

Seguimos con la Fobos-Grunt. Los detalles sobre la misión escasean, especialmente en lo relativo a la planificación del aterrizaje. Por eso me ha gustado una presentación de A. Zhakarov (IKI) denominada Navigation and Motion Control of the Phobos-Soil S/C during Approach and Landing. Como su título indica, el documento está dedicado a las maniobras de aproximación y aterrizaje que debe realizar la Fobos-Grunt para posarse sobre la pequeña luna marciana.



Características generales de la Phobos-Grunt (IKI/Roskosmos).

Esquema de la misión (IKI/Roskosmos).
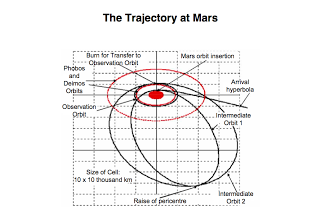
Maniobras principales que debe realizar la sonda para alcanzar la órbita de Fobos: tras la inserción orbital, serán necesarias dos órbitas intermedias antes de alcanzar el satélite (IKI/Roskosmos).
Inserción en una órbita cuasisincrónica alrededor de Fobos (IKI/Roskosmos).

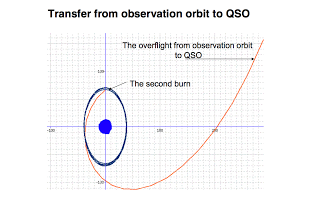
Aterrizaje desde la QSO: se realizarán dos encendidos antes de comenzar el descenso vertical (IKI/Roskosmos).

Posibles zonas de aterrizaje (IKI/Roskosmos).
Las condiciones que deben tenerse en cuenta en el momento del aterrizaje son:
- Situarse en una órbita cuasi-sincrónica (QSO) alrededor de Fobos.
- Iluminación: el ángulo formado por el Sol y la sonda con la superficie deberá ser de 20º-70º.
- Visibilidad desde las estaciones de Yevpatorya, Ussuryisk y el lago Medved.
Los instrumentos que se usarán en esta maniobra serán:
- Altímetro láser.
- Sensor estelar.
- Sistema de navegación inercial.
- Sistema de televisión.
- Radar Doppler.
Seguiremos recabando más detalles.
Parece increíble que después de tantos años sin experiencia en sondas interplanetarias, los rusos se arriesguen a una misión tan complicada y novedosa. Ojalá me equivoque, pero cada vez que leo algo de esta sonda, lo primero que pienso es: «es imposible que no haya algo que acabe saliendo mal».
Temo que estoy de acuerdo contigo, Monsieur. Sin duda, lo más fácil habría sido comenzar por un satélite como la Mars Express, pero ya lo dice el dicho: «el futuro es de los atrevidos». Esperemos que sea así.
Lo que más me preocupa es lo que escribió Anatoly Zak: el software de control de la nave está todavía en un estado bastante rudimentar de desarrollo. Imagínense si deciden lanzar esta nave, que deberá ejecutar maniobras tan complejas, sin largas y exhaustivas pruebas! Ansio ver una misión interplanetaria rusa, pero una que funcione, y espero mucho que terminen aplazando el lanzamiento para el 2011.
Parece muy complejo..y todo después de haberse desprendido del satélite chino y la estación (¿ó estaciones?)meteorológica finesa. Me pregunto: es necesario desarrollar un software de guíado para cada sonda que se construye? No soy experto (ni mucho menos en el tema) pero entiendo que las maniobras, de corrección de trayectorias y aterrizajes son comunes a todos los vehículos interplanetarios. Un saludo.
Nicolás – Argentina
Estoy de acuerdo con monsieur le six y Daniel. Se me hace un nudo en el estómago al pensar que pueden lanzarla este año. Estoy convencido de que acabarán aplazándola a 2011, o mucho me temo que no saldrá bien (de nuevo el nudo en el estómago). O eso, o están más adelantados de lo que dicen (poco probable).
Contestando a otros: dudo que el último software de guiado que tenga la agencia rusa corra en Phobos-Grunt, es totalmente nuevo. Aún así, para cada misión se incluyen pequeña mejoras (además de adaptarlo y «parametrizarlo» a las particularidades de la misión). Lo que sí podrían hacer (como en el caso de los MER) es enviar el sw de superficie una vez que la sonda vaya rumbo a Marte.