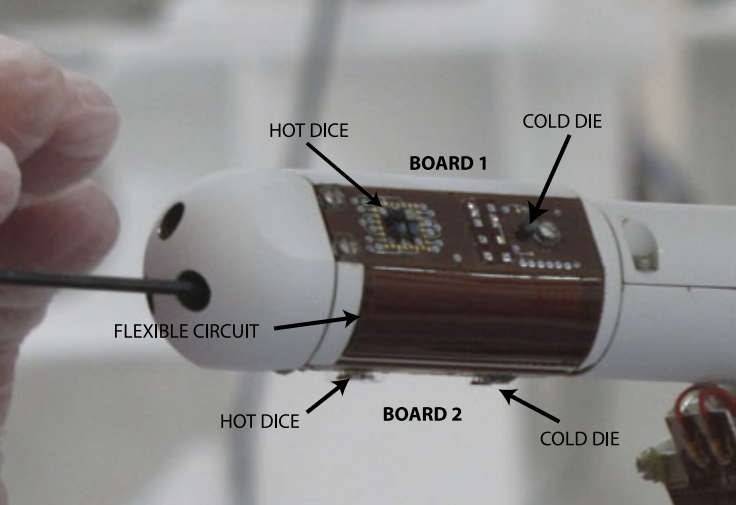
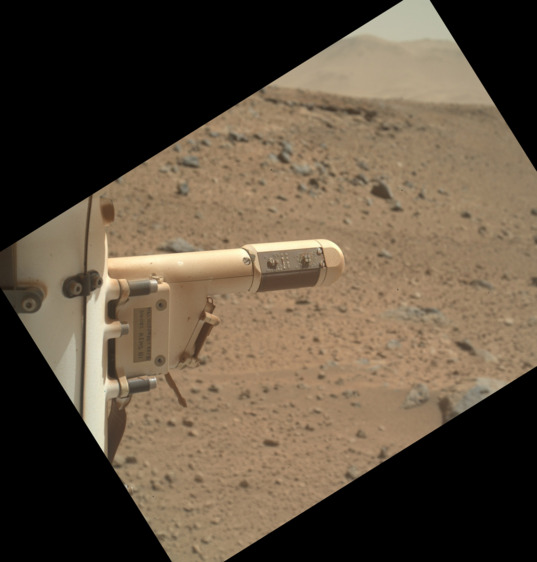
El 24 de enero de 2014 el equipo de la misión decidió dirigir al rover hacia las cercanías de un pequeño valle que posteriormente se denominaría el Hueco de Dingo (Dingo Gap) situado entre dos salientes erosionados. En el sol 525 se analizó la roca King y el experimento SAM tomó medidas de la composición de la atmósfera. Durante el sol 526 la roca Reedy fue analizada y se usó la cámara MAHLI para estudiar el estado del instrumento REMS, fabricado en España. REMS (Rover Environmental Monitoring Station) es una estación meteorológica que mide la velocidad y dirección del viento, presión, temperatura y niveles de radiación ultravioleta. Los sensores para medir la velocidad del viento están localizados en dos pequeños brazos –booms en inglés- que salen del mástil del rover (el ‘cuello’ de Curiosity). Uno de los brazos (Boom 2) apunta hacia delante, mientras que el otro (Boom 1) forma unos 90º con el anterior. Cada brazo tiene tres placas de circuitos expuestas al aire marciano que deben medir la fuerza y dirección del viento. Desgraciadamente, el instrumento para medir el viento en el Boom 1 resultó dañado durante el aterrizaje de Curiosity en 2012, probablemente por el impacto de algún guijarro que salió despedido debido a la acción de los motores de la etapa de descenso. Sin uno de los sensores funcionando, REMS no puede medir la dirección del viento con la precisión prevista. No obstante, en las imágenes de MAHLI tomadas recientemente los booms de REMS parecen estar en perfecto estado. Todo un pequeño misterio.




El 28 de enero de 2014 (sol 526) se fotografió una duna de arena de un metro de altura que se encuentra frente a la formación Dingo Gap y que obstaculiza el acceso directo a la zona.

En el sol 528 se decidió dirigir a Curiosity hacia Dingo Gap, pero primero había que analizar directamente la duna. Al final de ese mismo día, el equipo de Curiosity optó por estudiar la cohesión de las partículas de la duna usando las ruedas frontales del rover para ‘rascar’ su superficie antes de aventurarse a atravesarla. Y es que las dunas marcianas son bastante traicioneras. En su momento el rover Opportunity estuvo a punto de quedarse varado para siempre en una aparentemente inofensiva duna conocida como Duna del Purgatorio. En el momento de escribir estas líneas, Curiosity ha recorrido ya un total de 4911 metros sobre la superficie de Marte.



En el sol 529 las cámaras Mastcam tomaron una imagen de la Tierra en el cielo vespertino. Ahora el equipo de Curiosity debe decidir cuál será el trayecto que seguirá el rover en las cercanías de Dingo. De acuerdo con el plan actual, tras completar el estudio de Dingo el rover se dirigirá a una región situada más al sur denominada KMS-9. Esta zona presenta formaciones expuestas al exterior que guardan ciertas similitudes con la región de Glenelg donde Curiosity encontró pruebas de un pasado habitable en el planeta rojo, por lo que está previsto que el rover use su taladro para perforar y analizar en detalle las rocas de esta zona. El destino último de Curiosity sigue siendo acceder a las faldas del Monte Aeolis donde se encuentran los minerales que constituyen el objetivo primario de la misión.
__
Eureka se presenta a los Premios 20 Blogs 2014. Puedes votar en este enlace. ¡Gracias!
Dani,
Como siempre… la bitácora de Curiosity es «adictiva» para mi. Muchas gracias por esta entrada con esas fotos tan espectaculares… la primera de todos es majestuosa, da idea de la amplitud del cráter Gusev… con esa cadena montañosa al fondo… impresionante la foto en falso color (como dices) al atardecer… lo que daríamos por ver un atardecer en Marte… :o)
Saludos.
Mi voto ya lo tienes y el comentario también porque te lo mereces, Dani.
Gracias por tu esfuerzo y trabajo.
Votado, mucha suerte en esta edición.
Muchas gracias 😉
Siempre es una buena noticia ver que hay una nueva bitácora de Curiostiy. Cuando iba leyendo, pensé que ibas a cerrar el post con esta gran foto:
http://planetary.s3.amazonaws.com/assets/images/4-mars/2014/20140131_0528ML_panorama_valley-beyond-dingo-gap.jpg
Saludos!!
Votado!
que impresionante seección de imágenes… para perderse mirándolas, y los gif más todavía.
Saludos!
¡Gracias!
alguna idea de por q habra fallado el sensor? o.o
Votado, mi voto valio saltar del 8° al 6° puesto!!! y Vamos por mas!!!
Muchas gracias de ‘corasón’ 😉
Votado. Vamos los 5º con 20 votos… pero subiremos.
Dani, No me canso de darte las gracias… ya he dejado atrás la categoría de «espaciotrastornado» para entrar en otra dimensión. Ahora soy «Eurekatrastornado».
Agradecido quedo.
Muchas gracias por mantenerlos informados. Una preguntita: ¿cuando está previsto que llegue a las faldas del Monte Aeolis?
Todavía no se sabe, todo dependerá del progreso de la misión, pero se cree que a finales de este año.