

El próximo sábado día 26 de noviembre dará comienzo una aventura apasionante. Porque en menos de seis días la NASA se dispone a lanzar rumbo a Marte la nave más compleja, fascinante y revolucionaria que haya concebido el ser humano para el estudio del planeta rojo. Su nombre, Mars Science Laboratory (MSL), más conocida como Curiosity. Del tamaño de un utilitario pequeño y alimentado por energía nuclear, Curiosity será capaz de vaporizar piedras con un láser para analizar su composición a varios metros de distancia. Durante dos años terrestres, recorrerá la misteriosa superficie del Cráter Gale estudiando los numerosos sedimentos de la zona y buscando posibles huellas de la presencia de vida. Es difícil imaginar una misión más emocionante.

La misión MSL fue aprobada en 2004 después del rotundo éxito de los MERs (Mars Exploration Rovers) Spirit y Opportunity. Equipado con un conjunto de diez instrumentos científicos altamente complejos, MSL debía ser el laboratorio móvil definitivo, superando las numerosas limitaciones del diseño de los pequeños vehículos precedentes. En un principio, el rover debía tener una masa de 775 kg, pero finalmente ha alcanzado unos increíbles 899 kg. Para poder colocar en la superficie marciana semejante peso, los ingenieros tuvieron que desarrollar el mayor escudo térmico y el mayor paracaídas empleados en una misión planetaria. Aún así, no era suficiente. Para justificar su elevado coste, Curiosity debía poder acceder a la mayor parte de la superficie marciana, incluyendo las zonas más interesantes desde un punto de vista geológico y astrobiológico. Las anteriores misiones sólo podían acceder a las regiones con menor elevación para aprovechar la capacidad de frenado del paracaídas, así que los técnicos incorporaron en el diseño de Curiosity una etapa de descenso separable. Esta etapa frenaría la velocidad de caída y sería la encargada de posar al rover como si fuera una grúa volante (de ahí que el nombre de esta maniobra sea ptrcisamente sky crane). Por primera vez en una misión espacial, las ruedas de una sonda servirían al mismo tiempo como tren de aterrizaje.


Pero el camino no ha sido fácil. Inicialmente, el coste de la misión no debía haber alcanzado los 650 millones de dólares, pero la enorme complejidad del vehículo disparó la factura hasta límites insospechados. De hecho, se llegó a rumorear que la misión corría el riesgo de ser cancelada. En un principio estaba previsto que Curiosity despegase rumbo a Marte en septiembre de 2009, pero ese año la NASA decidió aplazar la misión hasta noviembre de 2011 por culpa del retraso acumulado por varios elementos de la misión. Este retraso le supuso a la agencia un gasto adicional de 400 millones de dólares. Finalmente, el coste de Curiosity se estima en unos 2500 millones.
MSL fue bautizado oficialmente como Curiosity en mayo de 2009. El nombre fue seleccionado mediante un concurso público organizado por la agencia en 2008 y en el que resultó ganadora la propuesta de Clara Ma, una niña estadounidense de 12 años.





Curiosity
La sonda MSL Curiosity tiene una masa al lanzamiento de 3893 kg y se divide en cuatro partes principales:
- Etapa de crucero interplanetaria (539 kg).
- Cápsula de entrada atmosférica y etapa de descenso (2401 kg).
- El rover Curiosity propiamente dicho (899 kg).


Distintas partes de la sonda (NASA).

La sonda MSL en configuración de lanzamiento (NASA).
Rover Curiosity
El MSL (Mars Science Laboratory) Curiosity es un robot de 899 kilogramos con 75 kg de instrumentos científicos.
Tiene una longitud de 3,0 metros y una anchura de 2,8 metros. La altura máxima es de 2,2 metros, mientras que la longitud de su brazo robótico es de 2,1 metros. Posee seis ruedas con un diámetro de 50 centímetros, cada una de ellas con un motor eléctrico independiente. Tanto las ruedas frontales como las traseras se pueden dirigir independientemente, lo que permite rotar el vehículo alrededor de su eje. La suspensión garantiza que las seis ruedas estén en contacto con el suelo en todo momento, independientemente de la rugosidad del terreno. La velocidad máxima del rover es de 0,144 km/h, aunque en condiciones normales se espera que no supere la mitad de esa cifra, recorriendo unos 200 metros al día de media. En todo caso, ha sido diseñado para recorrer un mínimo de 20 km durante su misión primaria. Podrá superar obstáculos de hasta 65 cm de altura sin problemas.
El cerebro de Curiosity estará formado por dos ordenadores redundantes dotados de microprocesadores BAE RAD 750 de 200 MHz (basados en los PowerPC 750) con 250 MB de memoria RAM y 2 GB de memoria flash, lo que no está nada mal si lo comparamos con el único procesador RAD6000 de 20 MHz que incorporaban los MER Spirit y Opportunity. En un momento dado, sólo uno de los ordenadores estará encendido, mientras que el otro actuará de reserva. Para asegurar las comunicaciones con la Tierra, Curiosity posee dos antenas en banda X (7-8 GHz) y otra de alta ganancia en UHF (400 MHz) capaz de retransmitir los datos a través de las sondas que se encuentran operativas actualmente en órbita marciana (MRO, Mars Odyssey y Mars Express).





Curiosity no será la primera nave marciana alimentada por energía nuclear, ya que ese honor recae en las Viking de los años 70, pero sí será el primer rover planetario que use exclusivamente esta fuente de energía. Los Lunojod soviéticos usaban RTGs a base de polonio como fuente de calefacción durante la noche lunar, pero la energía eléctrica se generaba mediante paneles solares. Del mismo, modo, los rovers marcianos anteriores han empleado pequeñas cantidades de isótopos radiactivos (aunque no RTGs) como calefactores. Curiosity está dotado un generador termoeléctrico de radioisótopos de tipo MMRTG (Multi-Mission Radioisotope Thermoelectric Generator) con 4,8 kg de dióxido de plutonio capaz de generar 2700 Wh/día de calor y 123 W de potencia eléctrica (con un voltaje de 28 V de corriente continua). El plutonio-238 al desintegrarse constituye una fuente constante de calor que es transformado en energía eléctrica gracias a un conjunto de termopares. El MMRTG tiene unas dimensiones de 64 x 66 cm y una masa de 45 kg. Su vida útil se estima en 14 años. Al contrario de lo que mucha gente cree, el MMRTG no alimenta directamente a los sistemas de la nave, sino que se usa para recargar dos baterías de ion-litio con una capacidad de 42 Ah cada una. Para evitar contrastes térmicos elevados, la mayor parte de instrumentos de Curiosity se apagarán durante la noche marciana. El MMRTG no será instalado en la sonda hasta poco antes del lanzamiento, para lo cual se empleará una escotilla lateral en el back shell.






Cápsula atmosférica y etapa de descenso
Durante el viaje a Marte, Curiosity estará situado dentro de una cápsula (aeroshell) que se divide en el escudo trasero (back shell) y el escudo térmico propiamente dicho (heat shield). La masa total de la cápsula es de 2401 kg al lanzamiento. El aeroshell incluye varios lastres de tungsteno para cambiar el centro de gravedad de la cápsula y maniobrar así en la atmósfera marciana durante la entrada con ayuda de varios propulsores de gas. En el escudo trasero se encuentra el paracaídas, que, con 16 metros de diámetro, es el más grande que se haya usado en una misión fuera de la Tierra. En esta zona se encuentran también dos antenas integradas en las líneas del paracaídas, una en banda X para conexión directa con la Tierra y otra de UHF para comunicarse a través de las sondas que se hallan en órbita alrededor de Marte.

El escudo térmico, de 4,5 metros de diámetro, está construido por Lockheed-Martin y es el más grande usado en Marte y en una sonda espacial no tripulada, superando incluso al escudo de las cápsulas Apolo (4 metros de diámetro) o Soyuz (2,2 metros). Sólo el escudo térmico de la Orión será más grande. Como comparación, los escudos de los MER Spirit y Opportunity medían 2,65 metros. Está construido usando PICA (Phenolic Impregnated Carbon Ablator), un material de ablación capaz de resistir los 2100º C de la entrada atmosférica y que ya ha sido usado con éxito en la cápsula de la misión Stardust.



Curiosity se encuentra unido a la etapa de descenso, un sistema de propulsión que se encargará de situar el rover en la superficie de Marte. La etapa de descenso emplea ocho motores de hidrazina denominados MLE (Mars Lander Engines) construidos por Aerojet. Por primera vez en una misión planetaria, los MLE tienen un empuje regulable, alcanzando un máximo de 3300 N cada uno. La etapa de descenso emplea 387 kg de hidrazina distribuidos en tres tanques esféricos. La alimentación de los motores se consigue mediante presión gracias a dos tanques de helio. Será la etapa de descenso la que llevará a cabo la delicada maniobra Sky Crane para aterrizar en Marte. Como su nombre indica, durante esta maniobra Curiosity colgará de esta etapa, que actuará como una grúa volante hasta situar el vehículo en la superficie. Por este motivo, el rover está unido a la etapa de descenso a través de tres cables de sujeción con una longitud máxima de 7,5 metros, además de un umbilical con conexiones eléctricas. Esta etapa estará controlada en todo momento por el ordenador central del rover e incluye también antenas de comunicaciones (banda X y UHF), además de el radar Doppler de aterrizaje dotado de seis antenas.


Detalle de la etapa de descenso unida a Curiosity: 1: Radar Doppler, 2: Motores Principales, 3: Sistema de control de actitud , 4: Antena UHF, 5: rover (NASA).

Detalles de la cápsula atmosférica: 1: Escudo térmico, 2: Escudo trasero, 3: lastres de tungsteno, 4: Sistema de control de actitud (4 motores) , 5: Escotilla de entrada (dos), 6: Ventana, 7: Puntos de unión del escudo térmico, 8: Compartimento del paracaídas, 9: Unión de los escudos, 10: Lastre de tungsteno, 11: cubierta de las antenas. (NASA).
Etapa de crucero interplanetario
La cápsula de entrada atmosférica está unida a una etapa de crucero de 539 kg que se encargará de las maniobras durante el trayecto hasta el planeta rojo. La etapa de crucero, de forma toroidal, está construida en aluminio e incluye una antena de media ganancia, cuatro sensores solares, un sensor estelar y diez radiadores, además del sistema de propulsión. Este sistema consiste en ocho propulsores monopropelentes de 5 N de empuje agrupados en dos conjuntos, alimentados por dos tanques de hidrazina de 48 cm de diámetro. La alimentación eléctrica de la etapa de crucero corre a cargo de seis paneles solares de 12,8 metros cuadrados situados en la parte superior de la misma que generarán entre 2500 W y 1080 W.

Curiosity dispondrá del conjunto más avanzado y complejo de instrumentos científicos en la historia de la exploración de Marte. Hay diez instrumentos principales:
Mastcam (Mast Camera): son los ojos de la sonda. Literalmente, porque al estar situados en la parte superior del mástil de instrumentos le dan al rover una apariencia humana muy característica. Este instrumento incluye dos cámaras independientes (dos «ojos») de dos megapíxel cada una situadas a dos metros sobre el nivel del suelo capaces de grabar vídeo de alta definición con diez imágenes por segundo. Las lentes están separadas 25 cm entre sí, lo que permitirá realizar imágenes en estéreo. Cada cámara usa un detector CCD Kodak de 1600 x 1200 píxel y posee una memoria flash de 8MB. El «ojo derecho» o Mastcam 100 posee un teleobjetivo de 100 mm de focal capaz de alcanzar una resolución de 7,4 cm por píxel a un kilómetro de distancia o de 150 micras (!) a dos metros de distancia. Cada imagen tendrá un campo de 6º x 5º. El «ojo izquierdo» o Mastcam 34 cuenta con una lente de 34 mm de focal. Podrá obtener imágenes con una resolución de 22 cm a un kilómetro de distancia o de 450 micras a dos metros. El campo de cada imagen tendrá un tamaño de 18º x 15º. A diferencia de otras cámaras instaladas en sondas espaciales Mastcam no necesita realizar tres exposiciones con tres filtros distintos para obtener una imagen en color, ya que el CCD está cubierto por una red que incluye filtros para los colores rojo, verde y azul. De todas formas, cada cámara tiene una rueda de filtros tradicionales para varias longitudes de onda. Uno de los filtros permitirá obtener imágenes directas del Sol para medir la cantidad de polvo en suspensión en la atmósfera. Mastcam ha sido construido por Malin Space Science Systems.


ChemCam (Chemistry and Camera): éste es sin duda el instrumento más espectacular de la misión. Consiste en un láser infrarrojo de un megavatio de potencia capaz de vaporizar rocas a siete metros de distancia para analizar espectroscópicamente la composición del plasma resultante. ChemCam está situado encima de Mastcam e incluye un telescopio de 110 mm de focal y una cámara monocromática con un CCD de 1024 x 1024 píxel. La luz resultante de la vaporización es captada por el telescopio y dirigida a través de seis metros de fibra óptica hasta tres espectrómetros situados en el interior del rover. Los espectrómetros podrán analizar 6144 longitudes de onda distintas en el rango de 240-850 nm (del ultravioleta al infrarrojo). Es la primera vez que se utiliza esta técnica espectroscópica en una misión interplanetaria. ChemCam ha sido diseñada en el Los Alamos National Laboratory con la colaboración de la agencia espacial francesa (CNES). El CNES ha suministrado el láser (construido por Thales) y el telescopio, mientras que los espectrómetros son obra del LANL.


APXS (Alpha Particle X-Ray Spectrometer): este espectrómetro está situado en el extremo del brazo robótico de Curiosity y es muy similar a los APXS de los rovers marcianos Sojourner, Spirit y Opportunity, pero cinco veces más sensible. Incluye una pequeña cantidad (700 microgramos, el doble del APXS de los MER) de curio-244 radiactivo para generar partículas alfa (de 5 MeV) y rayos X (14-18 keV) necesarios para llevar a cabo estudios espectrométricos de las rocas marcianas en contacto con el instrumento. Funciona en contacto directo con la roca y puede detectar concentraciones de sustancias de hasta un 0,5% de la composición. A diferencia de los APXS de los MER, este instrumento lleva incorporado un refrigerador que le permite funcionar a cualquier hora del día, no solamente durante la noche. APXS ha sido construido por la agencia espacial canadiense (CSA).


MAHLI (MArs Hand Lens Imager): MAHLI es un microscopio geológico para estudiar las rocas marcianas en detalle. Consiste en una cámara a color instalada en el extremo del brazo robot que podrá obtener imágenes en alta resolución de las piedras y del suelo alrededor del rover. Es capaz de obtener imágenes con unas dimensiones de 2,2 cm x 1,7 cm y una resolución de 14 micras por píxel a 21 mm de distancia. Dispone de una rueda con filtros para imágenes en color, un CCD de 1600 x 1200 píxels y una memoria flash de 8 MB. Para iluminar los objetivos, MAHLI va equipada con dos diodos que emiten luz ultravioleta de 365 nm, lo que permitirá además detectar la posible fluorescencia de algunos materiales. MAHLI ha sido construido por Malin Space Science Systems.

SAM (Sample Analysis at Mars): se trata del instrumento de mayor tamaño de la sonda e intentará buscar compuestos relacionados con la presencia de vida, además de analizar el misterioso metano marciano. Está situado en el interior del rover y analizará muestras de gases atmosféricos y del polvo recogido por los instrumentos del brazo robot. Incluye dos hornos de 40 W para calentar las muestras hasta 1000º C. Tiene un espectrómetro de masas (QMS, Quadrupole Mass Spectrometer), un espectrómetro láser (TLS, Tunable Laser Spectrometer) y un cromatógrafo de gases (GC). SAM ha sido construido por el Goddard Space Flight Center de la NASA con colaboración del CNES francés, que ha desarrollado el cromatógrafo de gases. El JPL de la NASA ha suministrado el espectrómetro láser, mientras que la empresa Honeybee Robotics diseñó el sistema de manipulación de muestras.

CheMin (Chemistry and Mineralogy): este instrumento de 10 kg analizará las muestras y el polvo de roca captadas por el brazo robot de la sonda mediante difracción por rayos X y fluorescencia de rayos X. Está instalado en la parte frontal del rover y se accede a él mediante un embudo con una tapa. Antes de ser analizadas, las muestras son filtradas para eliminar cualquier partícula con un tamaño superior a las 150 micras. El instrumento incluye 32 celdillas para las muestras, cinco de ellas con muestras terrestres de referencia para el calibrado del instrumento. CheMin ha sido construido por el Ames Research Center de la NASA.

REMS (Rover Environmental Monitoring Stations): se trata de un instrumento construido en España que será el encargado de monitorizar diariamente el tiempo atmosférico marciano. Dispone de sensores para medir la velocidad del viento, presión atmosférica, humedad y temperatura dispuestos en dos sondas que sobresalen horizontalmente del mástil del rover. Las dos sondas están separadas 120º entre sí para medir la velocidad del viento sin que interfiera el mástil. REMS incluye además un sensor ultravioleta (200-400 nm) en la cubierta del rover. Ha sido construido por el Centro para el Desarrollo Tecnológico Industrial y el Ministerio de Ciencia e Innovación de España. El investigador principal de REMS es Javier Gómez Elvira, del Centro de Astrobiología de Madrid.

RAD (Radiation Assessment Detector): medirá la radiación ambiental en el entorno de Curiosity, un elemento crucial para planificar una futura misión tripulada al planeta rojo. Este instrumento de 1,7 kg detectará rayos gamma, neutrones y partículas cargadas (de Z=1 – 26) de los rayos cósmicos. Será el primer instrumento que mida las dosis de radiación en la superficie marciana de forma directa. RAD ha sido construido por la NASA en colaboración con la agencia espacial alemana (DLR).

DAN (Dynamic Albedo of Neutrons): este instrumento se encargará de detectar agua en el subsuelo marciano. DAN medirá la dispersión de neutrones provenientes de un generador de neutrones situado en la parte derecha del rover. DAN ha sido construido por la Agencia Espacial Rusa (Roscosmos) y es similar a otros instrumentos transportados por las sondas Mars Odyssey o Fobos-Grunt.

MARDI (Mars Descent Imager): esta cámara se encargará de filmar por primera vez el aterrizaje de una sonda en Marte. Consta de una cámara de gran angular con una CCD de 1600 x 1200 píxel que podrá obtener hasta cuatro imágenes por segundo con una resolución máxima de 1,5 mm. MARDI ya fue instalada en las sondas Mars Polar Lander y Phoenix, pero en el primer caso la sonda se estrelló y en el segundo caso se decidió no emplearla por motivos de seguridad.

El extremo del brazo robot donde se encuentra el APXS y MAHLI recibe el nombre de SA/SPaH (Sample Acquisition, Processing and Handling) y está dotado de varias herramientas capaces de retirar el polvo de las rocas y taladrar muestras de hasta 5 cm de profundidad. Está diseñado para captar un mínimo de 70 muestras y trasladar el contenido hasta los instrumentos situados en la parte superior del rover.


Misión
Curiosity despegará a bordo de un cohete Atlas V 541 desde el Complejo de Lanzamiento 41 de la Base Aérea de Cabo Cañaveral. La ventana de lanzamiento se abre el 25 de noviembre y finaliza el 18 de diciembre de 2011, aunque la duración precisa de la ventana cambia cada día. Al principio durará 103 minutos al día, pero a mediados de diciembre disminuirá hasta los 44 minutos. La duración del viaje a Marte dependerá del momento preciso del lanzamiento, pero si tiene lugar el 26 de noviembre la sonda tardará unos 255 días en llegar a su objetivo. La nave realizará como mínimo seis maniobras de corrección de su trayectoria o TCM (Trajectory Correction Maneuvers), tres durante la fase de crucero y otras tres durante la fase de aproximación. La primera maniobra tendrá lugar a los 15 días del lanzamiento, la segunda a los 120 días y la tercera 60 días antes del aterrizaje. Las dos primeras maniobras servirán para corregir los posibles errores de inserción en la trayectoria producidos durante el lanzamiento y permitirán situar a Curiosity en el rumbo preciso para alcanzar Marte. Esto es necesario porque la sonda se lanzará inicialmente en una trayectoria que pasará a varios cientos o miles de kilómetros de Marte, para evitar así que la etapa superior Centaur pueda alcanzar accidentalmente el planeta rojo y contaminar la superficie con microbios terrestres. Recordemos que Curiosity ha sido esterilizado para evitar cualquier tipo de contaminación biológica. En esta fase la nave rotará sobre su eje dos veces por minuto para garantizar la estabilidad del conjunto. Durante la fase de aproximación (45 días antes del aterrizaje) están previstas otras tres correcciones adicionales: ocho días, dos días y nueve horas antes del aterrizaje, respectivamente.


La fase más crítica de la misión después del lanzamiento será la entrada atmosférica, el descenso y el aterrizaje en Marte, una fase conocida en conjunto como EDL (Entry, Descent and Landing) y que tendrá una duración de apenas siete minutos. La etapa crucero de la sonda se separará diez minutos antes de la entrada atmosférica, liberando la cápsula. La nave alcanzará la frontera con la atmósfera marciana a una altura de 131 kilómetros formando un ángulo de 15º y viajando a una velocidad de 5,9 km/s mientras gira dos veces por minuto. Curiosity será la primera misión marciana que no realizará una entrada balística, lo que significa que empleará la pequeña fuerza de sustentación generada por la forma del escudo térmico para orientarse durante el descenso. Para ello, varios propulsores de gas situados en el escudo superior frenarán la rotación de la nave y se encargarán de mantener la orientación precisa durante el descenso hipersónico. Un descenso controlado requiere que el centro de gravedad de la cápsula no coincida con el eje de simetría del vehículo. Por eso, Curiosity lleva dos lastres de tungsteno de 75 kg cada uno que se separarán antes de la entrada, cambiando así el centro de gravedad. Estos lastres se han añadido para asegurar la simetría del vehículo durante el resto de las fases. Las cápsulas tripuladas realizan un descenso parecido durante la reentrada en la atmósfera terrestre. Entre las maniobras hipersónicas que realizará Curiosity se incluyen una serie de curvas en «S» para reducir la distancia horizontal recorrida por la sonda. Gracias a esta técnica, la elipse de aterrizaje tiene una longitud de solamente 20 x 25 km, todo un récord que permitirá un descenso controlado dentro del Cráter Gale.





El máximo calentamiento tendrá lugar 80 segundos después del inicio de la entrada, cuando el escudo alcance los 2100º C. La máxima aceleración se sentirá diez segundos más tarde. Cuando el ordenador de la sonda «sienta» que la aceleración alcanza un valor predeterminado, se desplegará el paracaídas a Mach 2,2, una maniobra que ocurrirá unos 225 segundos después de comenzar la reentrada y a 11 km de altura mientras la nave viaja a 1458 km/h (las cifras exactas dependerán de las condiciones atmosféricas, por lo que la apertura del paracaídas podría variar en 10-20 segundos). Con un diámetro de 16 metros y unas líneas de 50 metros de longitud, el paracaídas es el más grande jamás usado en una misión planetaria y está fabricado en nylon y poliéster. Antes del despliegue del paracaídas la sonda soltará otros seis lastres de tungsteno con una masa de 25 kg cada uno para permitir que el centro de masas de la sonda vuelva a estar situado en el eje de simetría del vehículo. 24 segundos después se separará el escudo térmico, a 8 km de altura, momento en el cual el instrumento MARDIS comenzará a grabar el descenso. Si todo va bien, el radar Doppler también empezará a «olfatear» la presencia del terreno marciano bajo la nave.
A 1,6 km de altura se separará el escudo trasero con el paracaídas y dará comienzo el dramático descenso propulsado, una fase conocida como Sky Crane. En esta última etapa, la sonda estará controlada por los ocho motores de empuje variable de la etapa de descenso. Una vez alcanzada una velocidad de descenso vertical de unos 27 km/h, cuatro de los motores se apagarán y Curiosity mantendrá esta velocidad hasta el aterrizaje. 12 segundos antes del contacto con el suelo marciano y a 20 metros de altura, el rover se separará de las conexiones rígidas de la etapa de descenso y comenzará a descender sujetado por tres cables de nylon. Poco antes del aterrizaje se desplegarán las ruedas del rover, que por primera vez en una sonda espacial servirán al mismo tiempo como tren de aterrizaje. En el momento del contacto, la etapa de descenso cortará los cables de unión y se alejará del rover, estrellándose a más de 150 metros de distancia.


Si todo transcurre según lo previsto, el 12 de agosto de 2012, para cuando el reloj marque las 03:00, hora local en el Cráter Gale, el vehículo más complejo jamás diseñado por el hombre se habrá posado en Marte. Curiosity estudiará el planeta rojo durante un año marciano como mínimo, o lo que es lo mismo, 687 días terrestres o 669 días marcianos (soles).
El Cráter Gale
La selección del lugar de aterrizaje de Curiosity no fue nada fácil. El lugar debía permitir un descenso seguro del vehículo y tener un alto interés científico. Tras muchos debates, la comunidad científica propuso tres lugares finalistas: los cráteres Eberswalde, Holden y Gale. Con lo que parece ser un antiguo delta fluvial en su interior, Eberswalde parecía el favorito de los científicos, pero finalmente la comunidad se decantó por los misteriosos sedimentos del Cráter Gale. Al fin y al cabo, si el delta de Eberswalde resultaba tener un origen no fluvial, Curiosity tendría poco que investigar en esa zona.

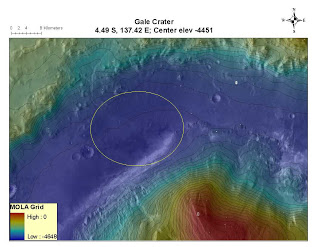
El Cráter Gale tiene unos cien kilómetros de diámetro y está situado cerca del ecuador marciano (4,5° S, 137,4° E). Su característica principal es que cuenta con un impresionante montículo central de 5 km de altura, mientras que las paredes son mucho más bajas. Por este motivo, los científicos creen que el cráter ha sufrido una serie de procesos erosivos que han dejado al descubierto un precioso tesoro: capas y capas de sedimentos que prometen desentrañar el pasado de Marte. Curiosity aterrizará en el interior de Gale en una zona que parece estar formada por sedimentos aluviales provenientes quizás de un antiguo río que atravesaba la pared del cráter. Sin embargo, algunos críticos sugieren que los atractivos sedimentos de Gale podrían deberse a la acción del viento en vez de al agua. ¿Será cierto? ¿Qué otros secretos encierran los sedimentos del Cráter Gale? A partir de agosto de 2012 saldremos de dudas.



Vídeo: el interior del cráter Gale:
Vídeo: lanzamiento y aterrizaje de Curiosity:
impresionante entrada !
¿No se lanza el viernes?
Una entrada muy buena, un análisis a fondo.
Por cierto, es una sonda muy compleja, y con un sistema de aterrizaje, más complejo todavía. Espero que les salga todo bien.
Impresionante mision
Ojala ojala ojala que todo vaya bien (hay tantas cosas que pueden ir mal que me quito el sombrero por los ingenieros de la mision)
Los instrumentos son a cual mas interesantes
Por lo que me comentan mis colegas del curro queeatan con Exomars, la parte de re-entrada es simplemente BESTIAL, tanto el peazo de paracaidas y escudo como la entrada no balistica y la fase de sky-crane… Un sueño para cualquier ingeniero de GNC !!
Suerte !!!!!!
Muy bueno Daniel, el mejor artículo que leí sobre MSL. Por otra parte, después de ver la complejidad técnica de esta misión se entiende su elevado costo, realmente es una maravilla de la tecnología moderna.
Por que las cámaras tienen tan poca resolución?? Mi celular es de 5 MPx y sale 100 dolares y el MSL le pusieron solo 2 MPx ??? Les regalo mi celular!
No debería llevar una mega cámara de 15 mpx con alta sensibilidad y larga exposición a la luz, modo macro, flash automático, control cromático, regulador de foco, etc?? Esa nave se va a otro planeta!! Denle una buena cámara!
Excelente entrada Daniel
Gaston, no se pueden llevar megacámaras porque el ancho de banda de la conexión marte-tierra es un muy pobre y no se pueden enviar imagenes muy pesadas.
Sin quitar importancia a las estaciones espaciales, ésta misión, por su complejidad, es lo más ilusionante y apasionante que ha ocurrido en la historia espacial desde el programa Apolo.
Ojalá den el descenso en directo.
Gaston,
sí, pero prueba a utilizar tu celular en Marte…
Los recortes que están haciendo en este campo son una cagada de tamaño planetario. El futuro como especie sin duda alguna está en el espacio exterior.
Espectacular entrada Daniel, gran trabajo el tuyo para un grandísimo resultado. Ahora solo queda esperar que todo vaya bien. Mucha suerte para la misión y enhorabuena por el post.
Sl2 🙂
Primero quiero felicitar al autor del blog, llevo siguiéndolo desde hace unas semanas y me parece genial!
En cuanto a esta entrada, también fantástica, me había enterado hace tiempo de que querían enviar otro robot a Marte, pero no tenía tanta información como la que viene aquí reflejada.
La misión me parece genial, impresionante, y con el sistema de la re-entrada y el sky-crane me he quedado bastante de piedra. Ojalá que salga todo bien!
lo mas inportante en una camara digital no son los mpx sino el tamaño de la CCD
En cámaras de buena calidad lo que menos importa son los megapixeles.
Por otro lado donde podría encontrar más información del generador (MMRTG)?
Excepcional entrada. Muchas gracias!
muy bien explicado, sobre todo para los no conocedores del tema en profundidad como yo.
Gracias por tu gran labor
Dios mio Daniel que bien explicado, como se agradece este tipo de blogs, habria que hacer un monumento a todos los que haceis este tipo de trabajo gratis.
Muchas gracias por la información.
saludos jorge m.g.
Esto es realmente emocionante… que el ser humano pudiera solucionar todos sus problemas y centrarse como una raza madura en la exploración espacial sería un sueño.
Las imágenes de «Detalle de la fase de entrada y descenso (NASA)» no se corresponden al descenso del Curiosity, son de misiones anteriores.
!¿300Kg de lastre?!
Estoy alucinado con este dato. ¿No habia otra forma de conseguir mover en centro de masas?